

Структура ввода/вывода между процессом и управляющим элементом.
Общая структура ввода/вывода между процессом и управляющим компьютером показана на рис. Хотя на практике используются разнообразные датчики, исполнительные механизмы и согласующие устройства, основная структура интерфейса всегда одна и та же.
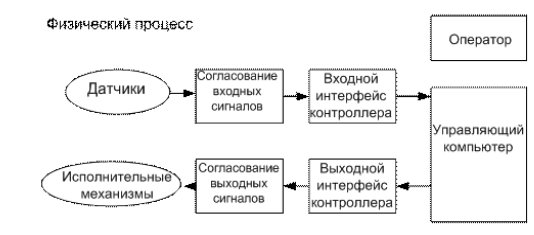
Рис. 8. Общая структура ввода/вывода между процессом и управляющим компьютером
То, что эта структура выглядит очень просто, вовсе не означает, что ее можно легко реализовать. Один из законов Мерфи гласит: "Если вам кажется, что все идет хорошо, скорее всего, вы чего-то не заметили".
7 Современные тенденции автоматизации производства
Важной мотивацией автоматизации производства является безопасность людей, среды и оборудования.
Если это соблюдено, то выгодой автоматического управления являются: Качество продукции, минимальная скорость изготовления, минимальное влияние на окружающую среду минимальное энергопотребление, минимальный расход.
Современными тенденциями в автоматизации производства являются:
широкое применение микропроцессорных средств для управления;
создание машин и оборудования со встроенными микропроцессорными средствами измерения, контроля и регулирования;
переход на децентрализованные (распределенные) структуры управления с PLC;
внедрение человеко-машинных систем;
использование высоконадежных технических средств;
автоматизированное проектирование систем управления.
ЛЕКЦИЯ 2
2 Идея "передающего элемента"
Все компоненты системы автоматики (контура управления) можно рассматривать как передающие элементы, которые принимают предопределенную сигнальную характеристику(и) входной переменной(ых) и генерируют характеристику(и) выходной переменной(ых) в соответствии с определенными физическими соотношениями. Особое значения для инженеров автоматического управления имеют линейные передающие элементы, которые работают по принципу суперпозиции.
Линеаризация физических систем
Подавляющее большинство физических систем являются линейными лишь в некотором диапазоне изменения переменных. Однако при неограниченном возрастании этих переменных все системы я конечном счете становятся нелинейными.
Принцип суперпозиции
Систему можно определить как линейную, если воспользоваться действующим на нее возмущением и реакцией на это возмущение. В общем случае необходимым условием линейности системы является соответствующая связь между возмущением x(t) и реакцией y(t). Если к системе, находящейся в состоянии покоя, приложить возмущение x1(t), то на выходе появится реакция y1(t). Если при тех же условиях подвергнуть систему возмущению x2(t), то она даст соответствующую реакцию y2(t). Необходимым условием линейности является то, чтобы при возмущении x1(t) + x2(t) система давала реакцию y1(t) + y2(t). Это положение обычно называют принципом суперпозиции.
Линейными называются системы, подчиняющиеся принципу суперпозиции, который заключается в том, что реакция объекта на сумму входных сигналов равна сумме реакций на каждый сигнал в отдельности.
Математическая запись принципа суперпозиции состоит из двух соотношений:
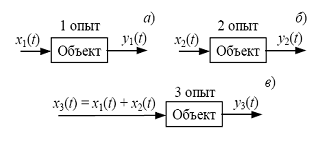
Рис. 1 Принцип суперпозиции
Свойство гомогенности
Кроме того, в линейной системе должен выполняться фактор масштабирования. Пусть входом системы является переменная x, а выходом – переменная y. Тогда необходимо, чтобы при умножении входной переменной на константу m реакция (выходная переменная) системы изменилась в такое же число раз, т.е. оказалась равна m y. Это свойство носит название гомогенности.
![]()
Таким образом, линейная система удовлетворяет свойствам: суперпозиции и гомогенности.