Спираль
Входные параметры:
r1,r2,fi1,fi2 – полярные координаты концов спиральной пружины
Wit – количество витков
Выходные параметры:
x, y – координаты точек, составляющих спираль.
function [x,y]=Spiral_(r1,r2,fi1,fi2,Wit)
fi=0 : pi/30 : fi2-fi1 + 2*pi*Wit;
r=r1+(r2-r1)/(fi2-fi1+2*pi*Wit)*fi;
x=r.*cos(fi);
y=r.*sin(fi);
Пример вызова:
Wit=3
r1=0.05;
r2=0.3;
fi1=0
fi2=0.5
[x,y]=Spiral_(r1,r2,fi1,fi2,Wit);
h_plot=plot(x,y)
xlm=0.5;
xlim([-xlm xlm]); % Задание "размера" оси х
axis equal
tic
N=200;
step=0.05
for i=1:N
fi2=fi2+step;
[x,y]=Spiral_(r1,r2,fi1,fi2,Wit);
% Перепостроение графиков
pause(0.01);
set(h_plot,'XData',x);
set(h_plot,'YData',y);
end;
toc
Результат вызова:

Пружина
Входные параметры:
координаты x и y начала и конца пружины.
Выходные параметры
x,y координаты изломов пружины.
Число n_w изломов пружины и длину l_ участка пружины, соединяющего две вершины пружины, определим как глобальные переменные. Для построения изображения в вызывающей программе после выполнения программы необходимо вызвать команду line(x,y) или plot(x,y).
function [x,y]=Prujina_(x12,y12)
global n_w l_
% Вычисление координат изломов пружины в исходном горизонтальном положении
% с началом в точке (0,0) :
x1=x12(1); y1=y12(1);
x2=x12(2); y2=y12(2);
L=sqrt((x1-x2)^2+(y1-y2)^2); % Текущая длина пружины
Lmax=2*n_w*l_;
if Lmax- L >= 0 % Проверка условия существования пружины с такими параметрами
del=L/n_w/2; % Половина длины шага пружины (половина расстояния между соседними зубцами)
r_=sqrt(l_^2-del^2)/2; %
x0=[0 del/2 : del : L-del/2 L]; % Координаты x изломов пружины
y_v=r_*ones(1,n_w); % Координаты y верхних изломов пружины
y_n=-r_*ones(1,n_w); % Координаты y нижних изломов пружины
y_vn=[y_v;y_n]; % Слияние координат y в матрицу
sz=size(y_vn);
y__= reshape(y_vn,1,sz(1)*sz(2)); % Преробразование матрицы 2хn в матрицу 1х2n, т.е. вектор.
y0=[0 y__ 0]; % Добавление крайних точек
else
disp('Увеличь максимальную длину Lmax пружины!')
beep
end
% Вычисление координат изломов пружины в повернутом положении
% с началом в точке (0,0) :
stet=(y2-y1)/L; % Синус и косинус угла поворота пружины
ctet=(x2-x1)/L;
x=x0*ctet-y0*stet+x1;
y=x0*stet+y0*ctet+y1;
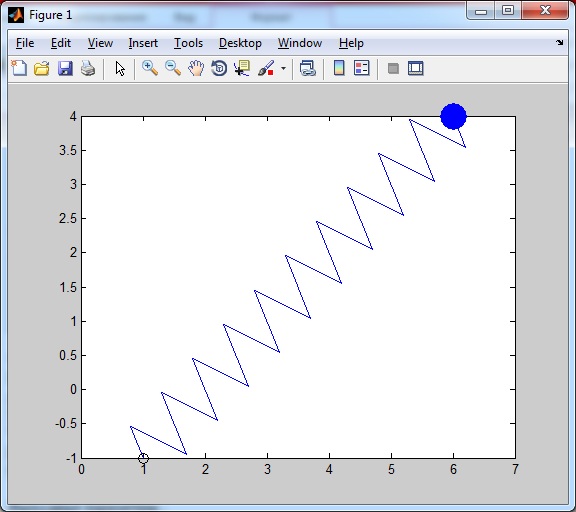
Пример вызова:
global n_w l_
figure(1)
n_w=10 % Число витков
l_=1 % Длина звена
x12=[0 5] % Координаты x концов пружины
y12=[0 5] % Координаты y концов пружины
[x,y]=Prujina(x12,y12); % Вычисление координат изломов пружины
hold off
plot(x,y); % Построение пружины
% Координаты начала текста :
xt=x12(1)+(x12(2)-x12(1))/5;
yt=y12(1)+(y12(2)-y12(1))/2;
ht=text(xt,yt,'Press ','FontSize',18)
pause(0.5)
ht=text(xt,yt,' Enter !','FontSize',18)
pause
x12=x12+1;
y12=y12-1;
xbeg=x12(1);
xend=x12(2);
ybeg=y12(1);
yend=y12(2);
[x,y]=Prujina(x12,y12); %Координаты изломов пружины
plot(x,y); % Построение пружины
% Добавление маркеров на концах пружины :
h_beg=line(xbeg,ybeg, 'Marker','o','MarkerSize',8,'LineWidth',1,'Color','k');
h_end=line(xend,yend, 'Marker','.','MarkerSize',60,'Color','b');
Результат:

После нажатия кнопки Enter:
Вектор
Входные параметры:
xbeg,ybeg - координаты начала вектора
Ugol (рад) - угол между осью x и направлением вектора
V=2 - проекция вектора на заданное направление
lstr - длина стрелки на конце вектора
Ostr - угол полураствора стрелки
Выходные параметры :
x,y - координаты элементов вектора
function [x,y]=Vector_(xbeg,ybeg,Ugol,V,lstr,Ostr)
% Сначала горизонтальный вектор
x_=[xbeg, xbeg+ V ]; % Горизонтальный отрезок
y_=[ybeg , ybeg ]; % Горизонтальный отрезок
sgnV=sign(V);
xs=[x_(2)-sign(V)*lstr, x_(2),x_(2)-sign(V)*lstr]; % Стрелка на конце
h=sin(Ostr)*lstr;
ys=[ybeg+ h , ybeg, ybeg- h]; % Стрелка на конце
x__=[x_, xs]; % объединение отрезка и стрелки
y__=[y_, ys]; % объединение отрезка и стрелки
% Поворот горизонтального вектора вокруг начала на угол Ugol
sU=sin(Ugol); % Синус и косинус угла поворота
cU=cos(Ugol);
x=x__*cU-y__*sU;
y=x__*sU+y__*cU;
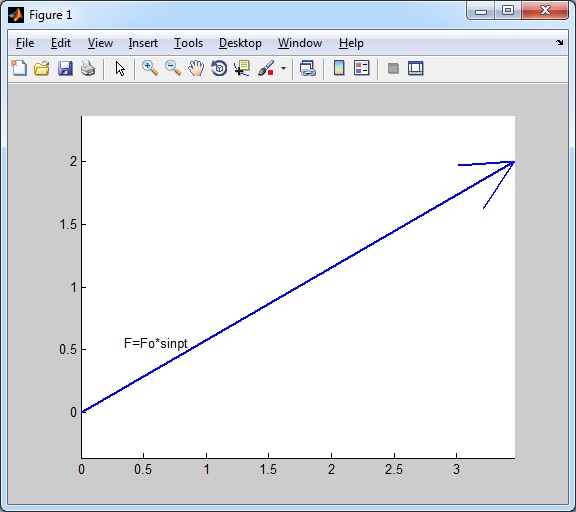
Пример вызова:
xbeg=0
ybeg=0
Ugol=pi/6 % Направление вектора
V=4; -2 % Проекция вектора на заданное направление
Lstr=0.4 % Длина стрелки
Ostr=pi/6 % Угол раствора стрелки
[x,y]=Vector_(xbeg,ybeg,Ugol,V,Lstr,Ostr);
h_F=line(x,y,'LineWidth',2,'Color',[0, 0, 1]);
axis equal
text1='F=Fo*sinpt';
xlm=xlim; % Границы оси x
ylm=ylim; % Границы оси y
xtxt=xbeg+(xlm(2)-xlm(1))/10; %Координаты начала текста
ytxt=ybeg+(ylm(2)-ylm(1))/5; %Координаты начала текста
h_txt=text(xtxt,ytxt,text1); % в единицах разметки осей
Результат: