

10 Свойства, усложняющие управление
Нелинейность процесса
Скорость протекания реакции в химических процессах зависит от температуры нелинейно. При некоторой рабочей температуре изменение температуры на несколько градусов вызывает изменение скорости реакции. При другой рабочей температуре изменение скорости реакции (при изменении на то же число градусов) будет другое.
Используются линейные модели нелинейных процессов. Нелинейность есть не только в физических процессах, но и в их интерфейсе с PLC, т.е. в датчиках и исполнительных механизмах. Пример: переключающийся клапан. Он может быть или полностью открыт, или полностью закрыт (0 или 100%), хотя PLC может рассчмтать другие значения. Кроме того, быстро изменяющиеся сигналы управления вызывают износ клапана, поэтому их надо избегать.
Нелинейности в контуре управления
При рассмотрении контуров управления по умолчанию предполагалось, что
в контуре должны присутствовать только линейные компоненты управления, особенно в контроллере (включая PID контроллер или его частные случаи),
управляемая система демонстрирует линейный режим.
В действительности, при более близком рассмотрении, оказывается, что и PID контроллер, и управляемая система в большей или меньшей степени обладают нелинейностью.
Типичной нелинейностью, например, является характеристика ограничителя, которая возникает вследствие того, что фактически каждая физическая переменная имеет минимальную и максимальную величины, которые не могут быть превышены. Соответственно PID контроллер, реализованный, например, с помощью электронной схемы операционного усилителя, не может выдавать произвольно низкие или высокие напряжения в качестве управляемых переменных, его выходное напряжение имеет как верхний, так и нижний предел в соответствии с рабочим напряжением схемы.
Приводы часто имеют подобные недостатки; например, пусковой клапан может увеличивать скорость потока через канал не до бесконечного уровня, а только лишь до некоторого верхнего предела (максимальное открытие вентиля).
Другими типичными нелинейностями являются, например, эффекты насыщения и гистерезиса, которые возникают в обмотках электрических двигателей. Следующий рисунок (Рис. 7) иллюстрирует пример нелинейности в характеристике идеального (то есть линейного во всем интервале входной переменной) P-контроллера (Рис.7.а) и реального P контроллера с ограниченным интервалом управляемой переменной ymin ... ymax (Рис.7 b).
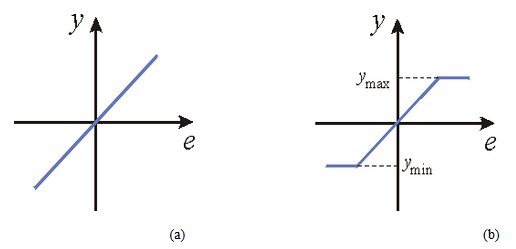
Рис. 7. (a) Xарактеристика идеального P-контроллера
Рис. 7. (b) Характеристика P контроллера с ограниченным интервалом управляемой переменной ymin ... ymax
Если контур управления работает только вблизи определенной рабочей точки, реакцию контура в этом интервале можно счесть фактически идеальной, то есть считать линейной, а нелинейности можно игнорировать, то есть заменить линейными приближениями (линеаризация вокруг рабочей точки). Однако при наличии отклонений от этой рабочей точки (например, при подаче последовательного ступенчатого изменения заданной переменной или управляемой переменной), этот вид нелинейности может иметь критическое влияние на реакцию контура управления (обычно отрицательное).
Влияние типичных нелинейностей на реакции линейных контуров управления рассматривается на практических занятиях.
2. Изменяющаяся внешняя среда.
Пример 1. Динамика самолёта.
Он ведёт себя по-разному на малых и больших высотах (зависимость от плотности воздуха ρ). Реакция на движение закрылков сильнее на низких высотах, где плотность больше. Автопилот должен учитывать высоту и другие параметры, чтобы управлять самолётом.