

Глава 2. Исследования и калибровка многолучевого эхолота.
Гидрографический комплекс с ЭМЛ является сложной системой взаимосвязанной аппаратуры,
установленной на судне-носителе, которое постоянно перемещается под воздействием внешних факторов морской среды. Поэтому для получения качественных результатов многолучевой съемки необходимо постоянно выполнять исследования гидрографического комплекса и контролировать величины систематических погрешностей, свойственных многолучевой батиметрии.
Для получения вероятнейших расчетных значений точек глубин на морском дне и их координат необходимо как можно более точно определять следующие исходные параметры:
- географические (геодезические) координаты излучающей антенны ЭМЛ в момент посылки;
-углы пространственной ориентации антенн в момент посылки и приема акустических сигналов;
-высотное положение антенны ЭМЛ относительно принятого нуля глубин;
- пространственно-временное распределение скорости звука в водной толще в районе съемки.
Рассмотрим возможности определения этих параметров более подробно.
2.1. Состав параметров, измеряемых при многолучевой батиметрии.
2.1.1. Географические координаты излучающей антенны ЭМЛ.
С помощью спутниковой навигационной аппаратуры (СНА) определяются криволинейные географические координаты приемной антенны (B,L,H). Необходимо выполнить «приведение» (offset) для расчета координат антенны ЭМЛ. Для этого необходимо точно знать элементы приведения в судовой системе координат. Начало судовой системы координат, как правило, располагают в центре тяжести корпуса судна., ось X лежит в диаметральной плоскости и параллельная плоскости главной палубы, ось Y лежит в плоскости, параллельной плоскости мидельшпангоута и параллельна плоскости главной палубы, а ось Z направлена вертикально вверх.

Рис.4.1. Судовая система координат.
Для упрощения последующих рассуждений будем считать, что центр тяжести судна лежит в плоскости мидельшпангоута (миделя), тогда получим судовую систему координат, изображенную на рис.2.1.
В варианте использования режима DGPS необходимо использовать только плоские элементы приведения dXg и dYg (м.). При этом географические координаты антенны ЭМЛ (Bm, L m ) с достаточной точностью могут быть вычислены по следующим формулам:
Bm = Bg + (dXg+dXm) / M (2.1.)
L m = Lg + (dYg+dYm) / N*cosB.
Где N – радиус кривизны первого меридиана эллипсоида WGS84 (м)
M- радиус кривизны первого вертикала эллипсоида WGS84 (м)/
При пользовании формулами (2.1.) необходимо иметь ввиду, что величина dXg является положительной, а dXm – отрицательной (направлена в корму), аналогично величина dYg- отрицательна, а dYm- положительна (направлена в правый борт).
В варианте использования фазовой спутниковой аппаратуры реального времени RTK, способной с высокой точность измерять геодезическую высоту антенны, необходимо дополнительно определять вертикальное расстояние (dZg) между фазовым центром спутниковой антенны и антенны ЭМЛ.
2.1.2. -Углы пространственной ориентации антенн в момент посылки и приема сигнала
Пространственное положение антенны ЭМЛ определяется тремя эйлеровыми углами:
α (alfa) - угол дифферента(pitch);
β (beta) - угол крена (roll);
γ (gamma)- угол рыскания (yaw).
На рис.2.1. положительные направления измерения указанных углов показаны стрелками.
Мгновенные значения углов крена и дифферента измеряются гироскопическими приборами, называемыми «гировертикали». В англоязычной литературе данные приборы называются:
«Vertical referency unit (VRU)» или «moution reference unit (MRU)».
Так например, наиболее распространенная импортная аппаратура VRU серии TSS 335B данного назначения осуществляет измерение углов крена, дифферента, а также вертикального перемещения (о чем речь пойдет ниже). Для измерения рыскания в этом случае используется судовой гирокомпас. Отечественная аппаратура аналогичного назначения измеряет мгновенные значения углов крена, дифферента и курса. При этом возникает необходимость использования в составе промерного комплекса дополнительного гироскопического датчика вертикальных перемещений.
Современная импортная аппаратура MRU-6 измеряет все четыре параметра: углы крена, дифферента, вертикальное перемещение, а также угол рыскания.
2.1.3. Высотное положение антенны ЭМЛ относительно принятого нуля глубин.
При использовании варианта СНА в режиме DGPS глубины измеряются от мгновенного уровня моря, которое практически всегда является поверхностью подверженной волновому возмущению. Для того, чтобы зафиксировать мгновенный уровень необходимо с требуемой точностью
выполнять измерения высоты мгновенного уровня на уровенном посту, а также точно знать высоту плоскости нуля глубин в принятой при производстве промера высотной системе. В англоязычной литературе эти величины именуются «tide».
При выполнении высокоточной съемки с ЭМЛ в мелководном море необходимо дополнительно учитывать поправку, компенсирующую вертикальное перемещение антенны под воздействием регулярного волнения (heave). Для вычисления данной поправки, как правило, используется гироскопическое устройство- датчик вертикального перемещения. Величина поправки вычисляется на определенном временном интервале методом »скользящего окна».
2.1.4. Пространственно-временное распределение скорости звука в водной толще в районе.
Точное измерение параметров распределение скорости звука в водной толще является непременным условием для применения ЭМЛ. Кроме того, необходимо контролировать простран- ственное и временное распределение скорости звука для того, чтобы определить частоту зондирований водной толщи. Изменения скорости звука с глубиной приводит к рефракции звуковых лучей. Разработаны специальные алгоритмы, позволяющие на основе информации о скорости звука на разных глубинах возможно рассчитать уточненные координаты касания лучей поверхности дна и исправленные глубины
Калибровка ЭМЛ направлена на определение следующих систематических ошибок:
взаимного углового положения приемной антенны и датчиков, измеряющих: углы крена, дифферента и рыскания; в англоязычной литературе они называются «attitude errors»,
временной синхронизации посылки ЭМЛ и выработки координат СНА; а англоязычной технической литературе они называются: «timing errors».
При этом предполагается, что поправки за уровень (tide) и вертикальные перемещения (heave), а также параметры распределения скорости звука в воде измерены максимально точно.
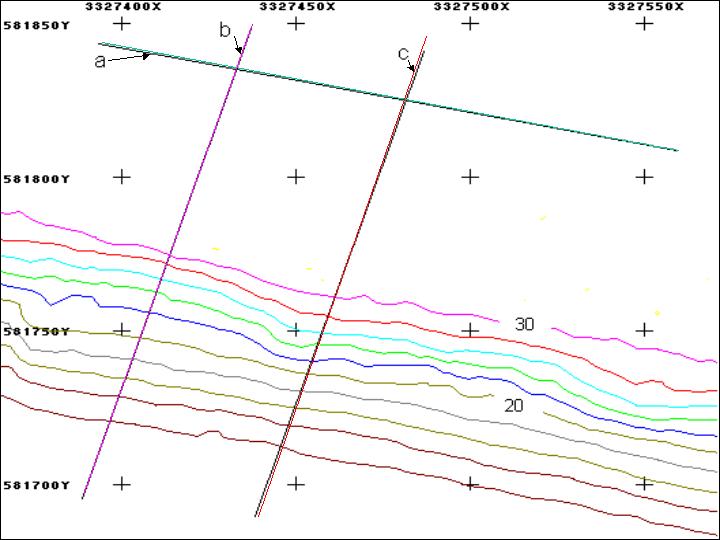
Рис. 2.2. Морской полигон для калибровки многолучевого эхолота
Для выполнения комплексной калибровки ЭМЛ на акватории, близкой к району съемки, выбирается специальный калибровочный полигон, который в случае использования мелководного ЭМЛ должен удовлетворять следующим требованиям (рис.2.2.).
На полигоне должны находиться участки морского дна:
А) с практически ровным дном на максимальных глубинах, которые могут встретиться
при проведении самой съемки;
Б) с ровным склоном, имеющим уклон 15 – 20%, при этом желательно, чтобы прямоли
нейные изобаты имели бы длину, по крайней мере не меньшую двум полосам обзора
ЭМЛ;
На полигоне не должно быть препятствий для прокладки не менее трех калибровочных галсов (см. рис.2.2. – галсы a,b,c) при этом должны соблюдаться следующие условия:
А).Рабочая длинна галсов «а b,c» должна быть не менее 150 м.
Б) Расстояние между галсами «b» и »c» должно быть таким, чтобы полосы обзора пере
крывались бы в самой мелководной части полигона ( необходимо помнить, что чем
меньше глубина по вертикальному лучу– тем ужа полоса обзора ЭМЛ)
При проведении калибровки должны выполняться следующие условия:
1. Скорости судна при проведении калибровки может изменяться от самой малой до обычной скорости промера с ЭМЛ.
2. Для калибровки целесообразно выбирать наиболее благоприятные погодные условия с минимальным волнением.
3. Определение планового положения при проведении калибровки необходимо выполнять наиболее точным из возможных методов. Желательно использованием фазовой СНА, реализующий режим кинематики реального времени (RTK).
4. Каждый вид калибровки имеет свои требования.
Требования к полигону для калибровки глубоководных ЭМЛ практически не отличаются, за исключением длины калибровочных галсов. Рекомендуемая длина галсов составляет 1000-1200 м. на глубинах 3000-4000 м. Основной проблемой при калибровке глубоководного эхолота является поиск приемлемой акватории.
Дальнейшее изложение процедуры калибровки относится к ЭМЛ с одиночной антенной. В случае двух-антенной системы процесс калибровки требует дополнительного выполнения пробегов для независимой калибровки антенн правого и левого бортов.
2.2. Причины необходимости калибровки углового положения приемной антенны ЭМЛ.
Измерения угловых пространственных координат антенны ЭМЛ становиться возможным только в том случае, когда главные пространственные оси антенны ЭМЛ и датчика пространственной ориентации точно совмещены с осями судовой системы координат (рис.2.1.).
На практике установка аппаратуры осуществляется при стоянке судна в доке. При этом обеспечивается установка горизонтальных судовых фундаментов под аппаратуру параллельно плоскости главной палубы. Установка датчика пространственной ориентации (гировертикали),
а также гирокомпаса в судовой системе координат осуществляется с помощью гиротеодолитов с высокой точностью (1-2 угловые минуты). Совмещение горизонтальных плоскостей гировертикали и антенны ЭМЛ осуществляется с помощью специальных высокоточных уровней. При этом погрешности рассогласования осей антенны и гировертикали становятся несущественными. Однако, как только судно оказывается наплаву становятся возможными деформации его корпуса, которые практически не поддаются учеты и возникает рассогласование (misalignment) пространственных осей приемной антенны и гировертикали и , следовательно, данные выдаваемые датчиком пространственной ориентации перестают адекватно характеризовать пространственное положение антенны ЭМЛ. Требуется осуществлять калибровку приемной антенны.
Другой причиной, по которой необходима калибровка, являются возможные постоянные ошибки данных, выдаваемых самой гировертикалью.
Таким образом с помощью калибровки углового положения приемной антенны ЭМЛ определяются «интегральные» систематические ошибки углов крена, дифферента и рыскания.
2.2.1. Определение систематической ошибки в угле крена (Roll Bias =beta).
На рис.2.2. изображены возможные систематические ошибки глубины, вычисленные по наклонным (боковым) лучам ЭМЛ и систематические ошибки планового положения этих глубин, получаемые в результат неучтенной систематической ошибки в угле крена.
Систематическая ошибка крена становиться наибольшей на крайних лучах ЭМЛ и неточность определения компенсирующей ее поправки становиться основным фактором, препятствующим использование информации крайних лучей для гидрографических целей.
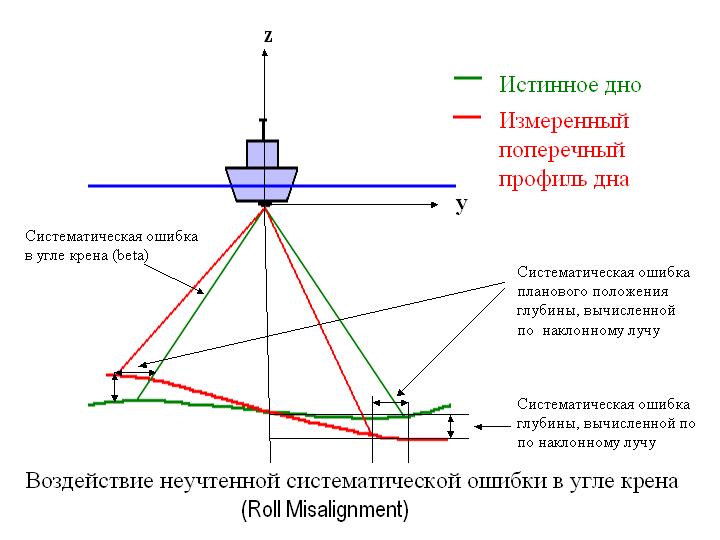
Рис.2.3. Поперечные профили вычисленных глубин, получаемый в результате
неучтенной систематической ошибки в угле крена.
Калибровка угла крена осуществляется на акватории с ровным дном и производится в следующей последовательности:
А) судно проходит по рабочему участку калибровочного галсу «а» (рис.2.2.) в прямом направле
нии с регистрацией данных промера в файл 1, а затем по рабочему участку галсу «а» в об
ратном направлении с регистрацией данных промера в файл 2.
Б) маневр разворота на обратный галс должен выполняться плавно с большим радиусом цирку-
ляции, для того, чтобы не вывести из равновесия гироскопические приборы; общая длина калибровочного галса должна включать рабочий участок (100-150 м), а также подходной участка (300-400 м.) на которых происходит ввод в рабочий режим гирокурсо-указателя и (или) гировертикали после маневра выхода на обратный галс;
В) при следовании по прямому и обратному галсу уклонения от заданной линии галса должно быть минимальным.
С) при проведении калибровки скорость судна на рабочих участках калибровочного галса долж
на быть постоянной и равномерной.
После завершения калибровка файлы 1 и 2 поступают в программное обеспечение ЭМЛ для расчета поправки, компенсирующей систематическую ошибку крена приемной антенны.
Панель программы калибровки, вычисляющей поправку за крен приемной антенны ЭМЛ, в составе гидрографической информационной системы HYPACK MAX изображена на рис.2.4.
В графическом окне «Cross Sections» представлены усредненные значения поперечного профиля вычисленных глубин, получаемые в результате неучтенной систематической ошибки в угле крена, при прохождении рабочих участков прямого (красный) и обратного (зеленый) калибровочного галсов. Если бы исходная поправка (Initial Offset) равнялась нулю, то усредненные поперечные профили пересевались под определенным углом. Задачей программы является расчет такой поправки в измеряемый гировертикалью угол крена (beta), чтобы глубины по боковым лучам , полученные на прямом и обратном галсе совпали. Графически это выглядит, как полное наложение усредненных поперечных профилей прямого (красный) и обратного (зеленый) галсов (см.рис.2.4).
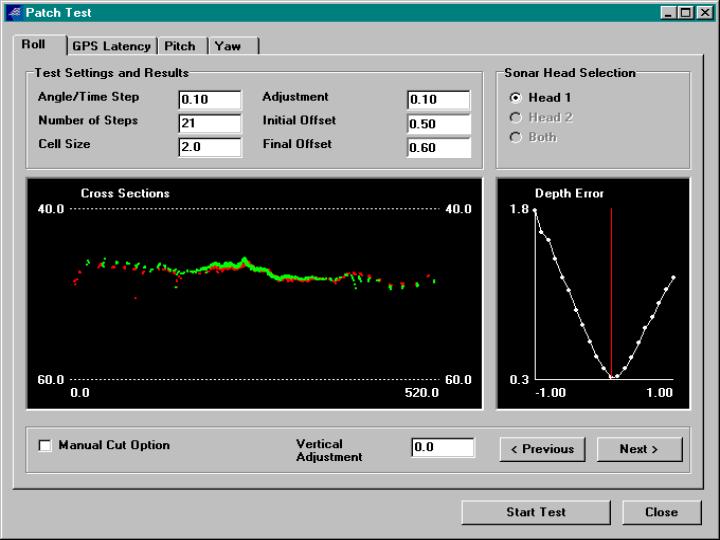
Рис.2.4. Панель программы, вычисляющей поправку за крен приемной антенны ЭМЛ
(в составе гидрографической информационной системы HYPACK MAX )
При калибровке угла крена, как правило, не ограничиваются однократным прохождением по калибровочному галсу в прямом и обратном направлении. Величину рассчитанной поправки по данным первой калибровки используют для выполнения повторной, чтобы убедится в надежности результата. На рис.2.4 представлен результат повторной калибровки (FinalOffset), который отличается от предыдущего на 0.1º.
Калибровка угла крена является наиболее ответственным этапом при подготовке к промеру с ЭМЛ, поэтому ее целесообразно выполнять как можно чаще, и во всяком случае перед началом и после завершения промера на заданной акватории. Стабильность поправки, получаемой при последовательных калибровках дает уверенность в качестве получаемых материалов много-лучевого промера.
2.2.2. Определение систематической ошибки в угле дифферента (Pitch Bias =alfa).
На рис.2.5. изображены возможные систематические ошибки глубины, вычисленные в полосе обзора по всем лучам ЭМЛ и систематические ошибки планового положения этих глубин, получаемые в результат неучтенной систематической ошибки в угле дифферента.
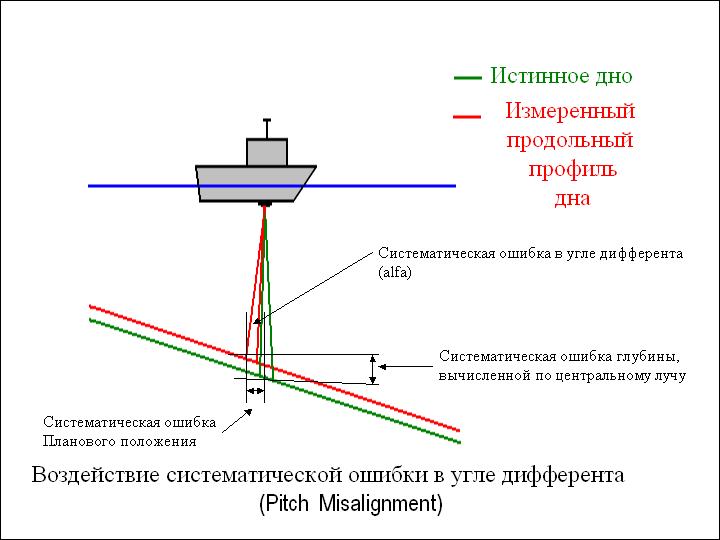
Рис.2.5. Положение полосы вычисленных глубин, получаемый в результате
неучтенной систематической ошибки в угле дифферента.
Калибровка угла дифферента осуществляется на акватории с ровным пологим дном и производится в следующей последовательности:
А) судно проходит по рабочему участку калибровочного галсу «b» (рис.2.2.) в прямом направле -нии с регистрацией данных промера в файл 1, а затем по рабочему участку галсу «b» в
обратном направлении с регистрацией данных промера в файл 2.
Б) маневр разворота на обратный галс должен выполняться плавно с большим радиусом циркуляции, для того, чтобы не вывести из равновесия гироскопические приборы; общая длина калибровочного галса должна включать рабочий участок (100-150 м), а также подходной участка (300-400 м.) на которых происходит ввод в рабочий режим гирокурсо-указателя и (или) гировертикали после маневра выхода на обратный галс;
В) при следовании по прямому и обратному галсу уклонения от заданной линии галса должно быть минимальным.
С) при проведении калибровки скорость судна на рабочих участках калибровочного галса
должна быть постоянной и равномерной.
При движении вниз по склону, как показана на риc. 2.5., в случае, когда величина систематической ошибки дифферента положительна (задняя часть приемной антенны выше передней), положение измеренных глубин будет находится позади истинных, а сами измеренные глубины будут меньше истинных. После поворота на обратный курс картина изменится на противоположную. На этом и построена программа расчета систематической ошибки угла дифферента.
После завершения калибровка файлы 1 и 2 поступают в программное обеспечение ЭМЛ для расчета поправки, компенсирующей систематическую ошибку дифферента приемной антенны.
Панель программы калибровки, вычисляющей поправку за дифферент приемной антенны ЭМЛ, в составе гидрографической информационной системы HYPACK MAX изображена на рис.2.5.
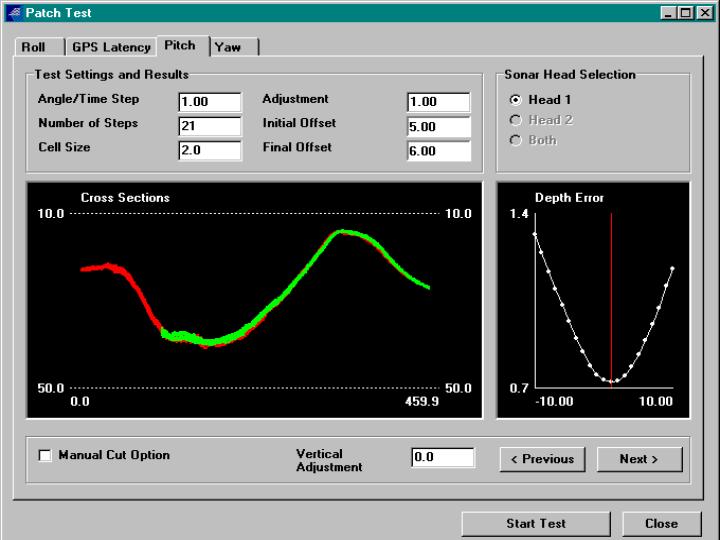
Рис.2.6. Панель программы, вычисляющей поправку за дифферент приемной антенны ЭМЛ
(в составе гидрографической информационной системы HYPACK MAX )
При калибровке угла дифферента, как правило, не ограничиваются однократным прохождением по калибровочному галсу в прямом и обратном направлении. Величину рассчитанной поправки по данным первой калибровки используют для выполнения повторной, чтобы убедится в надежности результата. На рис.2.6 представлен результат повторной калибровки (FinalOffset), который отличается от предыдущего на 0.1º.
Калибровка угла дифферента не требует столь пристального внимания, как угол крена. При подготовке к промеру с ЭМЛ целесообразно эту калибровку выполнять перед началом и после завершения промера на заданной акватории. Стабильность поправки, получаемой при последовательных калибровках дает уверенность в качестве получаемых материалов много-лучевого промера.
2.2.3. Определение систематической ошибки в угле рыскания (Yaw Bias =gamma).
На рис.2.7. изображены возможные систематические ошибки планового положения глубин, вычисленные по наклонным (боковым) лучам ЭМЛ, получаемые в результат неучтенной систематической ошибки в угле рыскания.
Систематическая ошибка рыскания становиться наибольшей на крайних лучах ЭМЛ и неточность определения компенсирующей ее поправки является основным фактором, препятствующим использование информации крайних лучей для гидрографических целей, особенно на расчлененном рельефе
 .
.
Рис.2.7. Систематические ошибки планового положение глубин, вычисленных по
крайним лучам, получаемые в результате неучтенной систематической ошибки
в угле дифферента.
Калибровка угла рыскания осуществляется на акватории с ровным пологим дном и производится в следующей последовательности:
А) судно проходит по рабочему участку калибровочного галсу «b» (рис.2.2.) в одном направле -
нии с регистрацией данных промера в файл 1, а затем по рабочему участку галса
«с» (рис.2.2.) в том же направлении с регистрацией данных промера в файл 2.
Б) маневр разворота на следующий (параллельный) галс должен выполняться плавно с боль
шим радиусом циркуляции, для того, чтобы не вывести из равновесия гироскопические
приборы; общая длина калибровочного галса должна включать рабочий участок (100-
150 м), а также подходной участка (300-400 м.) на которых происходит ввод в рабочий
режим гирокурсоуказателя и гировертикали после маневра выхода на следующий галс.
В) при следовании по первому и второму параллельным галсам уклонения от заданной линии
галса должно быть минимальным.
С) при проведении калибровки скорость судна на рабочих участках калибровочного галсов
должна быть постоянной и равномерной.
Д) расстояние между галсами должно быть выбрано так, чтобы в самой мелководной части обеих галсов полосы зондирования ЭМЛ взаимно перекрывались, а на рабочей части галсов перекрытие полос зондирования должно составлять до 50%..
Взамен галсов «a» и «b», проложенных вверх или вниз по донному склону данная калибровка может производиться и с использование приметного объекта, располагаемого на морском дне в средней точке между калибровочными галсами. Тогда на первом галсе положения объекта будет зафиксировано лучами одного борта, а на втором (параллельном ) галсе – лучами другого борта.
При выполнении калибровки угла рыскания на склоне, как показано на ри.2.2., в качестве «объекта» выступают равномерно расположенные параллельные изобаты На этом также может быть построена программа расчета систематической ошибки угла рыскания.
После завершения калибровка файлы 1 и 2 поступают в программное обеспечение ЭМЛ для расчета поправки, компенсирующей систематическую ошибку рыскания - фактически курсовой ошибки установки приемной антенны.
Панель программы калибровки, вычисляющей поправку за дифферент приемной антенны ЭМЛ, в составе гидрографической информационной системы HYPACK MAX изображена на рис.2.5.
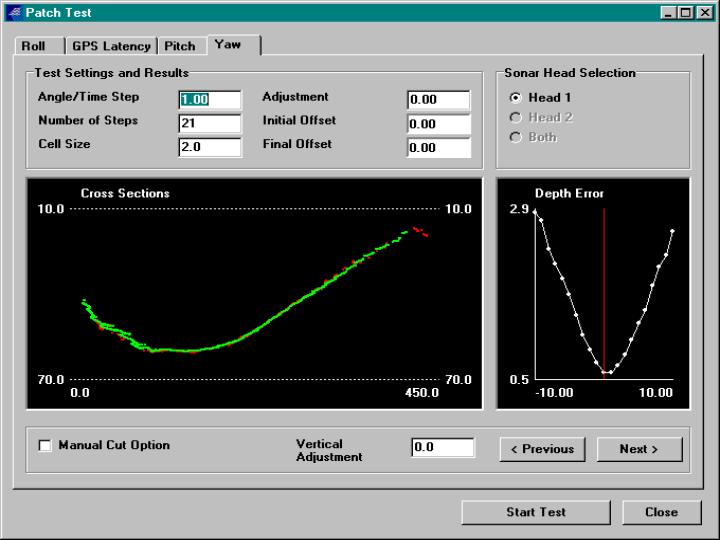
Рис.4.7. Панель программы, вычисляющей поправку за рыскание приемной антенны ЭМЛ
(в составе гидрографической информационной системы HYPACK MAX )
Расчет поправки рыскания, как правило, производится совместно с расчетом поправок за крен и
Дифферент на завершающем этапе калибровки на полигоне.
Причины необходимости калибровки временного запаздывания поступления навигационной информации (Position Latency).
Обеспечение высокой точности фиксации координат приемной антенны ЭМЛ в момент прихода отраженного от дна эхосигнала по каждому из лучей требует обеспечения временной синхронизации внутреннего таймера ЭМЛ и СНА. В англоязычной технической литературе систематическая ошибка запаздывания поступления навигационной информации называются: «timing errors» или «Position Latency».
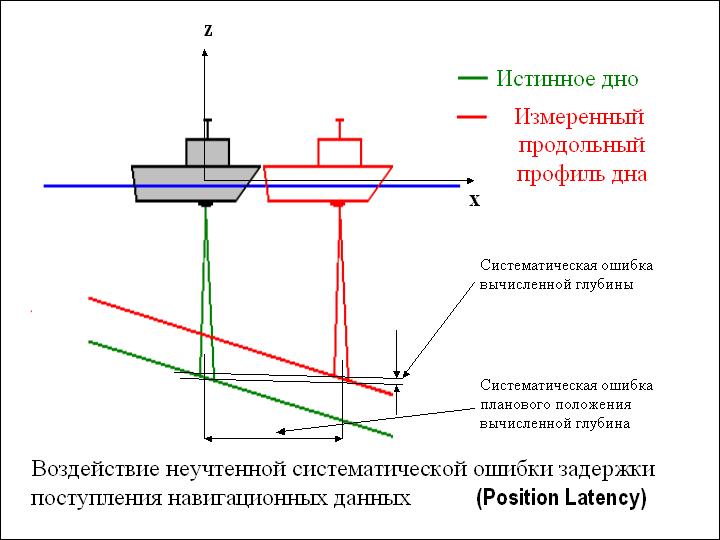
Рис.2.9. Систематическая ошибка планового положение глубин, вычисленных в полосе обзора,
в результате неучтенной систематической ошибки запаздывания поступления
навигационной информации.
Систематической ошибки планового положения вычисленной глубина по направлению движения судна-носителя ЭМЛ возникает в результате запаздывания поступления навигационных данных из СНА в программное обеспечение ЭМЛ.
Для определения систематической ошибки запаздывания навигационной информации выполняется сравнение батиметрических данных полученных на двух калибровочных галсах.
При этом возможны три варианта выполнения этой калибровки. Поэтому данную калибровку целесообразно комплексировать (выполнять параллельно) с другими видами калибровки.
Калибровочный галс может располагаться на акватории с ровным пологим дном, либо проходить над приметным объектом, расположенным на морском дне. При этом возможны следующие варианты:
1) калибровка при прохождении прямого и обратного галса на одной скорости;
2) калибровка при прохождении одного галса в одном направлении, но с заметно
разными скоростями;
3) калибровка при прохождении на приметным объектом на дне с разными скоростями.
на встречных галсах.
Калибровка временного запаздывания навигационной информации на акватории с ровным пологим дном по варианту 1 может производится совместно с калибровкой угла дифферента (см.п.2.2.2).
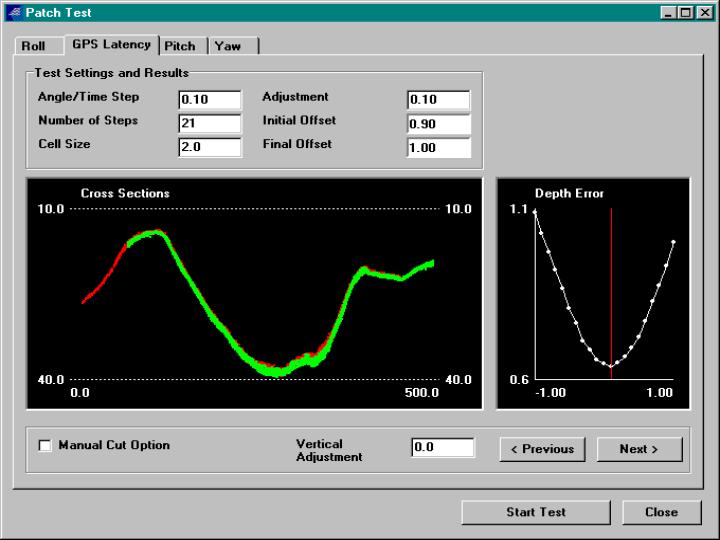
Рис.2.10. Панель программы, вычисляющей поправку временного запаздывания навигационной информации (в составе гидрографической информационной системы HYPACK)
Калибровка временного запаздывания навигационной информации на акватории с ровным пологим дном по варианту 2 может производится в следующей последовательности:
А) судно проходит по рабочему участку калибровочного галсу «b» (рис.2.2.) в одном направле -
нии с высокой скорость, осуществляя регистрацию данных промера в файл 1, а затем
По томе же рабочему участку галса в том же направлении с заметно меньшей скоростью
с регистрацией данных промера в файл 2.
Б) маневр разворота на следующий (повторный) галс должен выполняться плавно с боль
шим радиусом циркуляции, для того, чтобы не вывести из равновесия гироскопические
приборы; общая длина калибровочного галса должна включать рабочий участок (100-150 м),
а также подходной участка (300-400 м.) на которых происходит ввод в рабочий режим
гирокурсоуказателя и (или) гировертикали после маневра выхода на повторный галс;
В) при следовании по первому и второму галсам уклонения от заданной линии галса должно
быть минимальным.
С) при проведении калибровки скорость судна на рабочих участках калибровочных галсов
должна быть постоянной и равномерной.
При третьем варианте калибровки, проходя на приметным объектом с разными скоростями, получаем различную форму сечения этого объекта вдоль линии галса. На этом также может быть построена программа расчета систематической ошибки запаздывания навигационной информации..
После завершения калибровка файлы 1 и 2 поступают в программное обеспечение ЭМЛ для расчета поправки, компенсирующей систематическую ошибку временного запаздывания поступления навигационной информации.
Панель программы калибровки, вычисляющей поправку за запаздывания поступления навигационной информации, в составе гидрографической информационной системы HYPACK MAX изображена на рис.2.10.
При калибровке времени запаздывания поступления навигационной информации, как правило, не ограничиваются однократным прохождением по калибровочным галсам в варианте 1, 2 или 3 . Величину рассчитанной поправки по данным первой калибровки используют для выполнения повторной, чтобы убедится в надежности результата. На рис.2.10 представлен результат повторной калибровки (FinalOffset), который отличается от предыдущего на 0.10 с.
Данную калибровку необходимо выполнять перед началом каждого проекта проведения гидрографических работ, после его окончания, а также в том случае, когда в ходе проведения работ на объекте была выполнена замена СНА, его ремонт (замена плат), или если в ходе его использования были отмечены нештатные ситуации.
После завершения калибровки, полученные поправки должны быть вручную введены в
программу реального времени, обеспечивающую работу ЭМЛ.
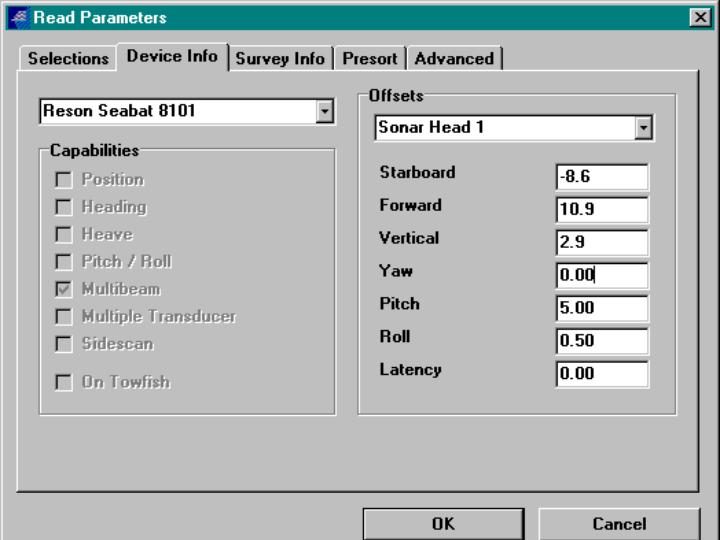
Рис.4.11 Панель программы использования вычисленных поправок ЭМЛ
(в составе гидрографической информационной системы HYPACK MAX )
Панель программы, обеспечивающей ввод угловых поправок крена (Roll), дифференты (Pitch) и рыскания (Yaw), а также поправки на запаздывание поступления навигационных данных (Latency) для ЭМЛ SeaBat 8101 фирмы RESON в составе пакета реального времени гидрографической информационной системы HYPACK MAX представлена на рис.2.11. Кроме того, панель «Offsets» используется и для ввода судовых координат, в которых установлена приемопередающая антенна ЭМЛ SeaBat 8101:по ДП -«Starboard», по миделю- «Forward», а также вер- тикального положения относительно начала судовой системы: параметр «Vertical» (как правило, центра тяжести судна).
Кроме наглядного графического представления процесса калибровки и обеспечения расчета соответствующих поправок, программное обеспечение в графической форме выдает также и оценку точности глубины , рассчитанной с учетом получаемой поправки (окно»Depth Error»). Программное обеспечение калибровки входит в состав пакета программ каждого ЭМЛ. Интерфейс данного программного обеспечения постоянно совершенствуется в части наглядности
Представления результатов и удобства работы оператора. Совершенствуются и алгоритмы расчета соответствующих систематических ошибок, повышая тем самым точность вычисления поправок.
Рекомендуемая последовательность проведения калибровки ЭМЛ.
Особенности методики выполнения калибровки многолучевой системы, как правило, определяется реализацией конкретного программного обеспечения ЭМЛ.
Последовательность выполнения калибровки ЭМЛ рассмотрим на примере пакета программ,
реализованного в составе гидрографической информационной системы HYPACK MAX.
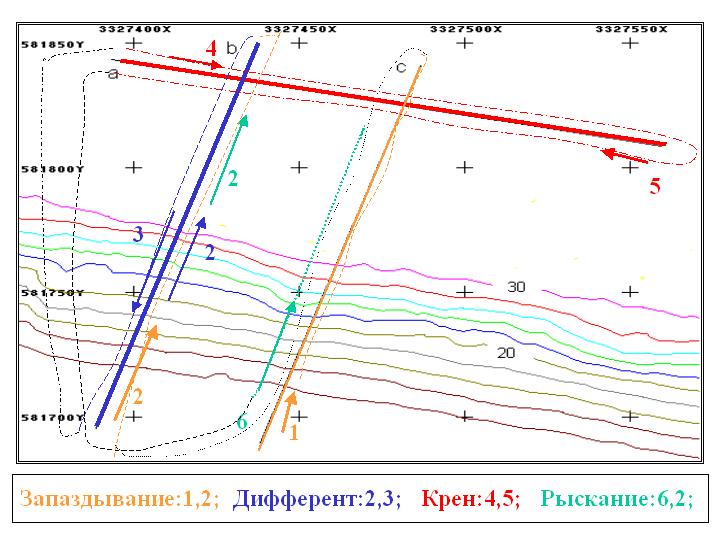
Рис.4.12. Последовательность прохождения галсов при калибровке ЭМЛ
Программное обеспечение, реализованное в составе гидрографической информационной системы HYPACK MAX, использует пару файлов, записанных на паре калибровочных галсов.
На рис.2.12. изображена последовательность прохождения галсов «a», «b», «c», обеспечивающая
экономию судового времени при выполнении калибровки с использование программного
обеспечения пакета ЭМЛ гидрографической информационной системы HYPACK MAX.
Стандартная процедура калибровки ЭМЛ предусматривает следующую последовательность:
А) временное запаздывание поступления навигационной информации;
Б) угол дифферента передающей антенны;
В) угол крена приемной антенны;
Г) угол рыскания (курсового положения) приемной антенны
Для проведения калибровки первоначально судно выходит на галс «С» с юга и проходит его с минимальной скоростью (проход с регистрацией файла 1). Далее выполняется разворот с выходом на галс «В» (проход с регистрацией файла 2), который выполняется с удвоенной скоростью. Файлы 1 и 2 используются для расчета систематической ошибки временной задержки, а полученная поправка немедленно вводится в программу калибровки при приведении дальнейших работ.
Все последующие галсы выполняются с постоянной скоростью.
После завершения галса «В» выполняется разворот на 180º для прохождения галса «В» в обратном направлении с регистрацией файла 3. По окончанию обратного галса файлы 2 и 3 используются для расчета систематической ошибки угла дифферента. Полученная поправка вводится в программу калибровки.
Далее выполняется галс «А» в прямом (файл 4) и обратном направлении (файл 5). На основе этой информации рассчитывается систематическая ошибка угла крена. Поправка за крен вводится в программу калибровки.
Последним этапом является повторный выход на галс «С» и проход его в северном направлении с регистрацией файла 6. После завершения галса «С» файлы 2 и 6 используются для расчета систематической ошибки рыскания. Вычисленная поправка вводится в программу калибровки. На этом первый этап калибровки заканчивается.
Для получения подтверждения полученных поправок целесообразно повторно выполнить калибровку по изложенной выше схеме.
Многолучевые эхолоты, имеющие две приемо-передающие антенны имеют несколько отличную процедуру выполнения калибровки. При этом возникает необходимость прохождения дополнительных прямых и обратных галсов для расчета систематических ошибок крена отдельно для антенн правого и левого бортов.