

5 Выбор интервала дискретизации
Другим важным аспектом системы управления данными является выбор выборки интервалов дискретизации. Это происходит из-за приближения, которые используются для получения разностных уравнений, описывающих контроллеры. Меньшие интервалы выборки означает, что свойства контроллера будут менее искаженными, следовательно, более предсказуемыми и улучшенными. PID- контроллеры наиболее эффективны, когда интервалов дискретизации малы.
Тем не менее, слишком быстрая выборка - расточительно ресурсов.
стоимость реализации будет увеличиваться, потому что более современные компоненты контроллера должны быть установлены.
DCS как правило, имеет много сотен каналов ввода-вывода канала в управлении. Функционирование DCS будет деградировать значительно, если каждый контур управления, будет работать на максимальной частоте.
быстрая выборка интервала будет означать, что высокочастотные компоненты, такие как шум, также будет отражены в сигнале, а это не всегда выгодно для выполнения контура управления.
Если интервал выборки слишком велик, то произойдет потеря сигнала. В крайнем случае, это явление известно, как "сглаживание или наложение сигнала " (Лекция 4).
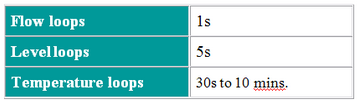
Многие эмпирические правила по выбору времени выборки, ts для для разных типов контуров существуют, в том числе следующие рекомендации:
Таблица 5
Выбор соответствующего интервала выборки должна быть основана на динамике управляемого процесса!
Операция выборки должна отражать ключевые динамические характеристики процесса. Опыт показывает, что интервал выборки - примерно 10% от доминирующей постоянной времени процесса - хорошо работает на практике!
6 Аспекты программирования Время мертвой зоны (Dead Time)
Время мертвой зоны - это время от того момента, когда сигнал контроллера появляется на выходе до того, как PV начнёт изменяться.
Причины появления времени мертвой зоны:
Время измерения, или время выборки при измерениии сигнала.
Время из-за инерции материалов, по которым распространяется сигнал.
Сенсоры и другие элементы контура с имеют время задержки.
Алгоритмы программирования
Есть много возможностей, какой базовый алгоритм использовать:
Действие дифференциальной составляющей применять только на PV, а не при изменении SP.
То же самое при пропорциональном действии. Пропорциональное действие должна быть сначала, в этом случае если вы выбираете дифференциальную составляющую только на PV, вы получаете пропорциональное действие на что-то ещё!
Должна быть защита против интегрального насыщения (reset windup).
Должен быть. фильтр, т.к. он используется ещё для уменьшения дифференциального коэффициента.
Непросто получить дигитальное дифференциальное действие для улучшения аналогового дифференциального действия. Нет программ, выполняющих это. Упростить – это проблема. Это относится к частоте выборки и шуму сигнала. Некоторые алгоритмы используют один или несколько величин из предыдущих величин PV. Кроме того, некоторые производители ограничивают по величине время дифференциала. Очень трудно для пользователя знать, производит ли дифференциальное действие улучшение аналогового дифференциального действия. Нет программ, выполняющих это действие, и описания, как это улучшает свойства дифференциального действия.
Интеграл/сброс интеграла дигитальным контроллером не выполняется. Этот феномен связан с ошибкой квантования, временем выборки, длинным временем интегрирования и расчётом точности, что предотвращает интегрирование нуля ошибки. С ростом разрешения A/D преобразования и компьютерной математики, становится меньше и меньше проблем.
Есть свойства фильтрации шума, такие как получение мёртвой зоны или зоны низкого коэфффициента пропорциональности около set point.