

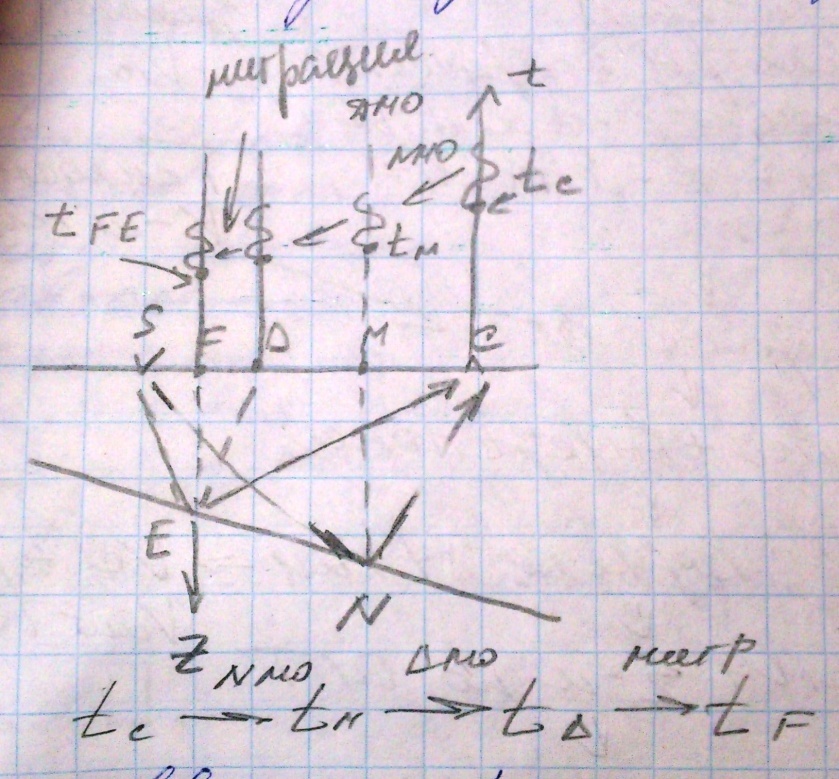
Назначение процедуры дмо (Dip….MoveOut)
D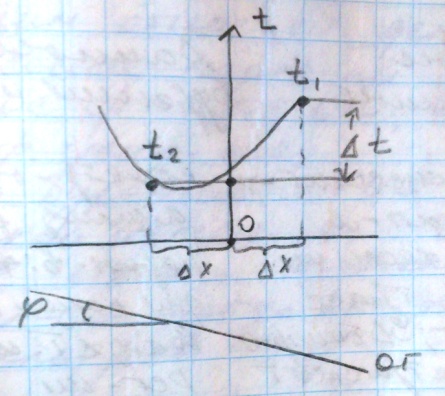 MO
– условная кинематическая поправка за
угол наклона ОГ.
MO
– условная кинематическая поправка за
угол наклона ОГ.
DMO позволяет учесть угол наклона отражающей границы. Формируются годографы ОПВ.
![]()
![]()
Где ![]() – DMO.
– DMO.
Вводится перед вводом Δtкин, а затем производиться миграция.
Если вводим Δtкин, используем tc, то это время относим к точке М. DMO относят к точке D.
Лекция 7
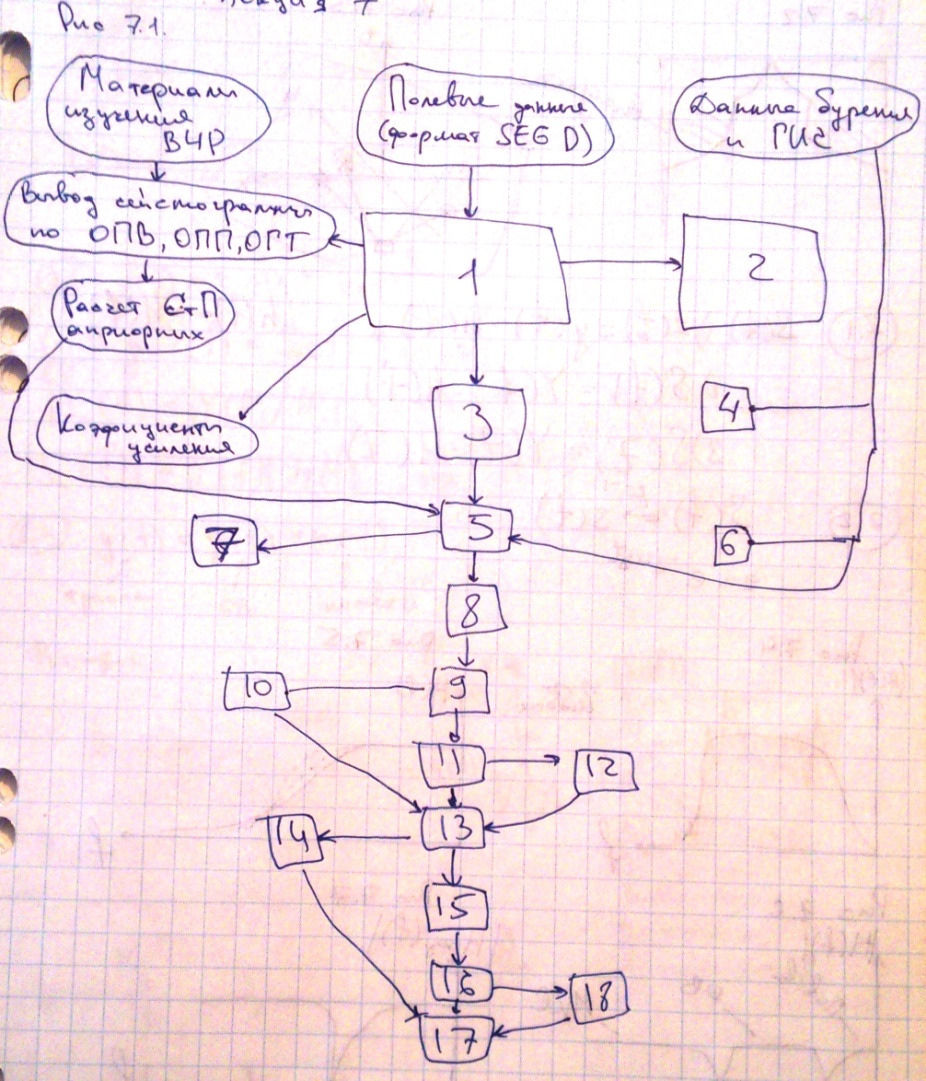
Р ис
7.1. После получения входных данных идет
процедура препроцессинга (блок 1), которая
предполагает ввод всех материалов в
память ЭВМ и преобразование полевых
форматов в машинные, демультиплексацию
(преобразование данных амплитуд в
трассы). Кроме того, вносятся координаты
в заголовки трасс, проводиться
редактирование. При редактировании
обнуляются бракованные трассы, меняется
полярность трасс и т.д. Существую
программы, которые осуществляют
редактирование в автоматическом режиме.
Также осуществляется мьютинг – исключение
наиболее искаженных участков сейсмограммы,
т.е. мы задаем какой-то закон скорости
и обрезаем искаженные участки сейсмограммы.
Кроме того, при больших удалениях и
малых временах t0
у нас растягиваются импульсы отраженных
волн. Поэтому часто мьютинг делают по
более сложному закону, рис 7.2. Также во
время препроцессинга можно делать
сортировку трасс по различным принципам,
вывести и посмотреть материалы. При
этом можно определить параметры полезных
волн и волн-помех, такие как кажущиеся
скорости, видимые частоты или периоды
колебаний. Это нужно для того, чтобы
потом правильно сформировать фильтры,
которые подчеркнут полезные волны и
подавят помехи.
ис
7.1. После получения входных данных идет
процедура препроцессинга (блок 1), которая
предполагает ввод всех материалов в
память ЭВМ и преобразование полевых
форматов в машинные, демультиплексацию
(преобразование данных амплитуд в
трассы). Кроме того, вносятся координаты
в заголовки трасс, проводиться
редактирование. При редактировании
обнуляются бракованные трассы, меняется
полярность трасс и т.д. Существую
программы, которые осуществляют
редактирование в автоматическом режиме.
Также осуществляется мьютинг – исключение
наиболее искаженных участков сейсмограммы,
т.е. мы задаем какой-то закон скорости
и обрезаем искаженные участки сейсмограммы.
Кроме того, при больших удалениях и
малых временах t0
у нас растягиваются импульсы отраженных
волн. Поэтому часто мьютинг делают по
более сложному закону, рис 7.2. Также во
время препроцессинга можно делать
сортировку трасс по различным принципам,
вывести и посмотреть материалы. При
этом можно определить параметры полезных
волн и волн-помех, такие как кажущиеся
скорости, видимые частоты или периоды
колебаний. Это нужно для того, чтобы
потом правильно сформировать фильтры,
которые подчеркнут полезные волны и
подавят помехи.
Е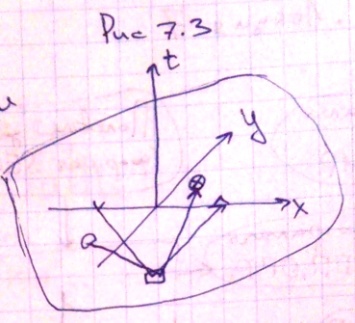 сли
обрабатываем работы 3D,
то суммирование колебаний проводиться
не по продольному годографу в пределах
сейсмограммы, а суммирование проводиться
по пространственному годографу, а
пространственный годограф формируется
из сейсмических трасс, общие глубинные
точки которых располагаются в пределах
маленького небольшого участка, который
называется «бином». Обычно размеры бина
составляют где-то 25*25 м или 50*50 м и перед
обработкой поверхность или площадь,
которую мы обрабатываем при работах
3D,
разбивается на такие участки и этот
процесс называется «бинирование». Рис
7.3. Если трасса попадает в пределы бина,
то мы берем ее и формируем пространственный
годограф, т.е. трассы располагаются не
в одной плоскости, а в разных, т.е. линия
ПВ-ПП может располагаться в разных
азимутах. Полученную суммарную трассу
мы относим к центру бина.
сли
обрабатываем работы 3D,
то суммирование колебаний проводиться
не по продольному годографу в пределах
сейсмограммы, а суммирование проводиться
по пространственному годографу, а
пространственный годограф формируется
из сейсмических трасс, общие глубинные
точки которых располагаются в пределах
маленького небольшого участка, который
называется «бином». Обычно размеры бина
составляют где-то 25*25 м или 50*50 м и перед
обработкой поверхность или площадь,
которую мы обрабатываем при работах
3D,
разбивается на такие участки и этот
процесс называется «бинирование». Рис
7.3. Если трасса попадает в пределы бина,
то мы берем ее и формируем пространственный
годограф, т.е. трассы располагаются не
в одной плоскости, а в разных, т.е. линия
ПВ-ПП может располагаться в разных
азимутах. Полученную суммарную трассу
мы относим к центру бина.
Блок 2 – спектральных анализ, выбор параметров: t, V и др. Для помех и полезных волн, ΔT их регистрации.
Можно вывести сейсмограммы и по ним рассчитать статические поправки, а также по интенсивности записи определять наиболее подходящие коэффициенты усиления. После этого все трассы формируются по принципу ОГТ. Блок 3 – ввод данных, полосовая фильтрация, регулировка амплитуд (сферическое расхождение). Фильтры по трассам: декон, FK-фильтры и др., для подавления волн-помех.
Блок 6 – тонкослойV-и плотностная (АК+ГГКп).
Блок 4 – выбор начального закона V(t0) для ввода кинематических поправок. После чего окончательно формируются статические поправки. С использованием этого закона скоростей и статических поправок строим суммарный временной разрез ОГТ (блок 5).Таким образом каждая сейсмограмма ОГТ по соседним точкам дает суммарную трассу, подборка этих суммарных трасс и дает нам временной разрез, который часто называется начальным или априорным. После этого идет применение различных фильтров, блок 8. Затем идет процедура коррекции статических поправок в процессе которой мы определяем окончательные СтП (блок 10). Затем идет 11 – DMO и коррекция кинематических поправок, в результате чего мы получаем блок 12 – закон изменения скоростей VОГТ(t0, x, y) и Vинт(t0, x, y). Причем блоки 9 и 11 часто проводятся в несколько этапов и иногда попеременно.
После этого проводиться суммирование по ОГТ, блок 13 и таким образом получаем суммарный временной разрез, блок 14, который и будет являться основным документом при интерпретации. Если это 3D работы, то мы получаем не разрез, а куб суммарных трасс. После получения суммарного разреза производиться дальнейшая обработка по суммарному разрезу или кубу данных, для этого прежде всего делают фильтрацию различного вида, блок 15 – фильтрация по разрезу (кубу), нуль-фазовыя, деконволюция, переменная по вермени, когерентная, иногда делают вторичную регулировку амплитуд, причем эти фильтры уже делают не по отдельным трассам, а по сейсмограммам или по всему разрезу. После этого проводиться миграция блок 16 – миграция после суммирования, окончательный суммарный разрез. Выдается разрез после миграции блок 17. По конечному суммарному разрезу и разрезу после миграции делается блок 18 – кинематическая интерпретация (привязка, корреляция, расчет глубин, построение карт). Таким образом, в простейшем случае на выходе графа обработки мы имеем как минимум конечный суммарный разрез и суммарный мигрированный разрез, ну или кубы информациии, которые и являются основными документами для дальнейшей кинематической интерпретации.
После этого может следовать этап динамической обработки и интерпретации, в процессе которой мы получаем динамические параметры или динамические атрибуты волновых полей, которые обычно используются для литолого-стратиграфического и петрографического анализа в межскважинном пространстве.На конечном этапе обычно уточняются значения интервальных скоростей, на основании чего формируется с учетом скважинных данных и результатов моделирования волновых полей. После этого проводят миграцию до суммирования, которая заключается в расчете путей сейсмических лучей с учетом преломления этих лучей на границах с разными скоростями. После этого заново формируются сейсмограммы и по годографам с учетом преломления, производиться суммирование колебаний с уточнением VОГТ. И в данном случае, полученная VОГТ называется скоростью миграции и с учетом этих скоростей и проводиться миграция до суммирования, которая лучше учитывает характер поведения отражающих границ и уменьшает искажения динамических особенностей отраженных волн, которые наблюдаются на суммарных временных разрезах. В этом случае формируются третий разрез или куб информации, т.е. разрез с миграцией до суммирования.
Таким образом, в этом случае миграция проводиться по годографам на полевых сейсмограммах, а не по суммарному годографу.