

3 Стандарты на аналоговые сигналы
Для аналоговых сигналов наиболее распространены стандартные диапазоны постоянного напряжения -10..+10В и 0..+10В и постоянного тока 0..20мА и 4..20мА. Теоретически нет ограничений на эти сигналы.
В цифровых системах аналоговый сигнал преобразуется в дигитальный. После вычисления управляющего воздействия в микропроцессоре PLC дигитальная величина преобразуется обратно в аналоговую.
Входные сигналы от датчиков очень различны – от нескольких мВ (термопары) до сотен В (тахометры). Есть величины постоянного тока, переменного, и даже сопротивление.
Сигнал от сенсора преобразуется преобразователем в стандартный и подаётся на вход аналогового модуля.
Аналоговые сигналы - низкого уровня и поэтому подвержены электрической интерференции или шуму. Сигнал, представленный электрическим током, меньше подвержен шумам, поэтому обычно используется токовая цепь. Ток может быть преобразован в напряжение на балластном резисторе 250 Ом.
Общий стандарт – аналоговый сигнал представлен как ток в пределах 4 – 20 мА, где 4 – низкий уровень сигнала и 20мА – высокий уровень сигнала.
Пример
Датчик давления даёт сигнал 4 – 20 мА, представляющий диапазон 0 – 10 бар. Рассчитать, какой ток соответствует измеряемому давлению 8 бар. Какое напряжение на балластном резисторе 250 Ом соответствует этому измеряемому давлению? По формуле
![]()
находим ток и затем напряжение по закону Ома.
Смещение 4мА (offset) в качестве «0» имеет следующие цели:
а) Защита от повреждения датчика или кабеля. Если датчик не работает или кабель поврежден, или к.з., то тока через балластный резистор нет и напряжение на нём «0». Это может быть определено и использовано, напрмер, для выдачи тревоги «отказ датчика».
в) Смещение 4мА ещё просто инсталлировать. Предполагается, что датчик имеет локальный источник питания и питается токовым сигналом. Но проще и чаще применяется 2-х проводное соединение. Здесь источник питания (24 – 30В) вмонтирован локально в принимающий прибор. И линия сигнала служит и для для питания датчика, и для передачи тока. Датчик получает ток 4 – 20 мА от источника согласно измеряемому сигналу. Ток преобразуется в напряжение на резисторе. 4мА – это ток, необходимый датчику для сохранения работы. Датчик с 0 –20 мА не может работать так.
4 Преобразование аналоговых величин в дигитальные. Оцифровка выходов датчиков Дискретизация сигналов. Преобразование аналоговых и цифровых сигналов. Обработка измерительной информации
Прежде чем оцифровывать аналоговый сигнал, необходимо убедиться, что он содержит только частоты, непосредственно относящиеся к измерению, и что все посторонние или нежелательные частотные составляющие, например, высокочастотные шумы, исключены или подавлены. Для этой цели спользуются аналоговые фильтры.
Для извлечения из сигнала полезной информации после АЦ-преобразования используются цифровые фильтры. С помошью цифровой фильтрации можно уменьшить посторонние составляющие входного сигнала.
A/D преобразователь преобразовывает непрерывный аналоговый сигнал в последовательность двоичных чисел.
Характеристики A/D:
Разрешение. Чем больше бит, тем точнее преобразование и тем больше разрешение, потому что больше величин данного аналогового сигнала м.б. представлено.
Время преобразования - время от микросек до миллисекунд
Ошибка квантования - изменение величины аналогового сигнала в течение времени квантования (рис.1).
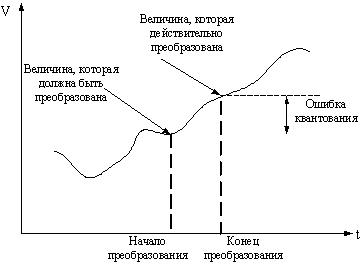
Рис.1 Преобразование аналоговых сигналов