

Цилиндр, катающийся в подвижном желобе
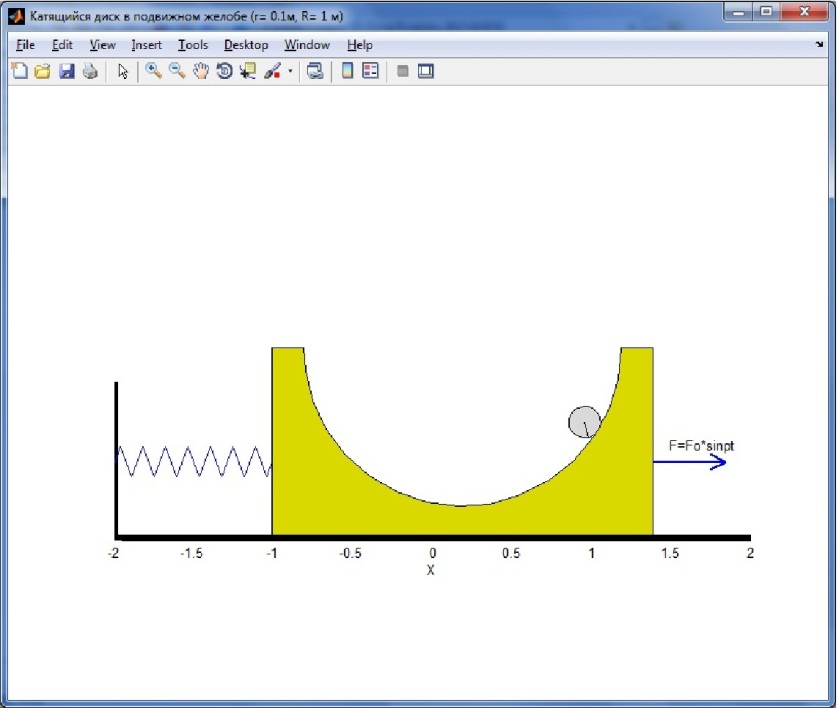
В качестве следующего примера выбран катящийся цилиндр в подвижном желобе.
В
брусе массы m1
сделана цилиндрическая выточка радиуса
R, в которой катается без скольжения
однородный круглый цилиндр массы m2
и радиуса r. Оси выточки и цилиндра
параллельны. Брус двигается по гладкой
горизонтальной плоскости под действием
горизонтальной силы F=F0
sin
pt, силы упругости Fупр
= –cx и силы сопротивления Fсопр
=–k .
Ось пружины горизонтальна. При x=0 пружина
не деформирована.
.
Ось пружины горизонтальна. При x=0 пружина
не деформирована.
Уравнения движения Лагранжа 2-го рода имеют вид:


Зададим численные значения параметров и начальных условий:
|
|
|
|
|
|
|
|
|
|
|
|
 кг
кг м
м м
м Н
Н с-1
с-1 Н/м
Н/м Нс/м
Нс/м м
м рад
рад м/с
м/с с-1
с-1Для рассматриваемой голономной механической системы в качестве обобщенных координат приняты x, φ.
Задание.
Создайте файл dinamika.m и напишите функции dinamika и f аналогично алгоритму уже рассмотренной задачи визуализации динамики диска с маховиком. В функции dinamika необходимо реализовать:
запрос данных о численных параметрах системы и начальных условиях интегрирования системы;
интегрирование заданных уравнений движения;
построение фазовых портретов;
визуализацию динамики системы.
Запрос данных о численных параметрах системы «цилиндр в подвижном желобе» вынесите в отдельный скрипт аналогично вышерассмотренному скрипту param для диска с маховиком. Не выписывая полностью исходный код функции Param, укажем значения параметров по умолчанию для рассматриваемой системы.
g=9.8; % м/сек
m1=5; % Масса тележки (кг)
m2=1; % Масса цилиндра (кг)
R=1; % Радиус выемки
r=0.1; % Радиус цилиндра
c=10 ; % Жесткость пружины (н/м)
k=3; % Коэфф. сопротивления
Fo=1; % Амплитуда силы (н)
p=0.4; % Циклич. частота (1/сек)
t0=0; % Начальное время интегрирования (сек)
y0=' 0.1 , 1 , 0 , 0 ' ; % Начальные условия (задача Коши) - вектор-столбец из величин x, fi, dx/dt, dfi/dt .
tfin= 5; % Конечное время интегрирования (сек)
step=0.05; % Шаг выдачи результатов интегрирования (сек)
% Параметры пружины :
n_w=7; %10; % Кол-во витков
l_=0.2; 0.3; % Длина одного звена пружины
h_kr=0.5; % Высота точки крепления пружины
% Изображение вектора силы
Foo=0.5; % Длина вектора изображения силы Fo
lstr=Foo/5; % Длина стрелки изображения силы Fo
Ostr=pi/6; % Угол острия стрелки изображения силы Fo
Ниже приводится исходный код функции f0, f1 из файла Kadr. Как и прежде, Kadr предназначен для визуализации системы, вызывается из функции dinamika. F0 и f1 предназначены для полной и частичной перерисовки изображения аналогично вышерассмотренным одноименным функциям в примере «диск с маятником».
function f0(t,x)
global r R p hhh h_kr Foo lstr Ostr h_kola text1 text2 text3 text4 xlm
global h_fig h_J h_vert h_D h_r h_pruj h_F h_txt h_txt2
x1=x(1); % Середина ползуна
% Первоначальное построение
h_fig=figure('Position',[50 50 800 600],...%Положение верхнего угла, ширина, высота окна
'NumberTitle','off','Color',[1 1 1],'Tag','fig',...
'Resize','on','Name',...
['Катящийся диск в подвижном желобе (r= ',num2str(r),'м, R= ',num2str(R),' м)']);
xlm=2;
xlim([-xlm xlm]); % Задание "размера" оси х
set(gca,'Tag','Osi')
set(gca,'ActivePositionProperty','position')
set(gca,'Box','off')
set(gca,'YColor','w')
axis('equal');
text1='F=Fo*sinpt'; % Текст вблизи вектора силы
text2='t= '; text3=num2str(t); text4=' sec';
h_txt2=text(xlm*0.8,xlm*0.9,[text2,text3,text4]);
hold on;
h_plane=0.02; % Высота неподвижной плоскости
h_kola=1; % Высота кола
%Неподвижное основание и кол :
h_osnov=line([-2 -2 2],[h_kola h_plane h_plane],'LineWidth',5,'Color','k');
%Формирование желоба
hhh=1.2*R+h_plane; % Высота ползуна
thp=0:pi/20:pi; % Выемка желоба :
xp=R*cos(thp); % справа (вниз) налево
yp=-R*sin(thp);
% Координаты контура ползуна. Начальный сдвиг желоба на величину x(1)
xp=x1+[xp,-(1.2*R),-(1.2*R),(1.2*R),(1.2*R) ];% Сдвиг желоба на величину x(1)
yp=hhh+[yp,0,-(1.2*R),-(1.2*R),0 ];
h_J=fill(xp,yp,[0.85, 0.85, 0],'Clipping','off',...
'Tag','Jelob'); %Рисование и заливка желоба цветом
ylim([0 2]); % (2) Ось y строится с нуля
%Вектор силы, приложенной к ползуну :
xbeg=x1+1.2*R; % Координаты начала вектора
ybeg=h_kola/2; % Координаты начала вектора
Ugol=0; % Задаем направление
F=Foo*sin(p*t); % Проекция вектора на заданное направление
[xF,yF]=Vector_(xbeg,ybeg,Ugol,F,lstr,Ostr);
h_F=line(xF,yF,'LineWidth',2,'Color',[0, 0, 1]);
h_txt=text(x1+1.2*R+0.1,h_kola/2+0.1,text1); %Координаты начала текста
% в единицах разметки осей
% Параметры пружины :
L=abs(x1-1.2*R+2); % Текущая длина пружины (расст. от кола до левого края ползуна)
x12=[-2,-2+L]; % Координаты x концов пружины
y12=[h_kr,h_kr]; % Координаты y концов пружины
[x_,y_]=Prujina_(x12,y12); % Координаты концов звеньев пружины
h_pruj=line(x_,y_); % Первоначальное построение пружины
% Коррекция свойств осей
set(gca,'Box','off')
set(gca,'ActivePositionProperty','position')
set(gca,'CameraPositionMode','manual')
xlabel('X');
ylabel('Y');
axis('on');
hold on;
%Формирование центральной линии желоба
c1_x=x1;
c1_y=hhh+[0 -R];
h_vert=plot(c1_x,c1_y,'k--','Visible','off'); % Отмена/рисование центр. линии желоба
% Начальное положение диска
tet=x(2);
xc=x1+(R-r)*sin(tet); % Координата x центра диска
yc=hhh-(R-r)*cos(tet); % Координата y центра диска
[xd,yd]=Okr_(xc,yc,r); %Фoрмирование контура диска
% Начальное положение метки диска
psi=tet*(R-r)/r; % Угол поворота диска
xm_c=r*sin(psi); % Проекция радиуса-метки на ось x
ym_c=r*cos(psi); % Проекция радиуса-метки на ось y
xm= xc+xm_c; % Координата x конца метки
ym=yc+ym_c; % Координата y конца метки
h_D=fill(xd,yd,[0.85, 0.85, 0.85]); % Диск
h_r=plot([xc xm],[yc ym], 'k--'); % метка
hold on;
Исходный код вспомогательной функции f1.
function f1(t,x)
global r R Foo lstr Ostr p t_pause k_uskor hhh h_kr h_kola text1 text2 text3 text4 xlm
global h_J h_vert h_D h_r h_pruj h_F h_txt h_txt2
x1=x(1); % Середина ползуна
%Формирование текущего положения желоба
thp=0:pi/20:pi;
xp=R*cos(thp);
yp=-R*sin(thp);
% Координаты контура ползуна (сдвиг желоба на величину x(1) )
xp=x1+[xp,-(1.2*R),-(1.2*R),(1.2*R),(1.2*R) ]; % Сдвиг желоба на величину x(1)
yp=hhh+[yp,0,-(1.2*R),-(1.2*R),0 ];
% Параметры пружины :
L=abs(x1-1.2*R+2); % Текущая длина пружины (расст. от кола до левого края ползуна)
x12=[-2,-2+L]; % Координаты x концов пружины
y12=[h_kr,h_kr]; % Координаты y концов пружины
[x_,y_]=Prujina_(x12,y12); % Координаты концов звеньев пружины
%Вектор силы, приложенной к ползуну :
xbeg=x1+1.2*R; % Координаты начала вектора
ybeg=h_kola/2; % Координаты начала вектора
Ugol=0; % Задаем направление
F=Foo*sin(p*t); % Проекция вектора на заданное направление
[xF,yF]=Vector_(xbeg,ybeg,Ugol,F,lstr,Ostr);
delete(h_txt);
h_txt=text(x1+1.2*R+0.1,h_kola/2+0.1,text1); %Координаты начала текста в
% единицах разметки осей
if round(t)-t==0 % Показ времени
delete(h_txt2);
text3=num2str(t);
h_txt2=text(xlm*0.8,xlm*0.9,[text2,text3,text4],...
'BackgroundColor',[.7 .9 .7],'LineWidth',2 ); %Координаты показа t=
end;
%Формирование центральной линии желоба
c1_x=x1;
c1_y=hhh+[0 -R];
%Искусственное расширение графика (по высоте) для исключения эффекта
%движения неподвижного основания. Иначе матлаб динамически подгоняет
% размеры под реальные (можно отключить опцию Resize = on ).
set(h_vert,'EraseMode','none');
% Текущее положение диска
tet=x(2);
xc=x1+(R-r)*sin(tet); % Координата x центра диска
yc=hhh-(R-r)*cos(tet); % Координата y центра диска
[xd,yd]=Okr_(xc,yc,r); %Фoрмирование контура диска
% Текущее положение метки на диске
psi=tet*(R-r)/r; % Угол поворота диска
xm_c=r*sin(psi); % Проекция радиуса-метки на ось x
ym_c=r*cos(psi); % Проекция радиуса-метки на ось y
xm= xc+xm_c; % Координата x конца метки
ym=yc+ym_c; % Координата y конца метки
pause(t_pause/k_uskor); % Ускорение/замедление показа
set(h_J,'XData',xp);
set(h_J,'YData',yp);
set(h_vert,'XData',c1_x);
set(h_vert,'YData',c1_y);
set(h_D,'XData',xd);
set(h_D,'YData',yd);
set(h_r,'XData',[xc xm]);
set(h_r,'YData',[yc ym]);
set(h_pruj,'XData',x_);
set(h_pruj,'YData',y_);
set(h_F,'XData',xF);
set(h_F,'YData',yF);
Задания.
Отладить и запустить программу визуализации динамики цилиндра, катающегося в подвижном желобе.
Для системы «цилиндр, катающийся в подвижном желобе» написать программу:
нахождения положения равновесия,
линеаризации дифференциальных уравнений в окрестности найденного положения равновесия,
составления характеристического уравнения
нахождения его корней.
При написании программы можно опираться на алгоритм, реализованный в разделе «Диск с маятником. Уравнения равновесия системы».
Какие динамические эффекты можно наблюдать в рассматриваемой системе? Попробуйте воспроизвести их.