

3. 2 Обработка данных
Программное обеспечение обработки данных для ЕМ 3000 доступно как от фирмы Kongsberg Simrad, так и от других производителей. Сервисные и маркетинговые организации по всему миру, имеющие многолетний опыт в области использования многолучевых эхолотов, поддерживают систему ЕМ3000.
Высокое качество данных, получаемое при использовании многолучевых эхолотов фирмы
Kongsberg Simrad, представляет прекрасную основу для выполнения полного описания морского дна в форме карт, трехмерных изображений, комбинированных батиметрических и гидролокационных изображений, классификации морского дна и т.д. В поставку может быть включен полный набор программных продуктов для предварительной камеральной обработки данных многолучевого эхолота, однако, поскольку форматы данных являются открытыми то могут быть легко написаны и конверторы для других программных систем.
Кроме этого, весьма эффективным является специализированное картографическое программное обеспечение IRAP производства фирмы Roxar, предназначенное для получения отчетных планшетов. Вывод результатов обработки производится на цветной растровый прокладчик со встроенным интерпретатором языка Post Script.
Программное обеспечение Neptune фирмы Kongsberg Simrad используется для камеральной обработки результатов съемки. Этот программный пакет состоит из модулей отбраковки и фильтрации данных координирования, анализа и исправления глубин, ввода поправок за уровень, автоматической фильтрации глубин, основанной на комбинациях статистических правил, перерасчета глубин с использованием нового профиля скорости звука в воде. Предусмотрены функции ручного редактирования, контролируемого уменьшения объема данных, экспорта предварительно обработанных данных для дальнейшей обработки и распечатки рабочих планшетов на цветном струйном плоттере.
Программное обеспечение IRAP фирмы Roxar используется для окончательной камеральной обработки результатов съемки. Этот программный пакет состоит из модулей расчета регулярной сети, построения и вывода изобат, вывода глубин, создания зарамочного оформления, расчета объемов для дноуглубления, построения профилей дна по произволь-ным направлениям.
3. 3 Прокладчик
Для выводов результатов предварительной обработки и контроля качества в систему, обеспечивающую работу многолучевого эхолота может быть включен растровый цветной прокладчик. При эксплуатации на промерном катере д ля облегчения транспортировки рекомендуетсям прокладчик размера А3 со встроенным интерпретатором языка Post Script производства фирмы Hewlett Packard. Такого прокладчика достаточно для получения рабочих планшетов в полевых условиях, а его вес составляет несколько килограммов. Однако по дополнительному согласованию в поставку может быть включен любой другой прокладчик формата А2,А1 или А0.
3. 4. Измеритель вертикального профиля скорости распространения звука в воде.
Необходимым условием получения качественных материалов при съемке с использованием многолучевого эхолота является точное знание профиля скорости звука в районе работ. Учитывая возможное использование системы в устьевых участках рек и в прибрежных зонах, т.е. в наиболее сложных в гидрологическом отношении районах, мы предлагаем использовать прекрасно зарекомендовавший себя измеритель «Sound velocity Smart Sensor» производства фирмы Applied Microsystems, Канада. В отличие от измерителей, выдающих температуру и соленость воды, предлагаемый измеритель работает по принципу эхолота с фиксированной известной базой, т.е. выдает непосредственно значение скорости звука. Такой измеритель не нуждается в частых поверках и калибровках, имеет маленькие габариты (45мм x 315мм) и весит 515 граммов. Для удобства выполнения работ на мелководных участках в поставку целесообразно включать два кабеля: длинной 15 м. и 50 м.
3.5. Дисплей рулевого.
На мониторе оператора имеется вся необходимая информация для удержания судна на промерном галсе, представленная в окне «дисплей рулевого». В ряде случаев компоновка судна (катера) позволяет использовать этот монитор одновременно судоводителю (рулевому) и оператору-гидрографу. Однако, в тех случаях, когда компоновка рубки не позволяет рулеому видеть дисплей, возникает необходимость использования отдельного (выносного) монитора для рулевого. Наиболее удобно использовать для этой цели стандартный персональный компьютер, а для катерного варианта использования многолучевого эхолота -портативный компьютер типа “Notebook”. На таком портативном компьютере может быть установлена операционная система Юникс или Windows, а также необходимое программное обеспечение, предоставляемое российским партнером фирмы Simrad- компанией Элком.
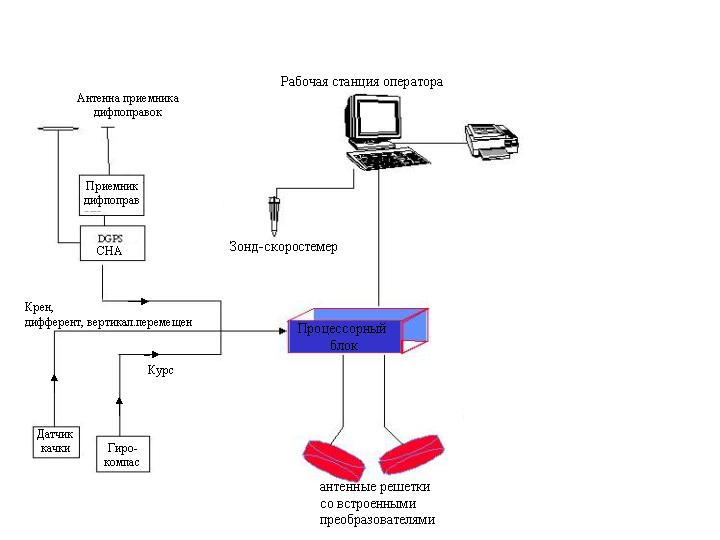
Рис.3.1 Блок схема комплекса на базе многолучевого эхолота ЕМ-3000
3.6. Интегрированная система пространственной ориентации “Seapath”.
Для получения кондиционных данных при проведении промера с многолучевым эхолотом особое значение приобретает частота обновления и точность данных о координатах и курсе судна, а также мгновенных значениях крена, дифферента и вртикального перемещения антенны эхолота под воздействием морского волнения. Обычным подходом является установка на судне спутниковой навигационной аппаратуры (СНА), гирокомпаса и «датчика качки» , построенного на механических гироскопах. В англоязычной литературе такой «датчик качки» , называемой также «гировертикаль», называется MRU (Moution Reference Unit). Имеются многочисленные марки такой аппартуры, выпускаемые несколькими зарубежными фирмами. Некоторые из этих утройств измеряют углы крена и дифферента, а также вертикальное перемещение. В этом случае многолучевой эхолот использует информа-цию о курсе от судового гирокомпаса. В новейших «датчиках качки» выполняется измере-ние всех четырех необходимых параметров (курс,крен, дифферента ивертикальное переме-щение). Отметим, что при промере с многолучевым эхолотом необходимо с высокой точ-ностью знать мгновенные значения именно курса (направления диаметральной плоскости)
судна с которым связаны оси излучающих антенн. Это обстоятельство не позволяет исполь-зовать в многолучевой съемке значения «курса» (путевого угла), который вырабатывает СНА. Использование в гидрографическом комплексе обычного судового гирокомпаса также вызывает некоторые трцдности ввиду его невысокой точности, особенно после маневрирова-ния. На катерах использование гирокомпасов еще больше затрудняется. Малогабаритные гирокомпасы не обладают необходимой точность для обеспечения многолучевого эхолота. К тому же интенсивное маневрировании на таком динамическом объекте, как малотоннаж-ный катер, способно вывести гирокомпас из меридиана. Прецезионные гирокомпасы непреемлемы для небольших плавсредств ввиду того, что имеют значительные весо-габаритные характеристики, затрудняющие их транспортировку и маневренную установку.
Прецезионная механика весьма чувствительна к ударам и вибрации. Время от запуска гирокомпаса до выхода в рабочий режим обычно составляет несколько часов. Существенна широтная погрешность в высоких широтах, а также скоростная погрешность. В результате суммарная погрешность на промере , возникающая при переходах с галса на галс (поворот на 180º) ведет к заметному снижению точности многолучевой съемки рельефа. То же самое можно сказать и о «датчике качке», выполненном на механических гироскопах. Высокое качество съемки обеспечивается только на длинных прямолинейных галсах. После очеред-ного разворота на 180º(переход на новый галс)при скорости 6 узлов значение вертикального перемещения судна может содержать погрешность до 0.5 м. в течении 5-6 минут. Все это может значительно затруднить промер на стесненной акватории и в у зкостях, особенно на маломерном высокоманевренном плавсредстве.
Всех вышеуказанных недостатков лишена интегрированная система пространственной ориентации “Seapath 200”, являющаяся уникальной разработкой фирмы Seatex. Эта система специально разработана для совместного использования с многолучевыми эхолотами, системами динамического позиционирования и навигационными гидроакустическими системами.
Интегрированная система пространственной ориентации “Seapath 200” в реальном масштабе времени вырабатывает значения курса, координат, вертикального перемещения , а также углов крена и дифферента. Это достигается интегрированием двух независимых технологий: СНА и встроенного «датчика качки». Ядром системы является процессорный блок, содержа-щий вычиситель со специализированной программой, реализующий фильтр Калмана, два приемника СНА специальный MRU, а также интерфейсы RS232\422 и блок питания. Устройство размещено в стандартном корпусе с возможностью установки в стандартную стойку и весит 9 кг. В процессорный блок вводятся данные дифференциальных поправок в формате RTCM 104 от внешнего приемника . Измерение курса производится с использова-нием информации от интегрированного в систему датчика качки MRU5 и информации о фазе несущей от двух двенадцатиканальных приемников GPS с антеннами, разнесенными на 2.5 м.. Измерение мгновенных значений углов крена и дифферента возможно практически при любых условиях. Это обусловлено использованием данных о скорости, получаемых от GPS для компенсации горизонтальных ускорений. Координаты и скорость судна вычисля-ются по данным измерений псевдодальностей до навигационных спутников с использова-нием сглаженной фазы несущей и доплеровского сдвига частоты. Данные корректируются поправкамиза вертикальную скорость и вертикальное перемещение, получаемые от MRU5. Интегрирование всей информации с использованием фильта позво-ляет вести постоянный мониторинг качества координирования с учетом возможного пропадания сигналов от отдельных навигационных спутников, ухудшения качества геометрии пространственной спутниковой засечки(PDOP), а также возникновения недопустимой разницы результатов, выдаваемых MRU5 и GPS. Такой постоянный контроль невозможен при использовании любой из перечисленных систем в отдельности. С другой стороны, при кратковременном пропадании сигналов от навигационных спутников система способна длительное время выдавать достаточно точные координаты и данные пространственной ориентации от MRU5 на прямом курсе.
Интегрированная система пространственной ориентации “Seapath 200”имеет следующие точностные характеристики:
- СКП измерения курса 0.075º;
- СКП измерения крена\дифферента 0.03º;
- СКП измерения амплитуды качки 0.05 м.;
- удвоенная СКП координат в дифференциальном режиме
(при наличии внешнего источника) 2 м.
Таким образом, характеристики системы“Seapath 200” удовлетворяют требованиям съемки особой категории в соответствии с стандартом SP-44 (редакция 4).
Кроме всех перечисленных положительных сторон “Seapath 200” у этой системы есть еще одно важное достоинство. Все вышеперечисленные параметры строго синхронизированны по времени и поступают на выход с частотой 100 Гц, что согласовано с возможностями устройства управления ЕМ3000. Это позволяет минимизировать и упростить, а то и исключить тнтерполяцию углов качки, вертикальных перемещений и координат для каждой индивидуальной посылки, что улучшает суммарную точность системы.