

1.1 Выбор первоначальной совокупности средств измерений
Для измерения напряжения можно использовать несколько различных систем: прибор ферродинамической системы, прибор электромагнитной системы, прибор магнитоэлектрической системы.
Прибор ферродинамической системы (рисунок 2.1). [16]
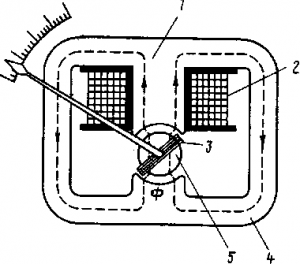
Рисунок 2.1 Принципиальная схема ферродинамического измерительного механизма:
1 – зазор между полюсами; 2 – неподвижная катушка; 3 – подвижная катушка; 4 – ферромагнитный сердечник; 5 – цилиндрический сердечник
Работа ферродинамического прибора основана на взаимодействии двух катушек, обтекаемых электрическим током. Ферродинамический измерительный механизм состоит из двух катушек: неподвижной 2 и расположенной внутри нее подвижной 3. Подвижная катушка 3 связана с осью прибора со стрелкой и с двумя спиральными пружинами 4 (или растяжками), которые служат для создания противодействующего момента и подвода тока к подвижной катушке 3. В приборе применяется демпфер.
При прохождении токов по катушкам, в них возникают электродинамические силы, которые стремятся повернуть подвижную катушку относительно неподвижной на некоторый угол.
Прибор электромагнитной системы (рисунок 2.2). [20]
Приборы этой системы имеют неподвижную катушку – 1 и подвижную часть в виде стального сердечника – 2, связанного с индикаторной стрелкой – 3 противодействующей пружины – 4.
Измеряемый ток, проходя по катушке, намагничивает сердечник и втягивает его в катушку. При равенстве вращающего и тормозящего моментов система успокоится. По углу поворота подвижной части определяют измеряемый ток.
Среднее значение вращающего момента пропорционально квадрату измеряемого тока:

Так как тормозящий момент, создаваемый спиральными пружинами, пропорционален углу поворота подвижной части, уравнение шкалы прибора запишем в виде:

Другими словами, угол отклонения подвижной части прибора пропорционален квадрату действующего значения переменного тока.
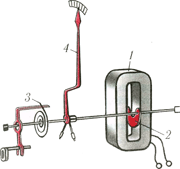
Рисунок 2.2 Устройство электромагнитного системы:
1 – катушка; 2 – сердечник; 3 – стрелка; 4 – противодействующая пружина
Достоинства электромагнитной системы:
простота конструкции;
надежность в работе;
стойкость к перегрузкам.
Недостатки электромагнитной системы:
низкая чувствительность;
большое потребление энергии;
небольшая точность измерения;
неравномерная шкала.
Прибор магнитоэлектрической системы (рисунок 2.3). [19]
Магнитоэлектрический измерительный механизм (рис. 2.3) выполнен в виде постоянного магнита 1, снабженного полюсными наконечниками 2, между которыми укреплен стальной сердечник 3. В кольцеобразном воздушном зазоре, образованном полюсными наконечниками и сердечником, помещена подвижная катушка 5, намотанная на алюминиевый каркас. Катушка выполнена из очень тонкого провода и укреплена на оси, связанной со стрелкой спиральными пружинами 4 или растяжками. Через эти же пружины или растяжки осуществляется подвод тока к катушке.
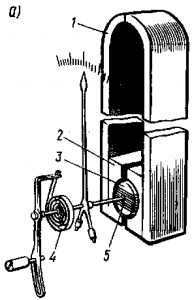
Рисунок 2.3 Устройство магнитоэлектрического измерительного:
1 – постоянный магнит; 2 – полюсный наконечник; 3 – сердечник; 4 – спиральная пружинка; 5 – подвижная катушка
Так
как индукция
 магнитного поля, создаваемого постоянным
магнитом, неизменна и не зависит от
тока
магнитного поля, создаваемого постоянным
магнитом, неизменна и не зависит от
тока
 ,
то:
,
то:

где  —
постоянная величина, зависящая от
конструктивных параметров данного
прибора (числа витков катушки, ее
размеров, индукции
в воздушном зазоре).
—
постоянная величина, зависящая от
конструктивных параметров данного
прибора (числа витков катушки, ее
размеров, индукции
в воздушном зазоре).
Повороту
подвижной части измерительного механизма
препятствует противодействующий момент
 ,
создаваемый спиральными пружинами или
растяжками. Этот момент пропорционален
углу закручивания, т. е. углу поворота
α подвижной части; при этом:
,
создаваемый спиральными пружинами или
растяжками. Этот момент пропорционален
углу закручивания, т. е. углу поворота
α подвижной части; при этом:

где  —
постоянная величина, зависящая от
жесткости спиральных пружин или
растяжек. Поворот подвижной части
измерительного механизма и стрелки
будет продолжаться до тех пор, пока
вращающий момент М,
создаваемый током
,
не уравновесится противодействующим
моментом
.
В момент равновесия
—
постоянная величина, зависящая от
жесткости спиральных пружин или
растяжек. Поворот подвижной части
измерительного механизма и стрелки
будет продолжаться до тех пор, пока
вращающий момент М,
создаваемый током
,
не уравновесится противодействующим
моментом
.
В момент равновесия
 ,
откуда получим:
,
откуда получим:

Следовательно,
угол поворота
 подвижной части пропорционален
измеряемому току I.
Поэтому магнитоэлектрические приборы
имеют равномерную шкалу.
подвижной части пропорционален
измеряемому току I.
Поэтому магнитоэлектрические приборы
имеют равномерную шкалу.
Постоянная величина k называется чувствительностью прибора, она характеризуется углом поворота стрелки в градусах или в делениях шкалы, приходящимся на единицу изменения измеряемой величины.
Величина,
обратная чувствительности,
 называется постоянной
прибора,
или ценой
деления. Если
умножить отсчет по шкале на цену деления
прибора, то можно определить значение
измеряемой величины. Для устранения
колебаний подвижной системы прибора
при переходе стрелки из одного положения
в другое электроизмерительные приборы
снабжают воздушными или магнитно-индукционными
демпферами.
называется постоянной
прибора,
или ценой
деления. Если
умножить отсчет по шкале на цену деления
прибора, то можно определить значение
измеряемой величины. Для устранения
колебаний подвижной системы прибора
при переходе стрелки из одного положения
в другое электроизмерительные приборы
снабжают воздушными или магнитно-индукционными
демпферами.
Кроме рассмотренного выше измерительного механизма с внешним (по отношению к катушке) постоянным П-образным магнитом, существуют механизмы с магнитами другой формы (цилиндрической, в виде призмы, а также с внутрирамочными неподвижными и подвижными магнитами).
Достоинством приборов магнитоэлектрической системы являются равномерность шкалы, высокая точность и независимость показаний от посторонних магнитных полей. К недостаткам их относятся непригодность для измерения переменного тока, необходимость соблюдения полярности при включении и чувствительность к перегрузкам (при перегрузке тонкая проволока катушки и спиральные пружины, подводящие к ней ток, могут сгореть).
Вывод: исходя из вышесказанного, наиболее рациональным вариантом будет использование в качестве СИ магнитоэлектрический прибор.