

Устройство обработки сигнала
Разрешение (Resolution)
Термин «разрешение» (resolution) используется для наименьшего изменения в аналоговом напряжении, которое будет вызывать изменение в 1 бит на дигитальном выходе АDC.
АDC преобразует непрерывно меняющийся аналоговый сигнал в дигитальную форму. С помощью такого 8- битового преобразователя можно получить различных дигитальных величин от 00000000 до 11111111, т.е. 255.
В 8-битовом АDC, если полная шкала входного сигнала меняется между 0 и +10 В, шаг одного бита будет
![]()
Это означает, что 0,03 В на аналоговом входе АDC не могут вызвать изменения дигитального выхода. Число битов на выходе АDC определяет «разрешение» или точность. Если 10-битовый АDC, то возможно использовать различных дигитальных величин и для полной шкалы аналогового входа от 0 до 10 В. Шаг одного бита соответствует изменению
![]()
Если 12-битовый АDC, то число дигитальных величин и для шкалы от 0 до 10 В один бит соответствует изменению аналогового сигнала на 10/4095, т.е. 2,4 мВ.
![]()
В общем случае «разрешение» n -битового АDC:
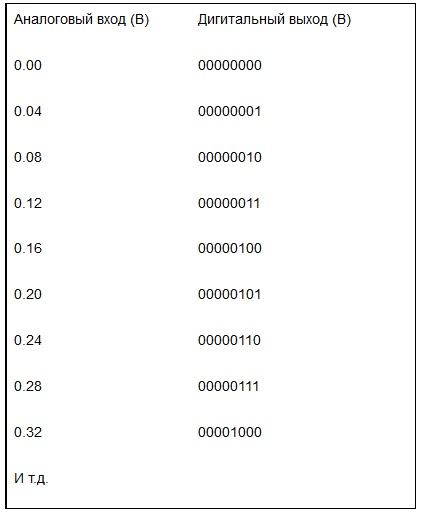
Таблица показывает аналогово-цифровое преобразование 8-битового преобразователя, когда входной сигнал меняется от 0 до 10 В.
Таблица 1
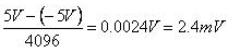
Полная шкала измерений:от -5 до+ 5 Вольт
ADC разрешение 12 бит:
Если разрешение 16 bits, ADC даёт 65 536 дискретных величин.
Это преобразование сопровождается потерей разрешения, которое зависит от числа бит.
Таблица 2
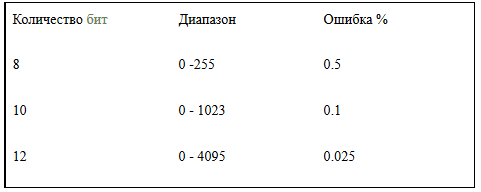
Большинство промышленных датчиков имеют точность лучше, чем 0.1% (таблица 3) и 12-ти битовый преобразование будет добавлять маленькую ошибку в большинстве случаев.
Таблица 3

Пример:
Термопара даёт на выход 0.5 мВ на каждый ˚С. Какова будет точность (разрешение), с которым PLC будет считывать измеренное значение, если термопара подсоединена к аналоговому входу с пределами измерения 0 – 10 В постоянного тока и используется 10-битовый АDC?
Решение.
Диапазон 0 – 10 В соответствует битам. Это вся шкала 0 – 10 В. Изменение в 1 бит соответствует или 10 мВ. Т.е. точность, с которой PLC распознает вход от термопары, есть ±5 мВ или ±10˚С.
АDC преобразование сопровождается потерей в разрешении, которая зависит от числа битов.
Пример.
8-ми битовый байт представляет Integer в пределе 0 – 255. Если измеряемый сигнал с датчика (например, расхода) лежит в пределах 0–1800 л/мин, один бит представляет примерно 7 л/мин (1800/255). Это означает, что расход 138 л/мин не может обрабатываться 8-ми битовой системой, (от 134 л/мин она перепрыгнет к 141 л/мин).
Эти вычисления должны быть закончены в пределах интервала дискретизации 1/fs, чтобы обеспечить работу в реальном масштабе времени. В этом примере частота дискретизации равна 10 кГц, поэтому для обработки достаточно 100 мкс, если не требуется производить существенных дополнительных вычислений.
5 Масштабирование
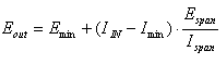
Аналоговые величины могут быть преобразованы в физические величины, например, инженерные единицы (EU), такие как 0С, использованием функции или блока линеаризации.
Как преобразовать входной аналоговый сигнал в инженерные единицы?
Пусть мы имеем 4-20мА сигнал от температурного преобразователя с диапазоном 800 – 1500 0С. Он подсоединяется через 250 Ом резистор к аналоговому модулю с 0 – 10В пределами. Аналоговый модуль даёт 12 бит разрешение, читая от 0 до 4095. Аналоговый сигнал температуры во входном модуле будет от 1 до 5В:
(4*10-3 А*250 Ом=1000*10-3 =1В) и даёт для числа от 410 до 2048. Рассмотрим график:
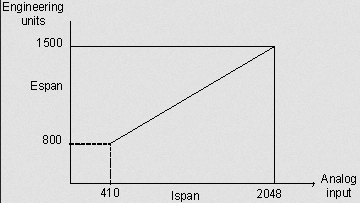
Рис. 2 Преобразование входного аналогового сигнала в инженерные единицы
Диапазон инженерных единиц: 800 – 1500 – это характеристика датчика
Еspan = 700 - полная шкала инжеренерных единиц
Ispan = (2048 - 410) =1638 - полный диапазон аналогового входа. Если входной сигнал на входе модуля IIN , Imin – минимальный сигнал на входном модуле (410)
Е min - минимальный входной сигнал в инженерных единицах (800)
Наклон
м.б. рассчитан
 ,
это постоянная величина.
,
это постоянная величина.