

6 Приближенные динамические модели инерционных статических объектов управления
При решении задач автоматизации технологических процессов часто приходится иметь дело с инерционными статическими объектами управления (например, с электрическими двигателями), переходные характеристики h0(t), которых имеют специфическую s-образную форму (рис. 11). Наклон, кривизна характеристики и ее расстояние от оси ординат зависят от динамических свойств конкретного объекта.
Параметры T0 и τ0 определяют проведением касательной АВ к наиболее крутому участку переходной характеристики h0(t).
При расчете настроечных параметров АСУ с объектами, имеющими s-образные переходные характеристики, ориентируются либо непосредственно на параметры k0 , T0 , τ, которые обобщенно (но не полно!) характеризуют статику и динамику реального объекта, либо используют упрощенные модели объекта, коэффициенты которых однозначно выражаются через указанные экспериментальные параметры.
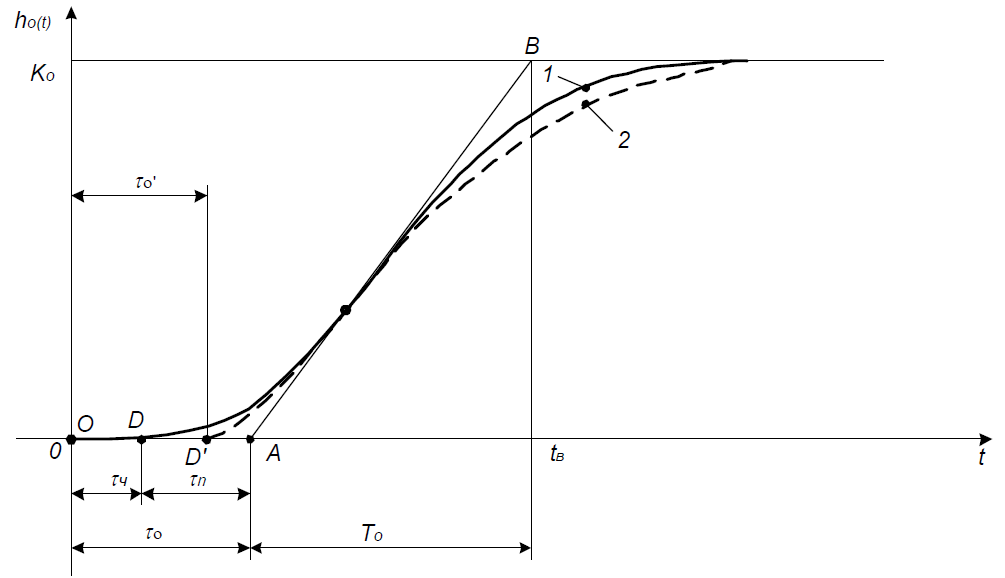 Рис.
11 Переходная характеристика h0(t)
специфической
s-образной
формы
Рис.
11 Переходная характеристика h0(t)
специфической
s-образной
формы
Для практических расчетов АСУ такими объектами каждую s-образную кривую, снятую при единичном ступенчатом воздействии, достаточно охарактеризовать следующими параметрами, определяемыми непосредственно по графику:
передаточным коэффициентом k0;
постоянной времени T0;
полным запаздыванием τ0, которое складывается из чистого запаздывания τч и переходного запаздывания τп , т. е. τ0 = τч + τп
7 Классификация типовых динамических звеньев
Звеном системы называется ее элемент, обладающий определенными свойствами в динамическом отношении. Звенья систем регулирования могут иметь разную физическую природу (электрические, пневматические, механические и др. звенья), но описываться одинаковыми дифференциальными уравнениями, а соотношение входных и выходных сигналов в звеньях описываться одинаковыми передаточными функциями.
В теории выделяют группу простейших звеньев, которые принято называть типовыми.
Типовые звенья широко используются при определении динамических характеристик объектов управления. Например, зная переходную характеристику, часто можно определить, к какому типу звеньев относится объект управления, а следовательно, его передаточную функцию, дифференциальное уравнение и т.д., т.е. модель объекта.
Любое сложное звено может быть представлено как соединение простейших звеньев.
К простейшим типовым звеньям относятся:
усилительное,
инерционное (апериодическое 1-го порядка),
интегрирующие (реальное и идеальное),
дифференцирующие (реальное и идеальное),
апериодическое 2-го порядка,
колебательное,
запаздывающее.
1) Усилительное звено (пропорциональное)
Звено усиливает входной сигнал в К раз. Уравнение звена у = К*х, передаточная функция W(s) = К. Параметр К называется коэффициентом усиления.
Выходной сигнал такого звена в точности повторяет входной сигнал, усиленный в К раз (Рис.12). у = K.x.
Рис. 12 Выходной сигнал усилительного звена
При ступенчатом воздействии h(t) = K.
Примерами таких звеньев являются: механические передачи, датчики, безынерционные усилители и др.