

Время преобразования
Преобразование А/Д происходит не немедленно, хотя есть время τ преобразования порядка нс. В большинстве промышленных цифровых систем есть вероятность электрического шума от локальных АС сетей (50 Гц). Она даёт время преобразования 20 мс для 50 Гц.
7 Цифровая фильтрация аналоговых сигналов
Промышленные системы сбора данных и системы управления используют информацию, полученную от датчиков, для выработки соответствующих сигналов обратной связи, которые, в свою очередь, непосредственно управляют промышленными процессами.
В некоторых случаях в сигнале, содержащем информацию, присутствует шум, и основной целью является восстановление сигнала. Выделение сигнала из шума (фильтрация, автокорреляция, свертка) часто используются для выполнения этой задачи и в аналоговой, и в цифровой областях.
Цифровая фильтрация представляет собой один из методов защиты измерительных каналов оборудования от воздействия электромагнитных помех, шумов и наводок.
Фильтр аналоговых входов
Фильтр аналогового входа обеспечивает стабильность аналоговых значений. Фильтр аналогового входа следует активизировать в приложениях, в которых входной сигнал медленно меняется с течением времени. Если речь идет о быстро меняющемся сигнале, то аналоговый фильтр активизировать не следует.
Не рекомендуется применять аналоговый фильтр у модулей, которые передают цифровые данные или сигналы тревоги. Аналоговый фильтр для ведущих модулей с RTD, термопарами и AS–интерфейсом должен быть всегда выключен.
PV фильтр. Фильтр 1 порядка на входной сигнал позволяет уменьшить некоторый шум. Фильтр 1 порядка выражается обыкновенным дифференциальным уравнением. Т – постоянная фильтра для фильтра 1 порядка.
![]()
де х-входной сигнал (с аналогового датчика процесса), y -выходной сигнал – отфильтрованный сигнал, Т – постоянная фильтра.
Величины считываются дискретно на интервале выборки . Мы имеем последовательность выборок входов xn, x n-1, x n-2 и последовательность выборок выходов y n, y n-1 , и т.д.
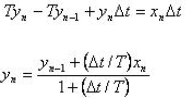
Тогда аппроксимируем:
![]()
Преобразуя, получаем:
Время выборки должно быть постоянным.
Входной сигнал с шумом дискретизируется при постояном интервале (обычно 0,1 до 5 с).
Пример
Для шагового ответа в нефильтрованном входе фильтр с временем выборки = 0,5 с и коэффициентом 0,1 даёт 10 выборок, чтобы достигнуть 66 % конечной величины, дающей постоянную времени примерно 5с. Надо точно выбрать и коэффициент фильтра. Обычно время фильтра больше, чем время выборки.
![]()
Если очень маленькое, нагрузка на память процессора. Если маленькая величина, то скорость выборки очень быстрая. Типично =0,1 до 5 с и коэффициент фильтра 0.01 до 0.1.
ЛЕКЦИЯ 6.
1 Цифровая система управления
Применение компьютера и контролера в управлении процессом. Дискретные системы. Основная структура системы цифрового управления процессом. Представление цифрового результата измерений. Передача результатов измерений в цифровых измерительных системах. Передача сигналов в автоматике. Стандарты коммуникации. Система полевых шин. Протоколы. Коммуникации для технологического процесса. Среда передачи данных.
Информация — важнейший компонент управления физическими процессами, поскольку она позволяет лучше использовать два других слагаемых процесса — материю и энергию. Учитывая глобальнейшие проблемы, связанные с производственной деятельностью (истощение природных ресурсов, отходы и загрязнение окружающей среды), большой интерес представляет любое повышение эффективности процесса и снижение побочных эффектов. Обработка информации, улучшающая характеристики технического процесса, выгодна в любом случае.
Измерение характеризуется объективностью, так как выполняется при помощи специально предназначенных для этой цели технических средств (средств измерений).
В настоящее время управляющие компьютеры и PLC предназначены для обработки информации, и относятся к техническим средствам измерений. В большинстве случаев компьютеры и PLC выполняют две основные функции: во-первых, контролируют, находятся ли параметры технического процесса в заданных пределах, и, во-вторых, инициируют соответствующие управляющие воздействия, чтобы параметры оставались в этих пределах даже при наличии внешних возмущений.
Современные измерительные системы используют в своей основе новейшие технологии обработки измерительной информации, представленной в виде рациональных чисел известной точности, с применением вычислительных машинных алгоритмов арифметики ограниченной точности.