

3 Механические характеристики производственных механизмов и электродвигателей
Основной функцией электропривода является приведение в движение рабочей машины в соответствии с требованиями технологического режима. Движение это совершается механической частью электропривода (МЧ ЭП), в состав которой входит ротор электродвигателя, передаточное устройство и рабочая машина (рис. 3.1). Приведенные на рис. 3.1 параметры обозначают Мв, Мрм, Мио – моменты на валу двигателя, рабочей машины, исполнительного органа; ωв, ωрм , ωио – угловые скорости вала ЭД, рабочей машины, исполнительного органа; Fио, Vио – усилие и линейная скорость исполнительного органа. В зависимости от вида передачи и конструкций рабочей машины различают (рис. 3.1):
ЭП вращательного движения, обеспечивающий, соответственно, вращательное движение исполнительного органа РМ; выходные параметры – момент ИО механизма Мио и угло-вая частота вращения ωио;
ЭП поступательного движения, обеспечивающий поступательное линейное движение ИО рабочей машины; выходные параметры – усилие Fио и линейная скорость Vио.

Рисунок 3.1
Отметим, что существует также специальный ЭП, называемый колебательным электроприводом, обеспечивающим возвратно-поступательное (вибрационное) движение (как угловое, так и линейное) исполнительного органа РМ.
В механической части ЭП действуют различные виды усилий, моментов, различающиеся характером действия. Различают статические моменты реактивные Мср и активные Мса.
Реактивные моменты создаются силой трения, силами сжатия, растяжения, кручения неупругих тел. Классическим примером здесь может служить сухое трение (рис. 3.2). Силы трения всегда противодействуют движению и при реверсе электропривода момент трения, обусловленный этими силами, также меняет направление, а функция Мс(ω) при скорости ω = 0 претерпевает разрыв. Силы трения проявляются в передачах электродвигателя и рабочих машинах.
Активные (потенциальные) моменты создаются силой тяжести, силами сжатия, растяжения, кручения упругих тел. В МЧ ЭП активные моменты возникают в нагруженных элементах (валы, зубчатые зацепления и т.п.) при их деформации, поскольку механические связи не являются абсолютно жесткими. Особенности действия потенциальных моментов наглядно проявляются на примере силы тяжести. При подъеме или спуске груза направление силы тяжести Fj остается постоянным. Иными словами, при реверсе электропривода направление активного момента Мса сохраняется неизменным (рис. 3.3).
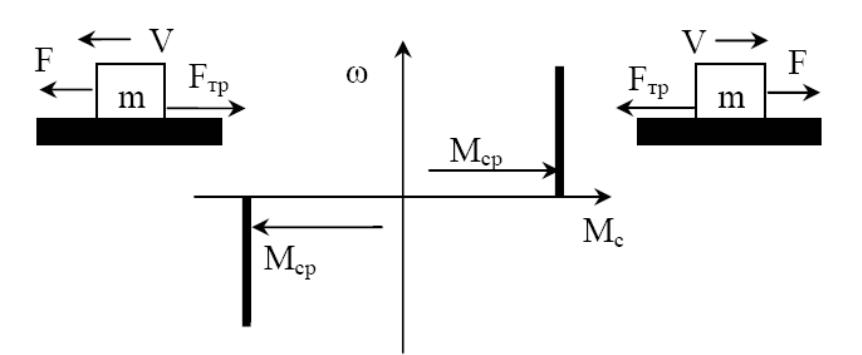
Рис. 3.2. Зависимость статического момента сил сухого трения от скорости
Краткий анализ видов Мс показывает, что между реактивными и активными моментами имеется существенное отличие: реактивный момент с изменением направления движения также меняет свое направление, активный же момент сохраняет его постоянным.
Рабочие машины, несмотря на большое многообразие конструкций и выполняемых операций, могут быть классифицированы по виду зависимости статического момента от ряда факторов. Можно выделить следующие основные группы механизмов.
К первой группе относятся механизмы, у которых статический момент не зависит от скорости вращения, то есть Мс(ω) = const. Это значит, что механическая характеристика рабочей машины – зависимость статического момента от частоты вращения – представляет прямую, параллельную оси угловой скорости ω, и претерпевает разрыв при ω = 0 для реактивных статических моментов (как показано на рис. 3.2), например, для ленточного транспортера с равномерной погонной нагрузкой.

Рис. 3.3. Зависимость активного статического момента от скорости, характерная для механизмов подъема грузов
Для активных Мс (как показано на рис. 3.3) механическая характеристика не зависит от направления движения. Типичным примером является механизм подъемника.
Вторая группа механизмов достаточно представительна. Здесь Мс зависит от скорости вращения РМ:
МС(ω) = МС0 + (МСН + МС0) (ω / ωн)а
(3.1)
где Мсо – момент механических потерь на трение;
Мсн – статический момент рабочей машины при номинальной скорости вращения ωн;
ω – текущая скорость вращения;
а – коэффициент пропорциональности.
При а = 0 имеем Мс(ω) = Мсн, то есть получаем механическую характеристику машин первой группы.
При а = 1 имеем линейную зависимость статического момента от скорости, что присуще, например, генераторам G постоянного тока, работающим на постоянное сопротивление R (рис. 3.4).
При а = 2 (рис. 3.5) получаем наиболее многочисленную группу рабочих механизмов], имеющих вентиляторную характеристику (вентиляторы, гребные винты, центробежные насосы и другие подобные механизмы).
При а = -1 имеет место гиперболическая зависимость, характерная для большинства металлорежущих станков, когда с увеличением скорости подачи резца V (соответственно при этом увеличивается усилие резания) снижает скорость обработки детали ω (рис. 3.6).
Отметим, что на практике встречаются и другие значения коэффициента а.
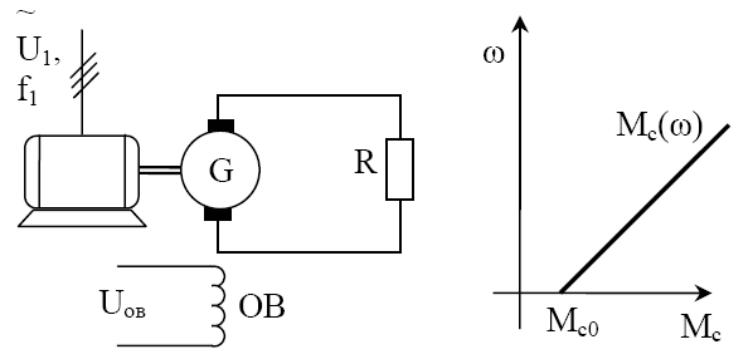
Рис.
3.4. Механическая характеристика при а
= 1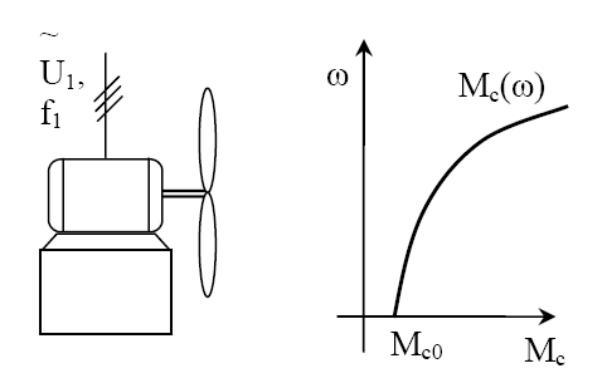
Рисунок 3.5 Вентиляторная механическая характеристика
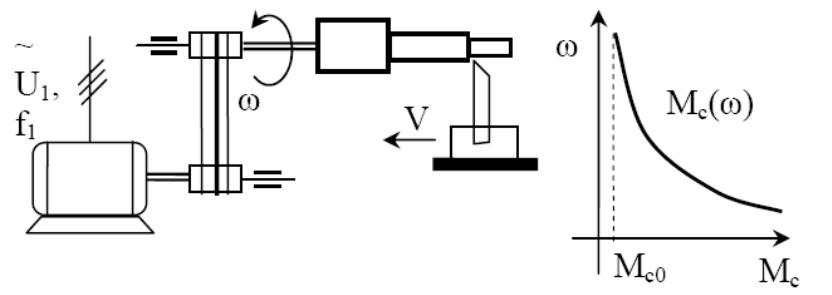
Рис. 3.6. Гиперболическая механическая характеристика
Механические характеристики электродвигателей
Прежде чем перейти к рассмотрению характеристик электродвигателей, дадим некоторые определения.
Механическими характеристиками двигателя называются зависимости установившейся частоты вращения от вращающего момента ω = f(M).
Электромеханическими характеристиками двигателя называются зависимости установившейся частоты вращения от тока – ω = f(I).
Характеристики называют естественными, если они получены при номинальных условиях питания (при номинальных напряжении и частоте вращения), номинальном возбуждении и отсутствии добавочных сопротивлений в цепи якоря. Характеристики двигателя называются искусственными при изменении любого из перечисленных выше факторов.
Для вывода электромеханической и механической характеристик двигателя постоянного тока с независимым возбуждением рассмотрим простейшую схему включения двигателя (рисунок 3.9).
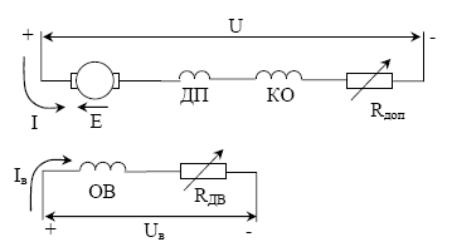
Рисунок 3.7- Схема электрическая принципиальная двигателя постоянного тока независимого возбуждения
К якорю электродвигателя прикладывается напряжение сети постоянного тока Uc = U, которое в установившемся режиме уравновешивается ЭДС (Е) двигателя и падением напряжения в цепи якоря (Iя·Rяц).
U = Е + Iя·Rяц , (3.2)
где Rяц = Rя + Rдоп + Rдп + Rко – полное сопротивление цепи якоря, Ом;
Rя – сопротивление обмотки якоря, Ом;
Rдоп – добавочное сопротивление в цепи якоря, Ом;
Rдп , Rко – соответственно, сопротивления обмоток дополнительных полюсов и компенсационной обмотки, Ом;
Е = КФω – ЭДС двигателя
КФ(С)-величина, характеризующая магнитный поток двигателя
Подставив в уравнение (4.1) значение Е и произведя соответствующие преобразования относительно частоты вращения ω, получим электромеханическую характеристику электродвигателя постоянного тока независимого возбуждения
 (3.3)
(3.3)
Выразив величину тока якоря через электромагнитный момент М=КФI и подставив значение тока в уравнение (4.2), найдем механическую характеристику двигателя постоянного тока с независимым возбуждением:
![]() (3.4)
(3.4)
А нализируя
уравнения (3.3) и (3.4), видим, что математически
это уравнения прямой линии, пересекающей
ось скоростей в точке ω
0
(рисунок 3.8-1). Величина ω0
=
U/(К·Ф) – называется скоростью идеального
холостого хода.
нализируя
уравнения (3.3) и (3.4), видим, что математически
это уравнения прямой линии, пересекающей
ось скоростей в точке ω
0
(рисунок 3.8-1). Величина ω0
=
U/(К·Ф) – называется скоростью идеального
холостого хода.
Рисунок 3.8- Механическая характеристика двигателя постоянного тока независимого (параллельного ) возбуждения
Для двигателя постоянного тока последовательного возбуждения (рисунок.3.8-2)
Для асинхронного электродвигателя механическая характеристика имеет более сложный вид (рисунок 3.9 -1).

Рисунок 3.9
ω0 – синхронная скорость;
Мк – максимальный (критический) момент;
Мп- пусковой момент.
Для синхронного электродвигателя вид прямой линии параллельной оси момента (рисунок 3.9-2).
4. Режимы работы электропривода. Регулирование скорости электроприводов
Уравнение движения электропривода
Р ассмотрим
простейшую механическую систему,
состоящую из вращающейся части двигателя
(ротора или статора - РД) и рабочего
органа (РО) механизма, имеющего вращательное
движение, присоединенного непосредственно
к валу двигателя (рисунок 4.1). В системе
действуют два момента – момент,
развиваемый двигателем МД и момент
статической нагрузки МС, в который
входят момент, создаваемый рабочим
органом механизма и моменты трения. Эти
моменты характеризуются величиной и
направлением действия. Если МД и
МС действуют в направлении
движения, их называют движущими,
если их знаки противоположны знаку
скорости, моменты называют тормозящими.
В соответствии с принципом Деламбера,
совместное действие МД и МС
определит величину и знак динамического
момента
ассмотрим
простейшую механическую систему,
состоящую из вращающейся части двигателя
(ротора или статора - РД) и рабочего
органа (РО) механизма, имеющего вращательное
движение, присоединенного непосредственно
к валу двигателя (рисунок 4.1). В системе
действуют два момента – момент,
развиваемый двигателем МД и момент
статической нагрузки МС, в который
входят момент, создаваемый рабочим
органом механизма и моменты трения. Эти
моменты характеризуются величиной и
направлением действия. Если МД и
МС действуют в направлении
движения, их называют движущими,
если их знаки противоположны знаку
скорости, моменты называют тормозящими.
В соответствии с принципом Деламбера,
совместное действие МД и МС
определит величину и знак динамического
момента
![]() (J-момент инерции),
определяющего ускорение системы. Таким
образом, уравнение движения системы в
общем случае имеет вид
(J-момент инерции),
определяющего ускорение системы. Таким
образом, уравнение движения системы в
общем случае имеет вид
![]() .
(4.1)
.
(4.1)
Проведем простейший анализ уравнения (4.1) для двигательного режима работы ЭП, когда
![]() .
(4.2)
.
(4.2)
При МД > МС dω/dt > 0 имеет место режим ускорения привода, при МД < МС dω/dt < 0 и имеет место режим замедления привода, а при МД = МС динамический момент и ускорение равны нулю. Первые два режима называют переходными, а последний – установившимся (стационарным).
Работа электродвигателя характеризуется следующими основными величинами:
• М – электромагнитный момент, развиваемый электродвигателем, Н·м;
•Мc – момент сопротивления (нагрузка, статический момент), создаваемый производственным механизмом, Н·м,
• Iя – ток якоря электродвигателя, А;
• U – напряжение, приложенное к якорной цепи, В;
• Е – электродвижущая сила (ЭДС) машины постоянного тока (для электродвигателя ее называют противоЭДС, так как в электродвигателе она направлена навстречу напряжению U и препятствует протеканию тока);
• Ф – магнитный поток, создаваемый в электродвигателе при протекании тока возбуждения по ОВ, Вб;
• Rя – сопротивление цепи якоря, Ом;
• ω – угловая частота (скорость) вращения якоря
• Р – мощность двигателя, Вт.
Различают механическую (полезную) мощность на валу двигателя -Рмех
Рмех = М · ω , (4.3)
и полную (электрическую) мощность
Рэл = U · Iя ; (4.4)
Из уравнений электромеханической и механической характеристик электродвигателя постоянного тока с независимым возбуждением:
![]() ;
;
![]() ,
,
где С = кФ ,
![]() следует, что возможны три основных
способа регулирования угловой скорости
(см. рисунок 4.1):
следует, что возможны три основных
способа регулирования угловой скорости
(см. рисунок 4.1):
а) изменением напряжения UЯ, подводимого к якорю;
б) изменением сопротивления цепи якоря двигателя переменным добавочным резистором RД;
в) изменением тока возбуждения IВ (воздействие на величину магнитного потока, коэффициент - С).

Рисунок 4.1-Схемы включения электродвигателя для основных способов регулирования.
Вид типичных электромеханических и механических характеристик, полученных в этих схемах регулирования, представлен на рисунке 4.2.


Рисунок 4.2- Механические и электромеханические характеристики для трех способов регулирования: а) регулирование напряжением на якоре двигателя; б) регулирование добавочным резистором в цепи якоря; в) и г) регулирование током возбуждения, электромеханические и механические.
Принцип частотного регулирования скорости АД и СД
Скорость вращения ротора асинхронной и синхронной машин зависит от частоты питающей сети. При этом синхронная скорость ( когда скорость вращения ротора равна скорости вращения поля статора) определяется известной формулой
![]()
![]() или
или
![]()
где f - частота питающей сети;
р – число пар полюсов конкретного электродвигателя;
ω0 - скорость вращения в рад/сек;
n0 - тоже в об/мин.
Отсюда легко определяется синхронная скорость при известной частоте сети. Так, если f = 50 Гц то при одной паре полюсов n0 = 3000 об/мин, две пары n0 = 1500 , 3р n0 = 1000 и тд. На рисунке 1 приведен пример механических характеристик АД и СД при двух частотах f1 и f2.
 n
n
СД
n0
АД
n01
Рисунок 4.3
Понятно, что если мы будем менять частоту сети то будет и регулироваться скорость двигателя. При снижении частоты сети и неизменном напряжении начнет возрастать ток двигателя. Очевидно, что необходимо одновременно снижать и напряжение на двигателе, в тоже время, учитывая характер нагрузки. Эти вопросы решены основоположниками частотного регулирования ( Костенко и др.). Получены формулы законов частотного регулирования для различных типов механизмов .
Для механизмов с постоянным моментом нагрузки отношение напряжения статора к частоте для всего диапазона регулирования должно оставаться постоянным
U / f = const
Для механизмов с вентиляторной нагрузкой (турбо-механизмы) этот закон выражается следующей формулой
U / f2 = const
В частотно- регулируемых электроприводах ЧРП, система управления предусматривает реализацию заданного закона управления.