

5 Обозначения элементов систем автоматики (средств автоматизации)
Буквенные обозначения средств автоматизации строятся на основе латинского алфавита и состоят из трех групп букв:
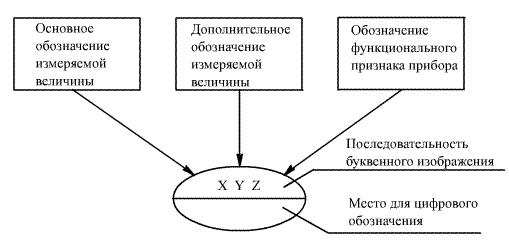
Рис. 9 Последовательность буквенных обозначений
Последовательность слева направо:
Обозначение основной измеряемой величины;
Обозначение, дополнительное (уточняющее основную) измеряемую величину;<
Обозначение функционального признака прибора.
Пример

Прибор для измерения температуры регистрирующий, регулирующий, установленный на щите (термометр манометрический, милливольтметр, и т.д.).
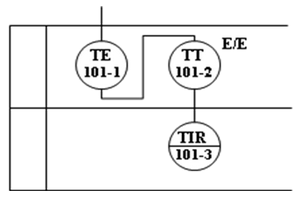
Индикация и регистрация температуры (TIR)
Рис. 10 Обозначения элементов систем автоматики
ЛЕКЦИЯ 5.
1 Обработка сигналов
Виды сигналов. Цифровые сигналы. Дискретизация аналоговых сигналов. Мультиплексирование и АЦ-преобразование измерительной информации. Преобразование аналоговых сигналов и цифровых. Аналого-цифровое преобразование. Цифро-аналоговое преобразование. Определение интервала дискретизации. Критерий Shannon-Nyquist. Точность. Аналоговая фильтрация.
Виды сигналов
Сигнал определяется как напряжение или ток, который может быть передан как сообщение или как информация. По своей природе все сигналы являются аналоговыми, будь то сигнал постоянного или переменного тока, цифровой или импульсный. Тем не менее, принято делать различие между аналоговыми и цифровыми сигналами.
2 Преобразование сигналов датчиков в стандартные управляющие сигналы. Преобразователи.
Преобразователь – это интерфейс между процессом и его управляющей системой. Цель преобразователя – конвертировать входной сигнал датчика (мВ, перемещение, дифференциал давления) в управляющий сигнал, например, 4 – 20 мА, или в напряжение 0 – 10В. Динамическая характеристика (ответ на полученное возмущение) большинства преобразователей более быстрая, чем изменение процесса и управляющей величины. Изменение возмущения на входе даёт мгновенный скачок на выходе.
Сенсор, который подаёт сигнал на вход аналогового модуля, не всегда имеет имеет ткой же диапазон электрического сигнала, как входной модуль. Максимальная величина входного сигнала должна быть преобразована к максимальной величине входного модуля промежуточным преобразованием.
Преобразователь давления
Пусть включён так, что его выходной токовый сигнал изменяется от 4 – 20 мА, когда давление в ёмкости меняется в пределах 100 –1000 кПа. Это пределы измерения датчика (rangе). Вся шкала прибора – 900 кПа (span). «0» датчика – 100 кПа (zero). Преобразователь имеет возможность менять положение нуля и диапазон.
Пример: Если сдвинуть «0» на 200 кПа, то пределы будут 200 – 1100 кПа, а шкала прибора не изменится – 900 кПа.
Коэффициент передачи:
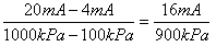
Преобразователь превращает входную величину в эквивалентный выходной сигнал.
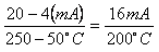
Преобразователь температуры
Принимает входной сигнал термопары; включён так, что его выход изменяется от 4 – 20 мА, в то время как температура меняется от 50 до 250° С.
Аналоговый электрический сигнал отражает уровень напряжения или тока аналогичный некоторой физической величине в каждый момент времени. Это может быть температура, давление, вес, положение, скорость, частота и т.д.
Для обработки сигналов цифровыми методами аналоговые входные сигналы обязательно подвергаются аналого-цифровому преобразованию (АЦП). В результате, образуется дискретная переменная определенной разрядности. Как правило, в промышленности (в PLC) применяются 8-12 разрядные преобразователи. Приборы с более высокой разрядностью не оправдывают себя, в первую очередь, из-за высокого уровня индустриальных помех, характерных для условий работы контроллеров.