

5 Приложения технологии автоматического управления
Системы управления являются жизненно необходимыми компонентами во многих технических устройствах и системах.
Автомобильная промышленность - только одна типичная область в числе многих. Современные транспортные средства наполнены компонентами из области автоматизации. Возможно одна из самых известных среди них – Антиблокировочная тормозная система (АТС).
Современные гоночные автомобили Формулы 1 оборудованы электронной системой контроля запуска, которая надежно препятствует вращению колес во время старта.

Рис. 6 Гоночный автомобиль Формулы 1
Даже за пределами области технологии Вы всюду можете обнаружить системы, которые работают по принципам технологии обратной связи. Они включают биологические, экономические или даже социальные системы, напоминающие по структуре системы автоматического управления.
Управление процессом занимается архитектурой, механизмы и алгоритмы для поддержания выходного значения конкретного процесса в рамках желаемого диапазона.
Управление процессом широко используются в промышленности непрерывных процессов, таких как нефтепереработка, производство бумаги, химическая, электростанции и многих других отраслях. Управление процессами позволяет автоматизировать процессы так, что небольшой штат обслуживающего персонала может управлять сложным процессом из центральной диспетчерской.
Например, нагрев до температуры в помещении - это процесс, который имеет конкретные желаемые результаты для достижения и поддержания определенной температуры (например, 20 ° С), поддерживая её постоянной с течением времени. Здесь температура – контролируемая (управляемая) переменная. В то же время, это входная переменная, так как она измеряется термометром и используются для определения того, нагрето или нет. Желаемая температура (20 ° С) - это уставка.
Состояние нагревателя (например, установка клапана горячей воды) называется управляющей переменной, поскольку она осуществляет управляющее действие.
6 Классификация элементов автоматики
Элементы автоматики чрезвычайно разнообразны по конструкции, принципам действия, характеристикам, физической природой преобразуемых сигналов, функциям, выполняемым в устройства автоматического управления. В зависимости от того, как элементы получают энергию, необходимую для преобразования входных сигналов, они делятся на пассивные и активные.
Пассивные элементы — это такие элементы, у которых входное воздействие (сигнал) х преобразуется в выходное воздействие (сигнал) у за счет энергии входного сигнала (например, это редуктор в механической системе). Активные элементы — это такие элементы, которые получают энергию от вспомогательного источника (например, это усилители, двигатели).
В зависимости от вида энергии на входе и на выходе элементов последние делятся на электрические, гидравлические, пневматические, механические и комбинированные.
По выполняемым функциям элементы автоматики делятся над датчики, усилители, исполнительные устройства, реле, вычислительные элементы, согласующие и вспомогательные элементы и т. д.
Датчики
Воспринимающие элементы или первичные преобразователи (датчики) измеряют управляемые величины технологических процессов и преобразуют их.
Датчики воспринимают поступающую на их вход информацию об управляемой величине ОУ и преобразуют ее в форму, удобную для дальнейшего использования в устройстве автоматического управления. Большинство датчиков преобразуют входной неэлектрический сигнал х в электрический сигнал у.
В зависимости от вида неэлектрического входного сигнала датчики делятся на датчики механических величин (перемещение, скорость, ускорение), тепловых величин, оптических величин и др. Нередко применяются датчики с двойным преобразованием: входной сигнал преобразуется сначала в перемещение, а затем перемещение в электрический сигнал.
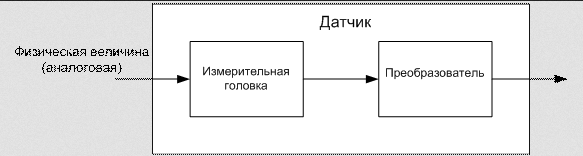
Рис. 6 Составные элементы датчика
Измерительное устройство или датчик состоит из двух частей – измерительной головки и преобразователя, выходной сигнал датчика есть выходной сигнал преобразователя. В большинстве управляющих систем этот выходной сигнал обычно – и предпочтительно – электрический. Главное достоинство электрических датчиков – это гибкость и разнообразие способов обработки сигнала, особенно то что электрический сигнал можно передавать на большие расстояния с очень малыми затратами энергии.
Выходной аналоговый сигнал электронного блока 4...20 мА, что соответствует международному стандарту IEC 61381. Для передачи сигнала на значительное расстояние используется не напряжение, а ток, потому что он остается постоянным по длине кабеля, а напряжение падает из-за сопротивления кабеля. В конце линии связи токовый сигнал можно преобразовать в напряжение с помощью высокоточного шунтирующего резистора. При постоянном токе и идеальной изоляции сопротивление кабеля не влияет на сигнал, т.е. величина тока на входе приемника - обрабатывающей схемы - такая же, как на выходе источника сигнала. При переменном токе влияние емкостного эффекта становится заметным и часть тока будет теряться по длине кабеля, уходя либо в обратный провод, либо в заземленный экран. Минимальный уровень сигнала определен как 4 мА, чтобы можно было обнаружить разрыв цепи (0 мА).