

Ручная настройка, основанная на правилах
Расчет параметров по формулам не может дать оптимальной настройки регулятора, поскольку аналитически полученные результаты основываются на сильно упрощенных моделях объекта. В частности, в них не учитывается всегда присутствующая нелинейность типа "ограничение" для управляющего воздействия (см. раздел Кроме того, модели используют параметры, идентифицированные с некоторой погрешностью. Поэтому после расчета параметров регулятора желательно сделать его подстройку.
Подстройку можно выполнить на основе правил, которые используются для ручной настройки. Эти правила получены из опыта, теоретического анализа и численных экспериментов. Они сводятся к следующему:
увеличение пропорционального коэффициента увеличивает быстродействие и снижает запас устойчивости;
с уменьшением интегральной составляющей ошибка регулирования с течением времени уменьшается быстрее;
уменьшение постоянной интегрирования уменьшает запас устойчивости;
увеличение дифференциальной составляющей увеличивает запас устойчивости и быстродействие.
Перечисленные правила применяются также для регуляторов, использующих методы экспертных систем и нечеткой логики (лекция 14).
Применение правил возможно только после предварительной настройки регулятора по формулам. Попытки настроить регулятор без начального приближенного расчета коэффициентов могут быть безуспешными. Сформулированные выше правила справедливы только в окрестности оптимальной настройки регулятора. Вдали от нее эффекты могут быть иными. При регулировке тепловых процессов настройка по правилам может занять недопустимо много времени.
5 Совместимость типа управляемой системы с соответствующим типом контроллера
Один из самых популярных методов настройки параметров PID-контроллера – это рассчитать их из модели процесса 1-го порядка. Этот подход упрощает процедуру, используя различные законы настройки для разных ситуаций (уровень: контуры с временем задержки и без него) и различные способы управления (PI, PID, и др.) Способность системы к изменению состояния характеризуется временной константой.
Технические системы могут обладать существенно различными временными константами:
Температура: очень медленная
Расход (поток): медленная
Скорость вращения: относительно быстрая
Освещённость: очень быстрая
На рисунке показано совместимость типа управляемой системы с соответствующим типом контроллера:
(+) означает соответствие, (-) – несовместимость..
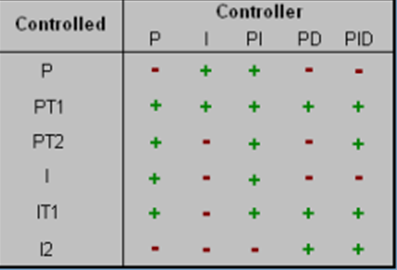
Рис. 3 Совместимость типа управляемой системы с типом контроллера
В большинстве процессов всегда есть время мёртвой зоны - dead time. Это время, которое нужно для PV, чтобы начать изменение после изменения выхода контроллера. В течение этого времени ничего не происходит с (PV). Замкнутый контур (управляемая система ) просто не может быстрее ответить, чем это время пройдёт.
Причины появления времени мёртвой зоны
Время измерения, или время выборки при измерениии сигнала.
Время из-за инерции материалов, по которым распространяется сигнал.
Сенсоры и .. имеют время задержки.
Хотелось бы это время уменьшить. В таких процессах коэффициент пропорциональности нужно увеличить, чтоб получить более быстрый ответ. Но это вызовет колебания системы. Если увеличивать ещё больше, то процесс станет нестабильным. Введение интеграла в закон регулирования позволяет уменьшить установившуюся ошибку системы, а введение производной - увеличить быстродействие.
Установлено, что пропорционально-интегральный контроллер (PI контроллер) – оптимален для линейных систем 1-го порядка без задержек по времени.
Также установлено, что пропорционально-интегрально-дифференциальный контроллер (PID контроллер) – оптимален для линейных систем 2-го порядка без задержек по времени.