

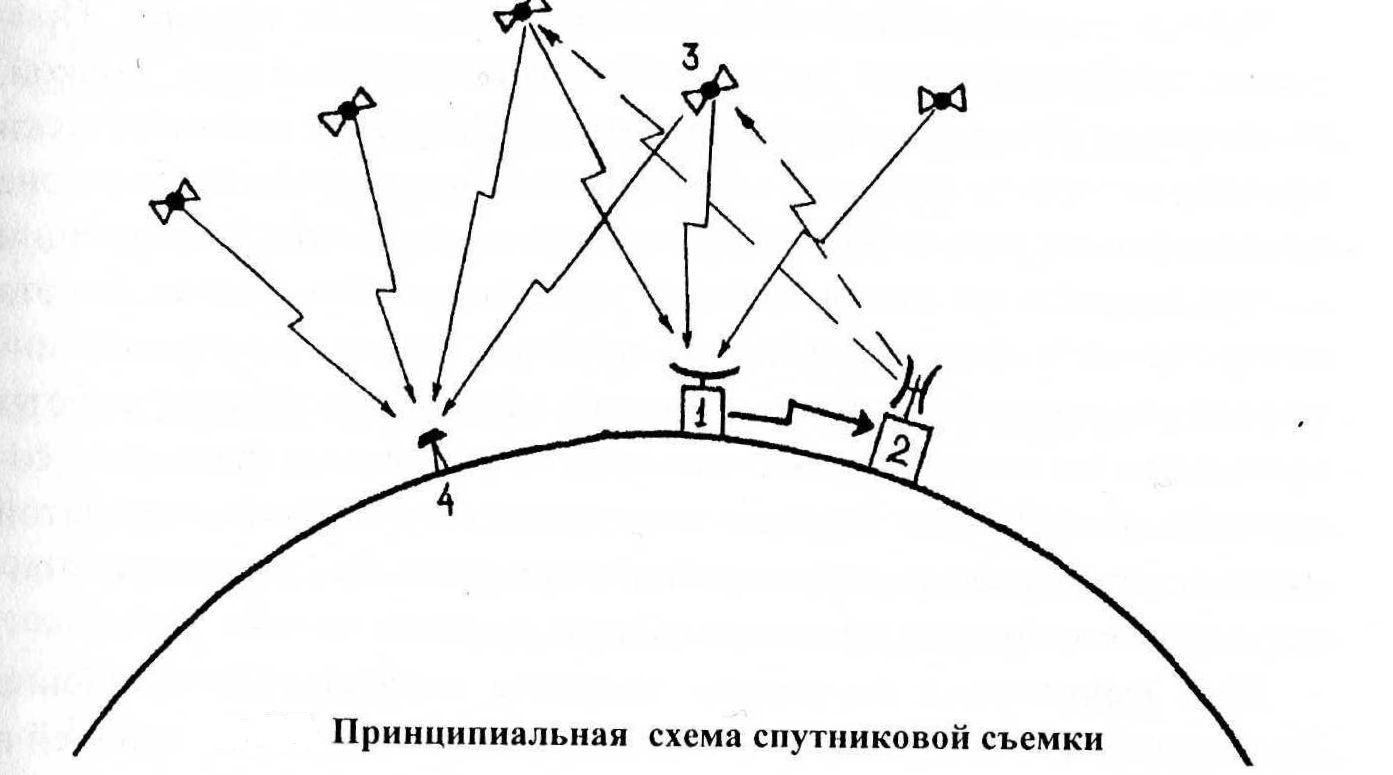
Принцип работы gps-системы.
GPS – глобальная система позиционирования. С помощью GPS-приемников осуществляется определение координат.
Спутники вращаются на высоте 20 тыс м. Минимальное количество спутников должно быть 24.
NAVSTAR
NAV – навигационная
S – Система
T – Времени
A – И
R – Расстояния
ГЛОНАСС - глобальная навигационная спутниковая система
Спутниковая система делится на 3 сегмента:
Космический – включает спутники, которые вращаются вокруг Земли (для определения координат необходимо 4 спутника)
Сегмент контроля и управления – включает в себя управленческие станции которые равномерно расположены на земном шаре, контролируют вращение спутников, высокоатомные часы, их движение
Сегмент пользователя – люди с GPS определяют координаты по принципу линейной засечки, то есть нужны 3 точки с известными координатами и их длины. По временным меркам GPS определяет, потом умножает на скорость света 300000 и получает расстояние.
Во время прохождения сигнала от спутника к GPS сигнал искажается. Чтобы это исправить, ставят 2 приемника, базовый приемник вводит поправку (ионосферную) и определяет координаты. Расстояние между базовым и роверным приемником должно быть не более 100км (могут пойти ошибочные данные). GPS работает в мировой системе координат.
28.Технологии gps-съемок
1. СТАТИКА
Статический режим - это прямой подход к созданию геодезической сети спутниковым методом. Он наиболее прост в смысле организации работы по заранее составленному графику и позволяет получать наиболее точные результаты. Все точные и высокоточные опорные геодезические сети создают этим методом. При работе в этом режиме оператору требуется час-полтора, чтобы гарантировать успех разрешения многозначности и получить результат с ошибкой в пределах сантиметра. Чтобы повысить точность, необходимы более длительные наблюдения. Все эти временные интервалы несопоставимы с тем временем, которое наблюдатель, использующий традиционные наземные методы, проводил на пункте раньше.
2.КИНЕМАТИКА
Кинематический режим, который иногда называют динамическим, - широкое понятие. В этом режиме, например, работает непрерывно перемещающийся в процессе работы приемник, установленный на борту самолета, выполняющего аэрофотосъемку. Приемник определяет координаты самолета в момент срабатывания затвора аэрофотоаппарата. Есть и другие примеры работы приемника, находящегося в движении непрерывно. Нас же интересует случай, когда приемник перемещают с пункта на пункт, совершая краткие остановки на каждом пункте. Такой режим называют stop-and-go - «стой и иди», именно его называют кинематическим
29.Создание опорной и съемочной маркшейдерской сети gps-приёмником Trimble4600
Один из приемников помещается на точку с известными координатами (роверный), а другой помещается на точку, пространственное положение которой необходимо определить. В течение 40 минут производится наблюдение базовой линии, после чего приемник перемещается на следующую точку. При помощи программы идет обработка данных.