

Казанский Государственный Технический Университет
им. А. Н. Туполева
Кафедра Автоматики и Управления Курсовая работа по дисциплине: Теория Автоматического Управления
Выполнил студент гр. 3319:
Козырева Т.А.
Подпись:
Проверил:
Колчин А. В.
Подпись:
Дата сдачи:
Оценка:
Казань 2005
Введение.
Теория автоматического управления в настоящее время является самой перспективной и развивающейся наукой. Это обусловлено тем, что автоматическое управление различными объектами приводит к необходимости разработки и создания сложных систем, включающих в себя вычислительные машины, автоматические регуляторы, исполнительные устройства и т. п.
В системах управления летательными аппаратами широкое применение получили исполнительные устройства с механическим выходом, т. е. автоматизированные приводы, у которых в подавляющем большинстве случаев перемещение выходного звена пропорционально (или равно) входной управляющей координате. Автоматизированные приводы с указанными свойствами относятся к классу следящих систем.
В данной курсовой работе стоит цель ознакомления с общими принципами построения систем автоматического управления, с процессами и методами исследования процессов в этих системах, статических и динамических свойств линеаризуемых следящих систем, методы их коррекции и повышение динамической точности. Особое внимание уделено вопросам устойчивости и автоколебаний нелинейной системы.
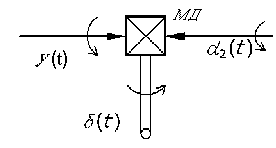
Принципиальная схема следящей системы

Рис.1. Принципиальная схема следящей системы
В схеме приняты следующие обозначения:
МД – механический дифференциал исполняет роль устройства вычитания механических сигналов (угловых перемещений);
П – потенциометр является устройством, на концах которого возникает разность потенциалов, пропорциональная угловому перемещению своей стрелки;
У – электронный усилитель, на выходе которого возникает разность потенциалов, пропорциональная разности потенциалов на входе;
ОВГ – обмотка возбуждения генератора, на вход подается напряжение и на выходе возникает магнитный поток;
Г – генератор, получая магнитный поток с ОВГ, генерирует напряжение пропорциональное потоку;
Д – двигатель, якорь которого соединен с якорем генератора Г, вал которого вращается в зависимости от поданного на якорь напряжения и момента на валу;
ТГ – тахогенератор, вал которого соединен с валом командной оси, генерирует напряжение на якоре, в зависимости от вращения командной оси;
Пл – платформа, управляемый объект.
Исходные данные:
Код схемы Г3333
Двигатель № 3
Генератор № 3
Тахогенератор № 3
ЭМУ № 3
Номинальные данные электрических машин:
Элемент |
№ |
Pн, КВТ |
U ,В |
Iн , А |
Iоу , А |
n об/мин |
GD2, Н*м2 |
Rя, Ом |
Rоу, Ом |
Lоу, Гн |
Двигатель |
3 |
600 |
800 |
750 |
- |
1000 |
2000 |
0,035 |
- |
- |
Генератор |
3 |
700 |
750 |
935 |
45 |
- |
- |
0,035 |
8 |
10 |
Тахогенератор |
3 |
0,014 |
100 |
0,14 |
- |
1200 |
- |
0,2 |
- |
- |
ЭМУ |
3 |
16 |
290 |
55 |
0,08 |
- |
- |
0,2 |
50 |
3 |
Требуемые Показатели Качества
Быстродействие, с |
Динамическая Ошибка, % |
Статическая ошибка, рад |
скоростная ошибка, рад |
1,2 |
30 |
0,125 |
0,025 |
При рассмотрении схем учесть следующее:
Маховой момент двигателя GD2 двигателя приведен с учётом инерции нагрузки.
Выходное сопротивление электронного усилителя
Rвых = 10 Ом.
Момент нагрузки, действующий на платформу равен
Mc = 2000 Н*м
Коэффициенты усиления потенциометра равны: Кд = 1;
Кп = 10 В/град;
Передаточные числа редуктора и платформы равны соответственно
iр = 0,8; iпл = 0,1;
Функциональная схема данной системы.


Рис.2. Функциональная схема данной системы
ЭП1, ЭП2- Эквивалентные преобразователи
У- Усилитель
Г- Генератор
Д- Двигатель
Р- Редуктор
ОС- Обратная связь
Система предназначена для повторения на управляемом объекте (платформе) угла поворота y=y(t). Мощность, которую может потреблять для своего вращения управляемый объект может быть значительной; она обеспечивается установкой двигателя Д соответствующей номинальной мощности. Сравнение углов поворота командной и исполнительной осей осуществляется при помощи датчика рассогласования – механического дифференциала (МД).
Если
углы поворота командной и исполнительной
осей не равны, то возникает рассогласование
![]() .
При этом перемещается движок потенциометра
(ЭП1) и вращается вал тахогенератора
(ЭП2). Напряжение с потенциометра и
тахогенератора поступает на вход
усилителя (У). Далее усиленный сигнал
подводится к обмотке возбуждения
генератора (ОВГ), привод которого не
указан на схеме. Якорь генератора (Г)
соединен с якорем двигателя (Д), обмотка
которого (ОВД) подключена к постоянному
напряжению. В результате при появлении
рассогласования
двигатель начинает вращаться в сторону
уменьшения ошибки до согласования двух
осей. В качестве возмущающего воздействия
рассмотрим момент сопротивления М
.
При этом перемещается движок потенциометра
(ЭП1) и вращается вал тахогенератора
(ЭП2). Напряжение с потенциометра и
тахогенератора поступает на вход
усилителя (У). Далее усиленный сигнал
подводится к обмотке возбуждения
генератора (ОВГ), привод которого не
указан на схеме. Якорь генератора (Г)
соединен с якорем двигателя (Д), обмотка
которого (ОВД) подключена к постоянному
напряжению. В результате при появлении
рассогласования
двигатель начинает вращаться в сторону
уменьшения ошибки до согласования двух
осей. В качестве возмущающего воздействия
рассмотрим момент сопротивления М![]() (t)
на ось управляемого объекта. Для улучшения
динамических качеств следящей системы
в ней предусмотрена отрицательная
обратная связь по углу поворота оси
платформы.
(t)
на ось управляемого объекта. Для улучшения
динамических качеств следящей системы
в ней предусмотрена отрицательная
обратная связь по углу поворота оси
платформы.
Данная система астатическая по отношению к задающему воздействию. Докажем это методом от противного. Пусть система статическая. Значит, в установившемся режиме существует некоторое рассогласование . Тогда система будет отрабатывать его угол, вал двигателя (Д) будет вращаться, а угол поворота платформы не будет изменяться. Мы пришли к противоречию. Следовательно, система астатическая по отношению к задающему воздействию.
Система будет астатической по отношению к возмущению. Докажем это методом от противного.
Предположим, система астатическая по отношению к возмущению. В установившемся режиме отсутствует рассогласование и выходной вал неподвижен. Но на систему действует момент сопротивления, который будет вращать вал, создавая рассогласование. Следовательно, система статическая по отношению к возмущению.
По принципу работы система является комбинированной. Рассогласование появляется и при отклонении и при увеличении нагрузки. Значит, система работает и по от
I. Вывести передаточные функции элементов системы. Определить численные значения постоянных времени и коэффициентов усиления.
Механический дифференциал.
![]()
![]()
![]()
![]()
Рис.3.Механический дифференциал
Потенциометр
Потенциометр можно считать устройством, преобразующим угловое перемещение в пропорциональное напряжение.
![]() ,
где
,
где
![]() – напряжение, генерируемое на выводах
потенциометра;
– напряжение, генерируемое на выводах
потенциометра;
![]() – коэффициент
передачи потенциометра;
– коэффициент
передачи потенциометра;
– входное угловое перемещение.


Рис.4. Потенциометр
Тахогенератор

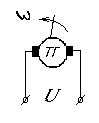
Рис. 5. Тахогенератор
Применив преобразование Лапласа получим
![]()
![]() ,
откуда
,
откуда
![]() находим
из номинальных значений напряжения и
угловой скорости.
находим
из номинальных значений напряжения и
угловой скорости.

Усилитель.
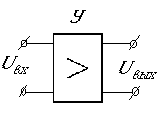
Рис.6. Усилитель

Электронный усилитель принимаем безынерционным звеном с коэффициентом усиления К.
Генератор
Для упрощения задачи сопротивления якоря генератора вынесено во внешнюю цепь. Поэтому на зажимах генератора действует ЭДС, а не напряжение.
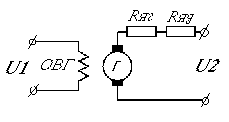
Рис.7. Генератор

Применив преобразование Лапласа, получим
Где
![]() ,
а
,
а
![]()
W![]() (p)=
(p)=![]()
Двигатель.
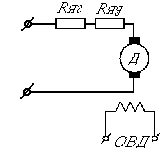
Рис.8. Двигатель
Проведём
линеаризацию, приняв ![]()

где
![]() и
и
![]() ,
при
,
при
![]()
С![]() -
коэффициент
противоЭДС
-
коэффициент
противоЭДС
С![]() -
коэффициент момента
-
коэффициент момента
Подставляя
![]() ,
,
![]() и
и
![]() получим:
получим:
Произведя преобразование Лапласа, получим:

![]() ,
,
![]() ,
,
![]()
Коэффициенты СЕ и СМ найдем из номинальных значений:

![]() ,
номинальный момент находим из номинальной
мощности и оборотов:
,
номинальный момент находим из номинальной
мощности и оборотов:
I -момент инерции, который зависит от приведенного махового момента.
![]() :
I=
:
I=![]()
![]()
![]()
![]() ,
,
![]() ,
,
Момент
инерции двигателя находим из
![]()
![]()
![]()
W![]() =
=![]()
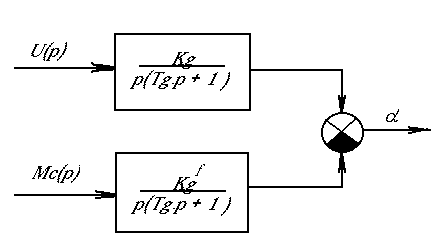
Рис.9. Структурная схема двигателя
Редуктор.
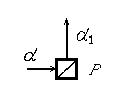
Рис.10. Редуктор
8.Платформа.
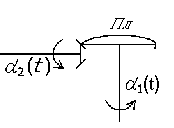

Рис.11. Платформа
II.
Построим структурную схему системы с
указанием передаточных функций звеньев.

Рис.12. Структурная схема системы
Передаточные функции звеньев схемы, изображённой на Рис.12:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
![]() ;
;
![]() ;
;
![]() .
.
Преобразуем структурную схему следующим образом:
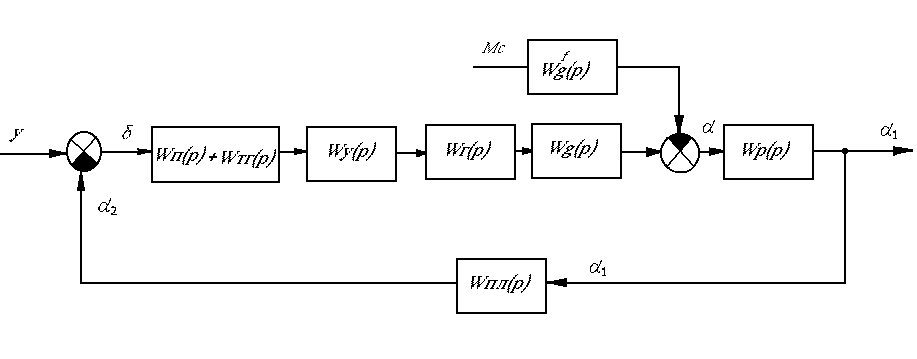
Рис.13. Структурная схема системы
IV. Определим передаточную функцию замкнутой системы 1 по y.
![]()

Определим передаточную функцию для по y и Mc.
По y

по Mc
![]() ,
,
![]() ,
момент нагрузки приложен к платформе,
и идет на двигатель через редуктор
,
момент нагрузки приложен к платформе,
и идет на двигатель через редуктор
![]()
![]()

V. Определим коэффициент усиления электронного усилителя по скоростной и статической ошибкам в установившемся режиме:
Заданы ошибки:
![]()
![]()
-по скоростной ошибке:
![]()
![]() ,
A
= 0,5 об/мин = 0,0523 рад/с
,
A
= 0,5 об/мин = 0,0523 рад/с
при
![]() :
:
![]() ,
,
![]() ,
,
![]() ,
получим:
,
получим:
-по статической ошибке:
![]()
при
![]()
![]() ,
,
,
,
![]() ,
,
получим:
,
,
получим:

Из
полученных коэффициентов берем
максимальный:
![]()
![]()
VII.Построим
D-разбиение
по
![]() и
определим области устойчивости:
и
определим области устойчивости: