

2.5.2. Проводка управления
Проводка управления (рис. 2.9.) может быть гибкой, жесткой либо смешанной.
Гибкая проводка управления выполняется из тонких стальных тросов, диаметр которых выбирается в зависимости от действующей нагрузки и не превышает 8 мм. Так как тросы могут работать только на растяжение, то управление рулями в таком случае выполняется по двухпроводной схеме. Для уменьшения провисания тросов на прямолинейных участках используют текстолитовые направляющие, в местах перегиба троса устанавливают ролики с шариковыми подшипниками.
Применение тросовой проводки и роликов (рис. 2.9., а) позволяет изменять направление проводки управления, делать резкие повороты и прокладывать ее в наиболее удобных и безопасных местах (например, под полом, по борту и т.д.). Положительным качеством тросовой проводки является ее небольшая масса, простота монтажа и замены, а также то, что для размещения тросов требуется мало места.
Недостатком гибкой проводки является большое трение в местах перегиба тросов и вытяжка тросов, возникающая, несмотря на предварительное вытягивание их перед установкой. Кроме того, при большой длине проводки трос пружинит вследствие упругой деформации, в результате чего у пилота создается впечатление, что управление люфтует, т.е. возникает движение ручки управления без поворота рулей и элеронов, что снижает чувствительность управления.
Жесткая проводка (рис. 2.9., б) представляет собой систему жестких тяг и качалок. Качалки служат промежуточными опорами, которые необходимы для деления тяг на сравнительно короткие участки. Чем короче тяга, тем меньше вероятность вибраций. Но чем больше разъемов у тяг, тем больше масса проводки. Тяги работают на растяжение и сжатие. Они имеют трубчатое сечение, изготовляются, как правило, из дюралюминия и реже из стали. Соединения тяг между собой, а также с качалками осуществляется через наконечники с одним или двумя ушками, в которые вмонтированы шарикоподшипники, допускающие перекос между осями тяг. Отдельные наконечники имеют резьбовое соединение для возможной регулировки длины проводки.
Положительными качествами жесткой проводки являются отсутствие вытяжки проводки при эксплуатации, малое трение в сочленениях и надежность в эксплуатации. Однако жесткое управление тяжелее гибкого. Кроме того, при жесткой проводке труднее обходить различные препятствия на пути проводки и обеспечить уплотнения при выводе жестких тяг из герметических кабин.
2.6. Системы управления с усилителями
С увеличением скоростей, размеров и массы самолетов нагрузки на поверхности управления увеличиваются. Однако усилия на рычаги, ограничиваемые физическими возможностями пилота, не должны превышать определенных значений, при больших усилиях на органах управления пилот не может действовать достаточно быстро, что ухудшает маневренность самолета. Утвердилось мнение, что мощная аэродинамическая компенсация и, следовательно, ручное управление, т.е. управление без усилителей, возможны только при скоростях полета, соответствующих числу М не больше 0,9.
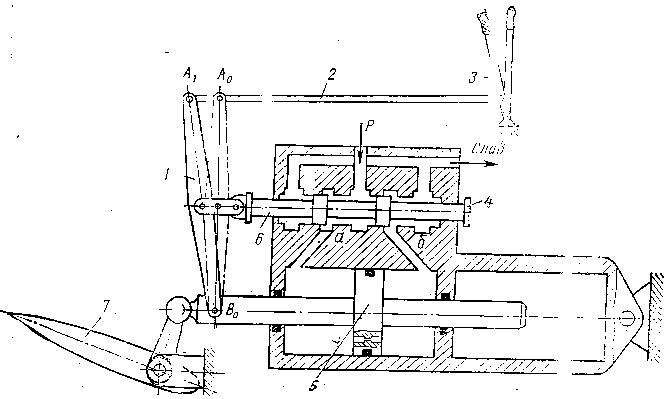
Рис. 2.10. Система управления рулем высоты с гидроусилителем:
1 – рычаг обратной связи; 2 – тяга управления; 3 – ручка управления; 4 – ограничитель хода золотника; 5 – поршень; 6 – управляющий золотник; 7 – руль высоты.
Отказ от использования воздушного потока для уменьшения нагрузок на органы управления пилота потребовал установки на самолете достаточно мощного источника вспомогательной энергии. Таким источником в большинстве случаев является самолетная гидросистема, приспособленная для питания бустеров (гидроусилителей), включенных в систему управления самолетом. Гидропривод в системе управления используется благодаря быстродействию, малой массе, приходящейся на единицу мощности. При наличии гидроусилителей пилот управляет не рулями, а распределительными устройствами гидропривода. Аэродинамический момент при отклонении руля пилотом не ощущается, он полностью передается на конструкцию самолета через гидроусилитель, с появлением которого отпали трудности, связанные с аэродинамической компенсацией рулей. Отработка системы с гидроусилителями почти не требует летных испытаний и производится полностью на наземных стендах, что дает большую экономию времени и средств. Значительно упрощается применение автопилотов, так как при наличии в системе гидроусилителей можно уменьшить мощность рулевых машин автопилота.
Некоторые конструкции гидроусилителей позволяют уменьшить и даже полностью устранить весовую балансировку рулей. Однако гидроусилители утяжеляют конструкцию самолета. Для изучения работы системы управления с гидроусилителями рассмотрим систему управления рулями высоты самолета (рис. 2.10.). Входным элементом, задающим движение, служит ручка управления 3 (или штурвальная колонка), которая находится в пилотской кабине. При движении ручки вперед и назад должны отклоняться рули высоты. Пусть ручка 3 отклоняется на пилота (на рис. 2.10. влево). Это вызовет движение тяги 2 и поворот рычага обратной связи 1 вокруг нижнего шарнира В0. Для этого момента поршень силового цилиндра 5 был заперт жидкостью цилиндрическими поясками управляющего золотника 6. До начала первого этапа движения рычаг обратной связи 1 занимал положение А0В0, а золотник 6 находился в среднем положении и перекрывал проходные сечения окон а и б. Поворот рычага обратной связи 1 против часовой стрелки вокруг точки В0 приведет к смещению золотника 6 влево, тогда в распределителе жидкости появятся две щели, через щель а жидкость под давлением начнет поступать в силовой цилиндр, через щель б жидкость из цилиндра будет вытесняться в полость слива. Под действием возникшего перепада давления в левой и правой полостях силового цилиндра поршень 5 приходит в движение, а его шток отклоняет рулевую поверхность.
Момент начала движения поршня можно условно считать окончанием первого и началом второго этапа работы гидроусилителя на возмущение со стороны входа. На втором этапе после окончания движения ручка управления 3 точку А1 рычага 1 можно считать неподвижной. Поэтому рычаг 1 при движении поршня 5 вправо будет поворачиваться и перемещать золотник 6 в направлении, противоположному тому, которое он занимал при отклонении ручки 3. В результате щели а и б начинают уменьшаться и полностью перекроются, поступление жидкости в силовой цилиндр прекратится, и поршень 5 остановится. При повороте ручки 3 в противоположную сторону движение всех элементов гидроусилителя и руля будет происходить в обратном направлении. В действительности двух отдельных этапов движения следящего привода нет, поскольку оба движения задающего устройства и исполнительного механизма происходят почти одновременно. Механические упоры 4 ограничивают максимальное отклонение золотника и, следовательно, максимальную скорость отклонения руля.
Применяют две разновидности гидроусилителей систем управления рулями: необратимые и обратимые. Необратимыми называют такие усилители, в которых нагрузка, приложенная к выходному звену (например, шарнирный момент руля), преодолевается силовым узлом и на ручке управления не передается. Описанная выше и приведенная на рис.2.10. схема гидроусилителя необратимая. Для создания на ручке «чувства» управления ее нагружают с помощью специальных устройств. Простейшее из них – пружина с линейной зависимостью усилия от отклонения ручки. Однако такие устройства не удовлетворяют пилотов, так как создают на органах управления одинаковые усилия при минимальной и максимальной скоростях полета и легко могут стать причиной опасной, перегрузки самолета при маневре. Распространение получили нагрузочные автоматы, создающие усилие в зависимости от скоростного напора и угла отклонения поверхности управления. Такие нагрузочные автоматы в сочетании с необратимыми усилителями дают возможность выбора наилучших характеристик управляемости для любого самолета. Чтобы освободить пилота от утомительной необходимости держать усилие, при ручном управлении загрузочное устройство снабжается механизмом триммерного эффекта.
Необратимые системы применяется в основном при больших нагрузках на органы управления и в тех случаях, когда нет необходимости создавать на ручке ощущение нагрузки выхода, как, например, в случае управления передним колесом самолета.
На легких самолетах получили распространение обратимые системы управления, в которых обеспечивается передача известной части аэродинамических нагрузок, действующих на рули, на ручку управления. Подобное управление с пропорциональной чувствительностью на ручке уменьшает возможность перегрузки конструкции при различных эволюциях самолета. Нагрузка от шарнирного момента может быть передана на ручку либо при помощи соответствующей рычажной системы обратной связи, либо гидравлическим способом.
Для повышения надежности системы управления, снабженных гидроусилителями, применяют:
разделение рулей на несколько секций, каждая из которых отклоняется отдельным усилителем;
установку на самолете нескольких автономных гидравлических систем, число которых обычно равно числу авиадвигателей;
питание гидроусилителей раздельных секций рулей независимыми гидравлическими системами таким образом, чтобы при отказе одного усилителя для управления самолетом оставалась действующая часть секций рулей, которая обеспечит продолжение полета и посадку. В случае полного отказа гидравлической системы на некоторых самолетах предусмотрен переход на ручное управление, при этом при многосекционных рулевых поверхностях может отклоняться лишь часть поверхностей.
Для того чтобы находящаяся в силовом цилиндре усилителя жидкость не препятствовала ручному управлению, обе полости цилиндра сообщаются между собой через обводной клапан. При наиболее опасных повреждениях, например разъеданиях золотникового распределителя, усилитель должен автоматически отключаться от системы управления для предотвращения ее заклинивания. Стремление повысить экономичность транспортных самолетов приводит к увеличению их размеров и взлетной массы, которая уже сейчас приближается к 450 т. Следует заметить, что моменты, создаваемые поверхностями управления по мере увеличения массы самолетов, становятся все менее эффективными по сравнению с моментами инерции конструкции. Поэтому реакция самолета на отклонение поверхности управления становится неприемлемо малой. В связи с этим можно ожидать в будущем коренных изменений методов управления большими самолетами.
3. Описание лабораторной установки
Лабораторная установка представляет собой органы управления, агрегаты систем управления вертолета МИ-2, планшеты и плакаты, представленные в лаборатории.
4. Порядок выполнения работы
Ознакомиться с органами управления и различными агрегатами систем управления летательных аппаратов на примере соответствующих устройств вертолета МИ-2, представленных в лаборатории. Изучить схемы систем управления и конструкцию отдельных агрегатов, представленные на плакатах.
5. Требования к отчету
Отчет должен содержать: схему самолета с основными рулями управления; формулы аэродинамических сил; основные элементы механизации крыла; схему работы триммера; схемы тросовой и рычажной проводок управления.
6. Контрольные вопросы
1. Назовите основные рули самолета.
2. Как осуществляется управление углами тангажа, крена и рыскания (курса)?
3. Назовите основные элементы механизации крыла и их назначение.
4. Как влияют элементы механизации крыла на прирост коэффициента подъемной силы?
5. Как определяется шарнирный момент руля при работе триммера?
6. Расскажите о работе сервокомпенсатора.
7. Как осуществляется аэродинамическая компенсация и весовая балансировка рулей в полете?
8. Перечислите типы проводок управления, их преимущества и недостатки.
9. Опишите работу бустерной системы управления.
Список литературы
Никитин Г.А., Баканов Е.А. Основы авиации: Учебник для вузов гражданской авиации. – М.: Транспорт, 1984 г. – 261 с.
Житомирский Г.И. Конструкция самолетов: Учебник для авиационных специальностей вузов. – М.: Машиностроение, 1991. – 394 с.