

Процедуры фильтрации
Задачи и пути производства фильтрации
Чаще всего пути производства фильтрации путем свертки сейсмической трассы с оператором фильтра, 7.1 – 1, второй путь – производство фильтрации в области частот 7.1. – 2. Где s(t) – отфильтрованная трасса, y(t)- начальная трасса, h(t) –характеристика фильтра, S(f) – спектр отфильтрованной трассы, Y(f) – спектр начальной трассы, H(f) – частотная характеристика фильтра. Получив S(f) и сделав обратное преобразование мы получим отфильтрованную трасс 7.2. Третий вариант – фильтрация z-области с использованием z преобразований.
![]()
![]()
![]()
![]()
![]()
П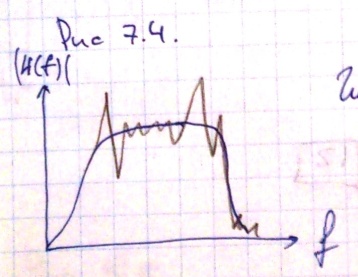
 оследний
способ – рекурсивная фильтрация. Для
решения оптимальным образом поставленной
перед обратной фильтрацией задачи
применяются некоторые специальные
критерии, а сами фильтры с точки зрения
выбранного критерия называются
оптимальными. Это фильтрация с
использованием одного или нескольких
одинаковых фильтров. Она обычно
применяется, когда частотные характеристики
фильтров имеют крутые склоны боковых
срезов, рис 7.4. В этом случае возникают
явления Гиббса, которые осложняют
фильтруемый сигнал появлением
высокочастотных «паразитных» компонент.
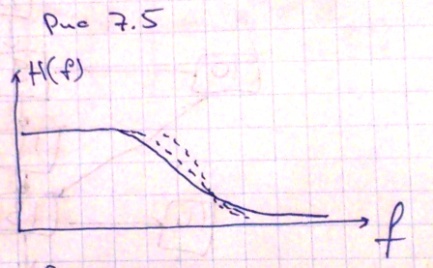
При рекурсивной фильтрации мы используем
фильтр с пологой частотной характеристикой
рис 7.5., которая не дает явление Гиббса,
если провести такую фильтрацию несколько
раз с заданной частотной характеристикой,
то каждый раз крутизна бокового среза
будет увеличиваться, а явления Гиббса
возникать не будет.
оследний
способ – рекурсивная фильтрация. Для
решения оптимальным образом поставленной
перед обратной фильтрацией задачи
применяются некоторые специальные
критерии, а сами фильтры с точки зрения
выбранного критерия называются
оптимальными. Это фильтрация с
использованием одного или нескольких
одинаковых фильтров. Она обычно
применяется, когда частотные характеристики
фильтров имеют крутые склоны боковых
срезов, рис 7.4. В этом случае возникают
явления Гиббса, которые осложняют
фильтруемый сигнал появлением
высокочастотных «паразитных» компонент.
При рекурсивной фильтрации мы используем
фильтр с пологой частотной характеристикой
рис 7.5., которая не дает явление Гиббса,
если провести такую фильтрацию несколько
раз с заданной частотной характеристикой,
то каждый раз крутизна бокового среза
будет увеличиваться, а явления Гиббса
возникать не будет.
С огласованная фильтрация
Под согласованной фильтрацией понимается фильтрация, которая согласуется по параметрам с полезным сигналом или с параметрами помех, рис 7.6. Полезные волны будут низкочастотные, отраженные – около 50 Гц, а микросейсмические колебания – высокочастотные. Используется полосовой фильтр, который согласует с характеристиками отраженных волн.
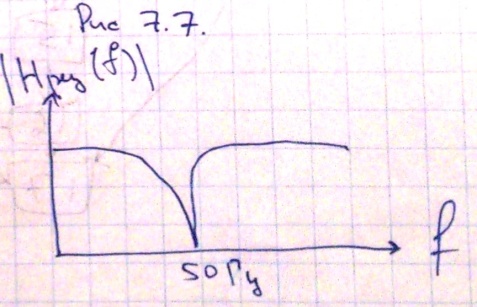
Другой фильтр – режекторный, рис 7.7, который согласуется с промышленными частотами.
Временная и амплитудная разрешенность сейсмических записей
Возможность обнаружения каких-то волн на фоне помех зависит от амплитудной разрешенности записи, т.е. превышение амплитуды или энергии полезной волны, т.е. амплитуды полезной волны над уровнем помех. При этом предполагается, что этот полезный сигнал представлен несколькими периодами колебаний, т.е. его длительность может быть достаточно большой. Количественно амплитудная разрешенность характеризуется отношением сигнал/помеха. Считается, что в этом случае амплитуда полезного сигнала должна быть как минимум вдвое больше среднеквадратического уровня помех. При обработке увеличение амплитудной разрешенности, т.е. увеличение отношения сигнал/помеха, достигается путем подавления тех составляющих спектра колебаний, в которых мала доля энергии полезных волн. В этом случае у нас происходит ухудшение временной разрешающей способности полезного сигнала.
Д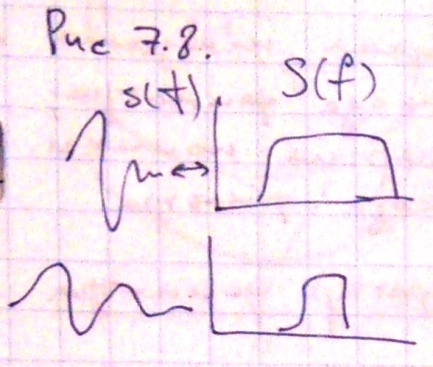 ля
подавления волн-помех нам приходиться
делать полосовую фильтрацию, т.е. сужать
спектр. В этом случае у нас ухудшается
временнаяразрешенность сигнала, рис
7.8. А временная разрешенность сигнала
позволяет нам различать близко следующие
друг за другом колебания, т.е. для
повышения временной разрешающей
способности необходимо сокращать
длительность сигналов. Поэтому обычно
в практике приходиться находить какое-то
компромиссное решение достижения
максимальной временной разрешенности
при обеспечении записи достаточной
амплитудной разрешенности. Именно с
этих позиций обычно проводиться вся
обработка.
ля
подавления волн-помех нам приходиться
делать полосовую фильтрацию, т.е. сужать
спектр. В этом случае у нас ухудшается
временнаяразрешенность сигнала, рис
7.8. А временная разрешенность сигнала
позволяет нам различать близко следующие
друг за другом колебания, т.е. для
повышения временной разрешающей
способности необходимо сокращать
длительность сигналов. Поэтому обычно
в практике приходиться находить какое-то
компромиссное решение достижения
максимальной временной разрешенности
при обеспечении записи достаточной
амплитудной разрешенности. Именно с
этих позиций обычно проводиться вся
обработка.