

5.5 Аппаратура дп
Функциональная схема цифрового автомата диспетчерского пункта (ЦА ДП) представлена на рисунке 5.13.
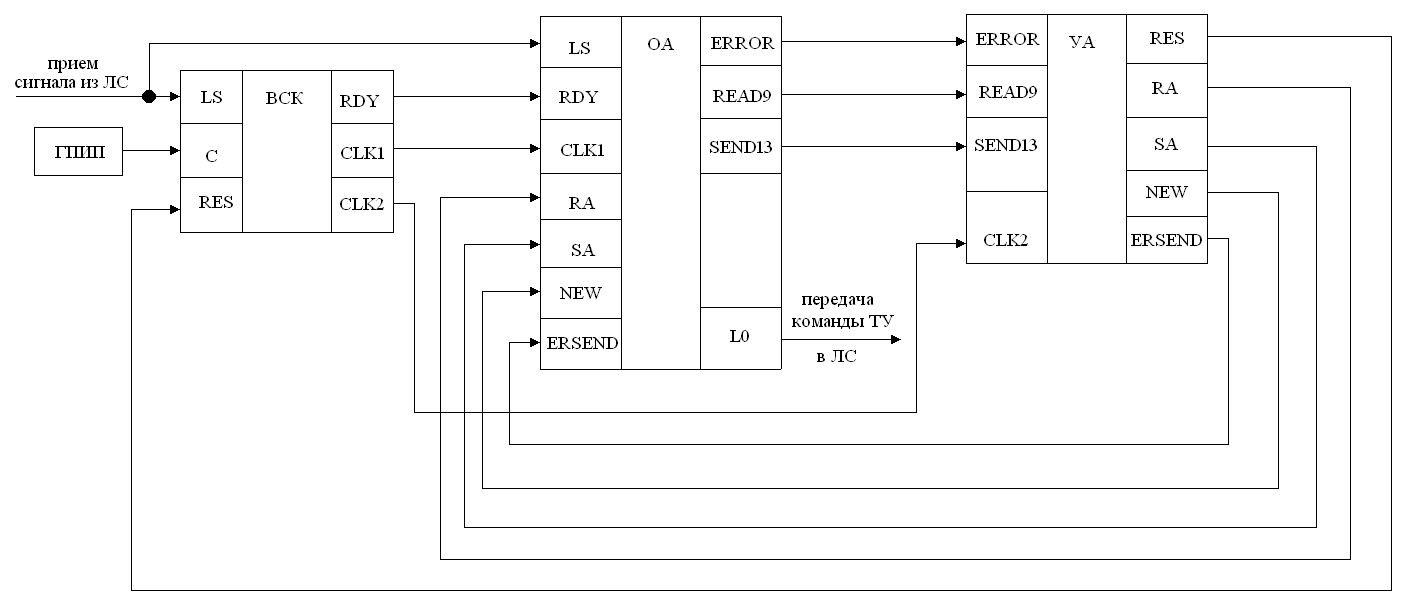
Рисунок 5.13 – Функциональная схема ЦА ДП
На выше приведенной функциональной схеме приняты следующие сокращения:
LS – вход из линии связи;
L0 – выход в линию связи;
С – синхронизация триггеров и счетчика ВСК;
RES – сброс ВСК;
CLK1, CLK2 – синхросерии для операционного автомата (ОА) и управляющего автомата (УА) соответственно;
RDY – сигнал успешного приема синхрокомбинации;
RA – разрешение приема команды ТС из ЛС для ОА;
SA – разрешение на передачу команды ТУ в ЛС для ОА;
NEW – разрешение на запоминание новой принятой команды ТС;
ERROR – сигнал наличия ошибки в принятой команде ТС;
ERSEND – сигнал отсутствия ответа со стороны ИП;
SEND13 – сигнал об окончании передачи команды ТУ в ЛС (передано 13 бит).
Номер отправляемой команды ТУ набирается на панели диспетчерского пункта при помощи соответствующих кнопок. При этом набираемый номер команды ТУ одновременно выводится на семисегментных индикаторах.
Номер ИП, которому необходимо отправить команду ТУ, набирается также при помощи соответствующих кнопок и одновременно выводится на семисегментном индикаторе. Кнопки и семисегментные индикаторы расположены на панели диспетчерского пункта. Далее по нажатию кнопки ”ПОСЫЛКА” данная команда ТУ посылается в линию связи. При этом со стороны ОА вырабатывается сигнал SEND13=1, сигнализирующий об окончании передачи команды ТУ в ЛС. Данный сигнал воздействует на УА ДП, со стороны которого вырабатывается сигнал SA=0, запрещающий передачу информации в ЛС.
ОА
переходит в состояни е
ожидания поступления команды ТС со
стороны ИП. Если через промежуток
времени, равный tожид
команда ТС не поступит, то команда ТУ
посылается повторно. Если и во второй
раз команда ТС не поступит на приемную
часть ОА ДП по истечении промежутка
времени, равного tожид,
то загорается светодиод “Ошибка
передачи. Нарушена линия связи” на
панели ДП. При этом вырабатывается
сигнал RES=1,
который сбрасывает ВСК и возвращает
автомат ДП в исходное состояние.
е
ожидания поступления команды ТС со
стороны ИП. Если через промежуток
времени, равный tожид
команда ТС не поступит, то команда ТУ
посылается повторно. Если и во второй
раз команда ТС не поступит на приемную
часть ОА ДП по истечении промежутка
времени, равного tожид,
то загорается светодиод “Ошибка
передачи. Нарушена линия связи” на
панели ДП. При этом вырабатывается
сигнал RES=1,
который сбрасывает ВСК и возвращает
автомат ДП в исходное состояние.
Если команда ТС поступит на ДП, то первоначально ВСК проверит наличие в линии связи необходимой синхрокомбинации (1111) для того, чтобы быть уверенным, что принимаемая информация это действительно команда ТС, а не помеха. При этом вырабатывается сигнал RDY, сообщающий ОА об успешном приеме синхрокомбинации. При этом управляющий автомат (УА) вырабатывает сигнал RA=1, разрешающий подачу тактовых импульсов в приемный регистр. С этого момента информация начинает проходит на вход сдвигающего регистра, преобразующего последовательный код в параллельный и работающий по переднему фронту тактового импульса CLK1. Одновременно с этим запускается счетчик, подсчитывающий количество принятых бит информации. В нашему случае нам необходимо принять 9 бит (4 бита адреса, 4 бита команды ТС и 1 контрольный бит проверки на четность). После того, как счетчик отсчитает 9 принятых битов информации, формируется сигнал READ9=1. Данный сигнал воздействует на УА, который в свою очередь вырабатывает сигнал RA=0, запрещающий прохождение тактовых импульсов в приемный регистр.
С этого момента начинается обработка принятой информации.
Сначала осуществляется проверка принятой команды на четность. Если проверка на четность прошла успешно, то адрес ответившего ИП и номер принятой команды ТС высвечиваются на семисегментных индикаторах, расположенных на панели ДП.
Если же проверка на четность завершилась неудачей, то вырабатывается сигнал ERROR=1, загорается светодиод “Ошибка при приеме команды ТС”. При этом УА ИП вырабатывает сигнал RES=1, который сбрасывает ВСК и обработка принятой команды прекращается.
На этом рабочий цикл аппаратуры ДП прекращается.
Как
было сказано в ыше,
в качестве
исполнительных пунктов рассматриваются
машины-насосы, предназначенные для
орошения полей. На каждом исполнительном
пункте при этом установлено по восемь
насосов. На панели диспетчерского пункта
расположены 72 светодиода, которые
предназначены для отображения состояния
каждого из насосов на каждом исполнительном
пункте. Напротив номеров насосов, которые
в данный момент включены, горит светодиод.
ыше,
в качестве
исполнительных пунктов рассматриваются
машины-насосы, предназначенные для
орошения полей. На каждом исполнительном
пункте при этом установлено по восемь
насосов. На панели диспетчерского пункта
расположены 72 светодиода, которые
предназначены для отображения состояния
каждого из насосов на каждом исполнительном
пункте. Напротив номеров насосов, которые
в данный момент включены, горит светодиод.
5.5.1
Операционный автомат ДП (О А
ДП)
А
ДП)
5.5.1.1 Приемник ОА ДП
Принципиальная схема приемника ОА ДП представлена на рисунке 5.14:
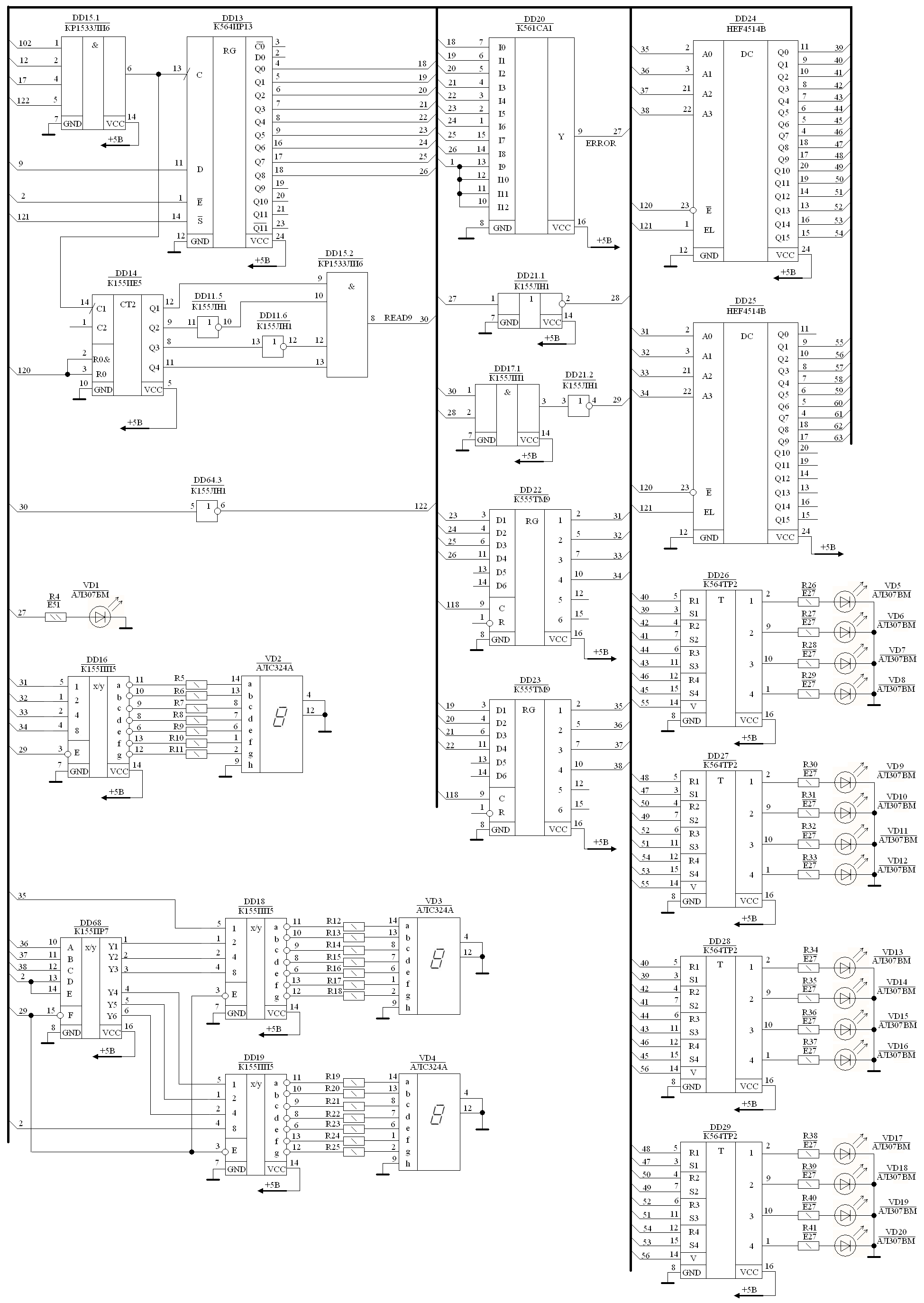
Рисунок 5.14 – Принципиальная схема приемника ОА ДП
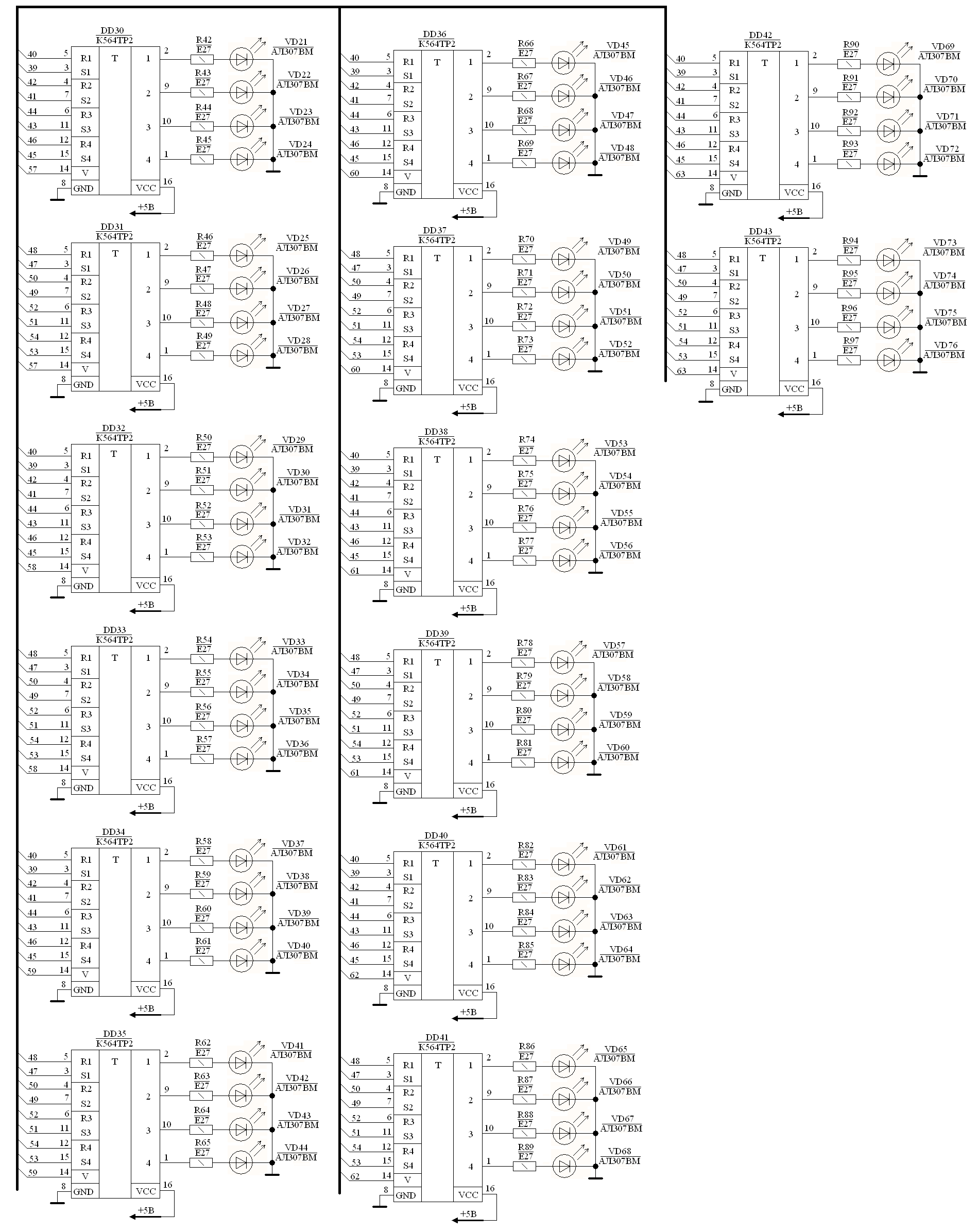
Рисунок 5.15 – Принципиальная схема приемника ОА ДП (продолжение)
Рассмотрим принцип работы приемника ОА ДП.
Сигнал
из линии связи поступает на вход
сдвигающего регистра DD13, который
преоб разует
последовательный код в параллельный и
работает по нарастающему фронту тактового
импульса CLK1. Серия синхроимпульсов CLK1
проходит на вход данного сдвигающего
регистра только после удачного приема
синхрокомбинации выявителем
синхрокомбинации (на входе RDY ОА ДП
появится логическая единица). Сигнал
RA вырабатывается управляющим автоматом
(УА).
разует
последовательный код в параллельный и
работает по нарастающему фронту тактового
импульса CLK1. Серия синхроимпульсов CLK1
проходит на вход данного сдвигающего
регистра только после удачного приема
синхрокомбинации выявителем
синхрокомбинации (на входе RDY ОА ДП
появится логическая единица). Сигнал
RA вырабатывается управляющим автоматом
(УА).
Одновременно с этим при появлении сигнала RDY начинает свою работу счетчик DD14. Счетчик DD14 предназначен для подсчета принятых битов. В данном случае нам необходимо принять 9 бит (4 бита адреса ИП, пославшего команду ТС, 4 бита команды телесигнализации и 1 контрольный бит проверки на четность). Счетчик DD14 срабатывает по переднему фронту синхроимпульсов CLK1. После того как счетчик отсчитает 9 бит принятой информации, вырабатывается сигнал READ9=1, сигнализирующий об окончании приема. Сигнал READ9 выделяется конъюнктором DD15.2 на выходе счетчика. Данный сигнал закрывает логический ключ, реализованный на конъюнкторе DD15.1 и тем самым запрещает прохождение тактовых импульсов в приемный регистр DD13 и в счетчик DD14. Таким образом фиксируется сигнал READ9=1.
С этого момента начинается обработка принятой информации.
Первоначально принятая команда проверяется на четность. Контроль на четность реализована на микросхеме К561СА1 (13-разрядная схема контроля четности). Если проверка на четность прошла успешно, то на выходе Y данной микросхемы мы имеем низкий уровень сигнала. Если проверка на четность не прошла (нечетное количество пораженных битов принятой команды), то на выходе Y мы имеем высокий уровень сигнала, что соответствует сигналу ошибки ERROR, при котором загорается красный светодиод VD1, сигнализирующий о наличии ошибки в принятой команде ТС.
Если же проверка на четность прошла успешно, то сохраняем принятую команду в регистрах DD22 и DD23. В регистр DD22 записываются четыре адресных бита принятой команды ТС, а в регистр DD23 – 4 бита самой команды ТС.
Далее выводим на семисегментные индикаторы номер ответившего ИП и номер принятой команды ТС.
Рассмотрим сначала вывод на семисегментный индикатор номер принятой команды ТС.
Заметим,
что согласно техническому заданию
количество исполнительных пунктов
равно 9. Следовательно, двоичный код,
содержащий номер ответившего ИП совпадает
с двоично-десятичным кодом .
Четыре адресных бита принятой команды
ТС преобразуем в код семисегментного
индикатора при помощи микросхемы К155ПП5
(DD16).
И далее выводим результат на семисегментном
индикаторе VD2.
.
Четыре адресных бита принятой команды
ТС преобразуем в код семисегментного
индикатора при помощи микросхемы К155ПП5
(DD16).
И далее выводим результат на семисегментном
индикаторе VD2.
Далее выводим на семисегментный индикатор номер ответившего ИП.
Для этого прежде всего двоичный код, состоящий из четырех бит принятой команды ТС, преобразуем в двоично-десятичный код при помощи микросхемы К155ПР7 (DD68). Работа микросхемы К155ПР7 разрешается (путем подачи на вход разрешения F логического 0) только при одновременном выполнении двух условий:
счетчик DD14 отсчитает 9 бит принятой информации;
проверка на четность принятой команды ТС прошла успешно (на выходе микросхемы DD20 логический ноль).
Младший разряд (разряд единиц) передается мимо микросхем, так как он совпадает в двоично-десятичном и двоичном кодах.
Далее при помощи микросхемы К155ПП5 полученные двоично-десятичный код преобразуем в код семисегментного индикатора.
И далее выводим результат на семисегментных индикаторах VD3 и VD4.
В качестве исполнительных пунктов рассматриваются машины-насосы, предназначенные для орошения полей. На каждом исполнительном пункте при этом установлено по восемь насосов. На панели диспетчерского пункта расположены 72 светодиода (VD5-VD76), которые предназначены для отображения состояния каждого из насосов на каждом исполнительном пункте. Напротив номеров насосов, которые в данный момент включены, горит светодиод.
Для нормирования тока элементов индикаторов и светодиодов VD5-VD76 между ними и выводами микросхем включены ограничительные резисторы.
Номинальный ток элементов семисегментного индикатора АЛС324А равен 20мА.
Определим величину сопротивления R5-25 каждого из нагрузочных резисторов (R5-R25), включенных между элементами индикаторов и выводами микросхем К155ПП5.
![]()
![]() . (5.10)
. (5.10)
Выберем
номинал сопротивлений R 5-R25
из ряда номиналов Е24 равным:
5-R25
из ряда номиналов Е24 равным:
R5-25 = 270Ом. (5.11)
Определим мощность, рассеиваемую на сопротивлении R5-R25:
![]() . (5.12)
. (5.12)
Номинальный ток светодиода АЛ307БМ равен 10мА.
Определим величину сопротивления R4 являющегося нагрузочным резистором для светодиода VD1.
![]() . (5.13)
. (5.13)
Выберем номинал сопротивления R4 из ряда номиналов Е24 равным:
R4 = 510Ом. (5.14)
Определим мощность, рассеиваемую на сопротивлении R4:
![]() . (5.15)
. (5.15)
Номинальный ток светодиода АЛ307ВМ равен 20мА.
Определим величину сопротивления R26-97 каждого из нагрузочных резисторов (R26-R97), включенных между светодиодами АЛ307ВМ и выводами микросхем К564ТР2.
![]() . (5.16)
. (5.16)
Выберем номинал сопротивлений R26-R97 из ряда номиналов Е24 равным:
R26-97 = 270Ом. (5.17)
Определим мощность, рассеиваемую на сопротивлении R26-R97:
![]() . (5.18)
. (5.18)