

1.3. Решение задач линейного программирования графическим методом
Рассмотрим задачу линейного программирования с ограничениями-неравенствами, которые имеют вид:
a11x1 + a12x2 + … + a1nxn ≥ b1;
a21x1 + a22x2 + … + a2nxn ≥ b2; (1.3.1.)
………………………………
аm1x1 + am2x2 + … + amnxn ≥ bm;
и являются линейно-независимыми. Последнее означает, никакое из них нельзя представить в виде линейной комбинации других. Требуется найти xi ≥ 0, которые удовлетворяют неравенствам и обращают в минимум
L=

Введём уравнения:
 =
=

 =
=
 (1.3.2)
(1.3.2)
 =
=

где y1, y2, …, yn - добавочные переменные, которые также как и
x1 , x2, …, xn являются неотрицательными.
Таким образом, имеем общую задачу линейного программирования - найти неотрицательные x1 , x2, …, xn y1, y2, …, yn, чтобы они удовлетворяли системе уравнений (1.3.2.) и обращали в минимум L=
Коэффициенты в формуле (1.3.2.) перед yj равны нулю.
Графический метод довольно прост и нагляден для решения задач линейного программирования с двумя переменными. Он основан на геометрическом представлении допустимых решений и Целевую Функцию задачи.
Каждое из неравенств задачи линейного программирования (1.3.1.) определяет на координатной плоскости (x1Ox2) некоторую полуплоскость (рис.1.3.1), а система неравенств в целом – пересечение соответствующих плоскостей. Множество точек пересечения данных полуплоскостей называется областью допустимых решений (ОДР). ОДР всегда представляет собой выпуклую фигуру, т.е. обладающую следующим свойством: если две точки А и В принадлежат этой фигуре, то и весь отрезок АВ принадлежит ей. ОДР графически может быть представлена выпуклым многоугольником, неограниченной выпуклой многоугольной областью, отрезком, лучом, одной точкой. В случае несовместности системы ограничений задачи (1.3.1.) ОДР является пустым множеством.
Все вышесказанное относится и к случаю, когда система ограничений (1.3.1.) включает равенства, поскольку любое равенство
ai1x1 + ai2x2 = bi можно представить в виде системы двух неравенств (см. рис.1.3.1)
 (1.3.3.)
(1.3.3.)
ЦФ L(x)=c1x1+c2x2 при фиксированном значении L(x)=L определяет на плоскости прямую линию c1x1+c2x2=L . Изменяя значения L, мы получим семейство параллельных прямых, называемых линиями уровня.
Это
связано с тем, что изменение значения
L повлечет изменение лишь длины отрезка,
отсекаемого линией уровня на
оси Ox2 (начальная
ордината), а угловой коэффициент прямой
tg
 останется
постоянным (см.рис. 1.3.1). Поэтому для
решения будет достаточно построить
одну из линий уровня, произвольно выбрав
значение L.
останется
постоянным (см.рис. 1.3.1). Поэтому для
решения будет достаточно построить
одну из линий уровня, произвольно выбрав
значение L.
Вектор  =
(c1,
c2)
координатами
из коэффициентов ЦФ при x1 и x2 перпендикулярен
к каждой из линий уровня (см. рис.1.3.1).
Направление вектора
совпадает
с направлением возрастания ЦФ,
что является важным моментом для решения
задач. Направление убывания ЦФ
противоположно направлению вектора
.
=
(c1,
c2)
координатами
из коэффициентов ЦФ при x1 и x2 перпендикулярен
к каждой из линий уровня (см. рис.1.3.1).
Направление вектора
совпадает
с направлением возрастания ЦФ,
что является важным моментом для решения
задач. Направление убывания ЦФ
противоположно направлению вектора
.
Суть графического метода заключается в следующем. По направлению (против направления) вектора в ОДР производится поиск оптимальной точки x* = (x1* , x2*). Оптимальной считается точка, через которую проходит линия уровня Lmax(Lmin), соответствующая наибольшему (наименьшему) значению функции L(x). Оптимальное решение всегда находится на границе ОДР, например, в последней вершине многоугольника ОДР, через которую пройдет целевая прямая, или на всей его стороне.
При поиске оптимального решения задач линейного программирования возможны следующие ситуации: существует единственное решение задачи; существует бесконечное множество решений (альтернативный оптиум); ЦФ не ограничена; область допустимых решений – единственная точка; задача не имеет решений.
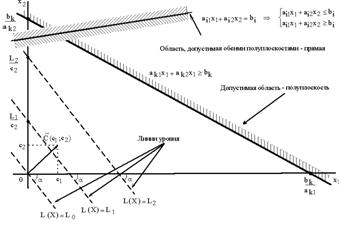
Рисунок 1.3.1 Геометрическая интерпретация ограничений и ЦФ задачи.
Задача №1.
Пример решения задач линейного программирования симплекс–методом.*


Решение.
Приводим задачу к каноническому виду. Для этого в левую часть правого ограничения вводим дополнительные переменные Х4 , Х5 и Х6 с коэффициентом +1. В целевую функцию переменные Х4 , Х5 и Х6 входят с коэффициентом 0.
Получим:


Находим начальное опорное решение. Для этого свободные переменные приравниваем к 0.

Получаем опорное решение.

С единичным базисом Б1.

Вычисляем оценки разложения векторов условий по базису опорного решения по формуле.
 :
:
Сб = (с1, с2, ... , сm ) — вектор коэффициентов целевой функции при базисных переменных
Xk = (x1k, x2k, ... , xmk ) — вектор разложения соответствующего вектора Аk по базису опорного решения
Сk — коэффициент целевой функции при переменной хk.






Оценки векторов входящих в базис всегда равны нулю. Опорное решение, коэффициенты разложений и оценки разложений векторов условий по базису опорного решения записываются в симплексную таблицу:
-
52
44
41
0
0
0
Б
Сб
А0
А1
А2
А3
А4
А5
А6
D1
A4
0
821
341
261
321
1
0
0
2.4
A5
0
721
191
151
131
0
1
0
4
A6
0
921
401
461
471
0
0
1
2.3

0
-52
-44
-41
0
0
0
Сверху над таблицей для удобства вычислений оценок записываются коэффициенты целевой функции. В первом столбце "Б" записываются векторы, входящие в базис опорного решения. Порядок записи этих векторов соответствует номерам разрешенных неизвестных в уравнениях ограничениях. Во втором столбце таблицы "Сб" записываются коэффициенты целевой функции при базисных переменных в том же порядке. При правильном расположении коэффициентов целевой функции в столбце "Сб" оценки единичных векторов, входящих в базис, всегда равных нулю.
В последней строке таблицы с оценками Δk в столбце "А0" записываются значения целевой функции на опорном решении Z(X1).
Начальное опорное решение не является оптимальным, так как в задаче на максимум оценки Δ1 = -52, Δ2= -44, Δ3= -41 для векторов А1, А2 и А3 отрицательные.
По теореме об улучшении опорного решения, если в задаче на максимум хотя бы один вектор имеет отрицательную оценку, то можно найти новое опорное решение, на котором значение целевой функции будет больше.
Определим, введение какого из двух векторов приведет к большему приращению целевой функции.
Приращение
функции находится по формуле:

Вычислим
значение D по формуле:

Полученные значения записываем в таблицу.
Находим
приращение целевой функции при введении
в базис первого вектора

Следовательно, для более быстрого приближения к оптимальному решению необходимо ввести в базис опорного решения вектор А1 вместо первого вектора базиса А6, так как минимум параметра D01 достигается в третьей строке .
Производим преобразование Жордана с элементом Х31 =401 , получаем второе опорное решение Х2 = (2.3;0;0;36.7;281.7;0) с базисом Б2 = (А4, А5, А1).
-
52
44
41
0
0
0
Б
Сб
А0
А1
А2
А3
А4
А5
А6
A4
0
36.7
0
-131.15
-81.38
1
0
-0.85
A5
0
281.7
0
-68.65
-94.38
0
1
-0.478
A1
52
2.3
1
1.15
1.18
0
0
0.0025
119.6
0
15.8
20.36
0
0
0.13






Это решение является единственным оптимальным, так как для всех векторов, не входящих в базис оценки положительные
Δ2 = 15.8, Δ3 = 20.36, Δ6 = 0.13.
Ответ: max f(X)=119.6 при Х=(2.3;0;0;36.7;281.7;0)