

Тема 4.5. Пуск ад. Способы регулирования частоты вращения ад. Торможение ад.
В начальный момент пуска ротор неподвижен n2= 0, S=1, Е2s = Е2 S – максимально возможное значение, а значит и ток ротора имеет максимально возможное значение, т.е. многократно возрастает и ток статора. При пуске ток статора 5…7,5 Іnom . Т.о. наличие больших пусковых токов АД это первая проблема. Необходимым условием для пуска является наличие разницы между электромагнитным моментом и моментом сопротивления, чем она больше, тем разгон двигателя происходит интенсивнее и сокращается время пуска, потери энергии при пуске. Обеспечение максимального пускового момента АД это вторая проблема пуска.
Способы пуска: 1) прямой пуск, 2) при пониженном напряжении. Существует три способа пуска при пониженном напряжении: реакторный, автотрансформаторный, переключением с нормально соединения ∆ на пусковое Y. Общий недостаток при пониженном напряжении уменьшение пускового момента.
Прямой пуск это пуск АД включением на полное напряжение сети. АД проектируют так, что бы он без повреждений выдерживал кратковременный всплеск тока при пуске. Ограничение: Если напряжение питающей сети при пуске АД уменьшается более чем на 10%, то прямой пуск не применяют, т.к. уменьшение напряжения питающей сети отрицательно сказывается на других потребителях включенных в сеть. В этом случае осуществляют пуск АД при пониженном напряжении.
Способы регулирования частоты вращения следуют из формулы:
n2= n1(1-S) = 60f1/p(1-S)
Здесь возможны три различных способа реализации:
Первый заключается в изменении частоты напряжения и тока, подаваемого в обмотки двигателя. Этот способ позволяет осуществлять плавное регулирование частоты вращения двигателя.
Второй способ связан с изменением пар полюсов p на статоре.
Укладывая на статоре несколько обмоток, рассчитанных на различные числа пар полюсов (р=1,2,3,4), можно обеспечить различные частоты вращения магнитного поля (соответственно: 3000, 1500, 1000, 750 об/мин). Подключение к сети необходимой обмотки производится специальным переключателем. Этот способ регулирования ступенчатый, но в ряде металлообрабатывающих станков он нашел самое широкое применение (например, для привода продольно-строгального станка при рабочем и обратном ходе).
Третий способ регулирования частоты вращения возможен лишь для двигателей с фазным ротором. Здесь изменение скольжения S достигается введением в цепь ротора регулировочных сопротивлений. Такие схемы широко используются на грузоподъемных кранах. Увеличение скольжения не приводит к перегреву двигателя, т.к. потери мощности в цепи ротора выделяются на регулировочном реостате.
Регулирование частоты вращения ротора изменением частоты f1
Этот способ требует источника питания с регулируемым напряжением и частотой – полупроводниковый преобразователь частоты. Этот способ обеспечивает плавное регулирование в широком диапазоне, позволяет обеспечить высокий КПД и cosφ двигателя при всех реальных нагрузках. Этот способ широко применим в настоящее время.
М= Cм ФmI2акт Ф = U1/(4,44∙f1∙W1kоб1)
Пусть момент сопротивления на валу двигателя постоянен. Если изменять частоту f1 то изменяется величина магнитного потока Ф, т.е. увеличивается электромагнитный момент. Для постоянства момента необходимо одновременно с частотой изменять и напряжение. Связь между напряжением и частотой зависят от закона регулирования. Общий закон регулирования можем получить используя формулу максимального момента.
Мmax= р m1 U12/4πf1(x1+x′2) = К (U12/ f12)
Запишем Мmax для двух состояний двигателя с различными U1 , f1
М′max= К (U′1/ f ′1) 2 М′′max= К (U′′1/ f ′′1)2 возьмем отношение этих моментов: М′max/ М′′max=(U′1/ f ′1) 2/(U′′1/ f ′′1)2 разрешим уравнение относительно напряжений: U′1/ U′′1= f ′1/ f ′′1*√ М′max/ М′′max
Полученное уравнение называется закон Костенко, это общий закон частотного регулирования.
Рассмотрим общий закон регулирования для частных случаев.
1 .
При постоянстве момента на валу
(грузоподъемные механизмы, металлорежущие
станки). Согласно условию М′max=
М′′max
тогда U′1/
U′′1=f
′1/
f ′′1,
т.е. U′1/
f
′1=
U′′1/
f ′′1=const.
Закон частотного регулирования при
постоянстве момента на валу. Типичный
вид механических характеристик имеет
вид: f1=50
Гц, f2=40
Гц, f3=30
Гц, f4=20
Гц,
.
При постоянстве момента на валу
(грузоподъемные механизмы, металлорежущие
станки). Согласно условию М′max=
М′′max
тогда U′1/
U′′1=f
′1/
f ′′1,
т.е. U′1/
f
′1=
U′′1/
f ′′1=const.
Закон частотного регулирования при
постоянстве момента на валу. Типичный
вид механических характеристик имеет
вид: f1=50
Гц, f2=40
Гц, f3=30
Гц, f4=20
Гц,
2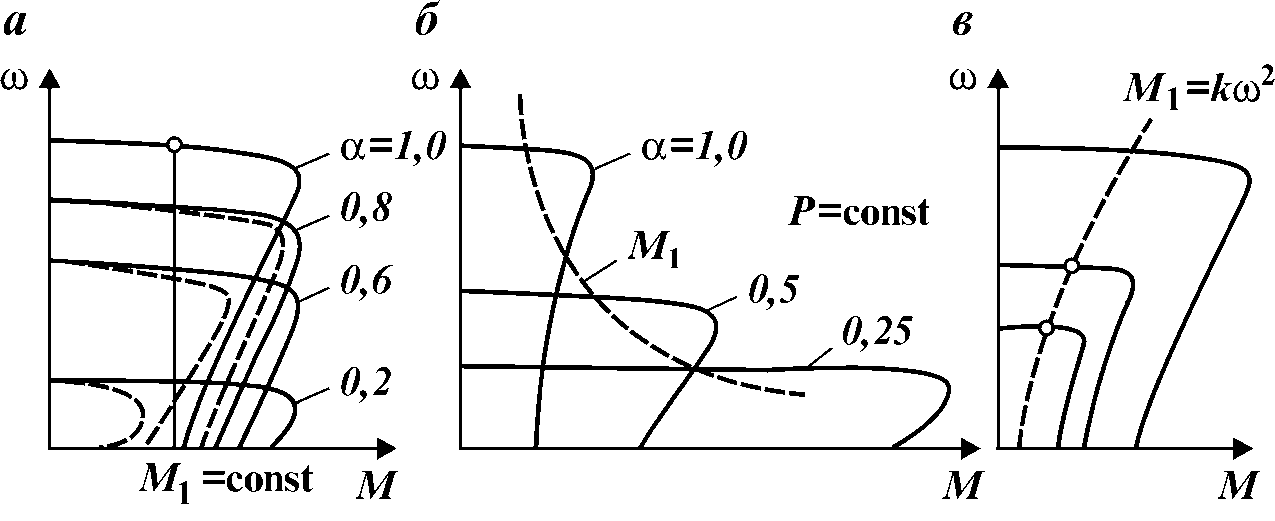 .
Регулирование при постоянной полезной
мощности.
.
Регулирование при постоянной полезной
мощности.
Р2= const. Р= Мω, используем это выражение для двух состояний двигателя. М′max ω1′ = М′′max ω′′1= const; М′max/ М′′max = ω′′1/ω1′ = f ′′1/ f ′1. Подставим это выражение в закон Костенко: U′1/ U′′1=√ f ′1/ f ′′1 – Закон регулирования частоты вращения при постоянной полезной мощности.
Регулирование частоты вращения путем переключения числа пар полюсов обмотки статора.
И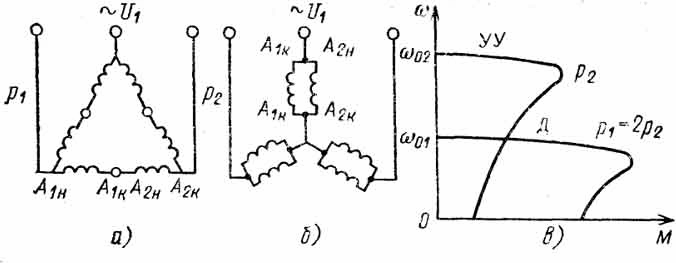 зменяя
число пар полюсов обмотки статора
получается ступенчатое изменение
частоты вращения ротора, что часто
необходимо в металлорежущих станках,
либо вентиляторы с разной производительности.
Обычно на статоре укладывают одну
обмотку, которая допускает переключение
числа пар полюсов. Каждая фазная обмотка
состоит из двух полуфаз, эти полуфазы
могут включаться последовательно или
параллельно между собой. Такая схема
включения называется схема Даландера.
Двухскоростные
двигатели имеют одну полюсопереключаемую
обмотку с шестью выводными концами.
Обмотка двигателей с соотношением
частот вращения 1 : 2 выполняется по схеме
Даландера и соединяется в треугольник
(Д) при низшей частоте вращения, и в
двойную звезду (YY) при высшей частоте
вращения.
зменяя
число пар полюсов обмотки статора
получается ступенчатое изменение
частоты вращения ротора, что часто
необходимо в металлорежущих станках,
либо вентиляторы с разной производительности.
Обычно на статоре укладывают одну
обмотку, которая допускает переключение
числа пар полюсов. Каждая фазная обмотка
состоит из двух полуфаз, эти полуфазы
могут включаться последовательно или
параллельно между собой. Такая схема
включения называется схема Даландера.
Двухскоростные
двигатели имеют одну полюсопереключаемую
обмотку с шестью выводными концами.
Обмотка двигателей с соотношением
частот вращения 1 : 2 выполняется по схеме
Даландера и соединяется в треугольник
(Д) при низшей частоте вращения, и в
двойную звезду (YY) при высшей частоте
вращения.
Переключение числа пар полюсов обмоток приводит к изменению распределения проводников с током вдоль окружности статора, т.е. изменению числа полюсов магнитного поля, создаваемого обмоткой.
В настоящее время выпускаются двухскоростные двигатели с одной обмоткой на статоре, допускающей переключения. 3-х скоростные двигатели имеющие на статоре 2-е обмотки одна ихз них допускает переключение. 4-х скоростные имеют на статоре 2-е обмотки и обе допускают переключение. Во всех случаях в полюсопереключаемых двигателях используют кз ротор, т.к. кз ротор безразличен к числу полюсов обмотки статора.
Торможение.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом. Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением.
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
К механическим относятся торможения муфтами, колодками и т.д.
Иногда применяют электродинамическое торможение, когда после отключения двигателя от сети переменного тока в его обмотки подается постоянный ток. В этом случае постоянное магнитное поле заметно сокращает выбег ротора.
Чаще используется торможение "противовыключением". После отключения двигателя от сети его кратковременно включают на вращение в обратную сторону. Как только оставшаяся частота вращения ротора n2 станет равной нулю, двигатель отключается от сети.