

2.4. Аэродинамическая компенсация и весовая балансировка рулей
2.4.1. Триммеры
Триммеры (рис. 2.4.) представляют собой вспомогательную рулевую поверхность, устанавливаемую в хвостовой части основного руля.
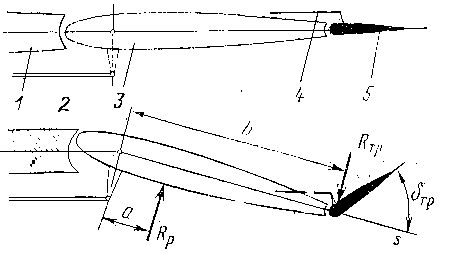
Рис. 2.4. Схема работы триммера:
1 – неподвижная поверхность; 2 и 4 – тяги; 3 – руль; 5 – триммер.
С помощью триммеров самолет балансируется относительно всех его осей при изменении центровки и режима полета. Триммер отклоняется независимо от руля обычно с помощью необратимых самотормозящихся электромеханизмов. Триммер руля высоты, как правило, управляется тросовым механическим устройством. Сущность работы триммера можно пояснить следующим примером. При отказе одного из двигателей самолета возникает разворачивающий момент, противодействие которому может быть создано отклонением руля поворота. Длительный полет с отклоненным рулем утомителен для пилота. Отклоняя триммер в сторону, противоположную отклонению руля, нагрузку, передающуюся на ноги пилота, можно уменьшить до сколь угодно малой величины. Компенсирующий момент от триммера, противодействующий шарнирному моменту, возникает вследствие большого плеча силы, приложенной к триммеру, хотя сама сила и невелика. Шарнирный момент при этом
Мш = Rр a – Rтр b, (2.5)
где Rр и Rтр – аэродинамические силы, приложенные, соответственно к рулю и триммеру; а и b-плечи этих сил относительно оси вращения.
При наличии отклоняемых стабилизатора и киля надобность в установке триммера отпадает.
2.4.2. Аэродинамическая компенсация
Уменьшение шарнирного момента руля, приводящее к снижению усилия на рычаге управления, осуществляется с помощью аэродинамической компенсации. Аэродинамическая компенсация (рис. 2.5.) осуществляется с помощью: осевой и роговой компенсации рулей; внутренней или статической компенсации рулей; сервокомпенсатора, кинематически связанного с отклонением руля; пружинного сервокомпенсатора.
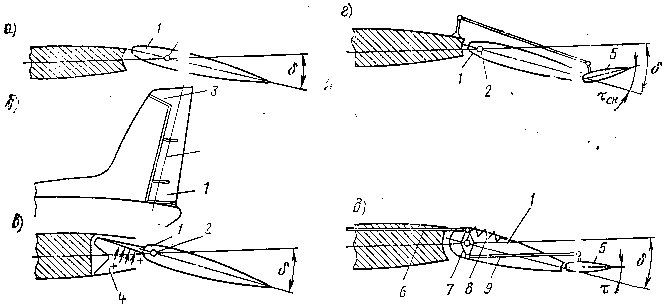
Рис. 2.5. Виды аэродинамической компенсации шарнирного момента:
а – осевая; б – роговая; в – внутренняя; г – сервокомпенсатор; д – пружинный сервокомпенсатор; 1 – руль; 2 – ось вращения руля; 3 – роговой компенсатор; 4 – гибкая диафрагма; 5 – компенсатор; 6 – тяга управления рулем; 7 – качалка; 8 – пружина; 9 – тяга.
Сущность осевой компенсации заключается в том, что ось вращения находится на некотором удалении от носка руля (ближе к центру давления). В результате уменьшения расстояния точки приложения аэродинамической силы R от оси вращения шарнирный момент уменьшается. Дальнейшее перемещение оси вращения в направлении от носка может привести к перемене знака шарнирного момента. Это явление носит название перекомпенсации. Обычно
Sк.в = (0,22…0,25) Sр.в ;
Sкн = (0,20…0,22) Sр.н ; (2.6)
Sкэ = (0,25…0,28) Sэ ,
где Sр.в, Sр.н, Sэ – соответственно площади рулей высоты, направления и элерона; Sк.в, Sкн, Sкэ – площади компенсационной части указанных рулей.
У рулей, снабженных роговой компенсацией, концевая часть рулевой поверхности располагается перед осью руля. При повороте руля действующая на роговой компенсатор аэродинамическая сила создает момент, противоположный шарнирному.
Внутренняя или статическая компенсация рулей чаще всего применяется на элеронах. Носок элерона соединяется с крылом воздухонепроницаемой гибкой диафрагмой. При отклонении элерона избыточное давление на диафрагму создает силу, способствующую его отклонению. Для компенсации такого типа характерно отсутствие перетекания воздуха из зоны повышенного давления в зону пониженного, а также устранение выхода носка руля при его отклонении за крыло, что снижает его лобовое сопротивление. Внутренняя компенсация особенно эффективна при полетах на больших скоростях, однако осуществление ее в тонких профилях затруднено, т.к. она ограничивает углы отклонения элерона.
По принципу действия сервокомпенсатор и триммер подобны, но есть между ними и существенное различие. Если триммер отклоняется только по воле пилота и отклонение руля не вызывает поворота триммера, то сервокомпенсатор с помощью четырехзвенного механизма отклоняется всегда в сторону, обратную отклонению основного руля, угол отклонения компенсатора увеличивается при увеличении отклонение руля.
Рассмотрим работу пружинного сервокомпенсатора. Качалка управления соединяется с рулем через пружинную тягу с предварительно затянутыми пружинами (на схеме для простоты эта тяга показана в виде одной пружины). Второй конец качалки жесткой тягой соединен с компенсатором. Если снять пружинную тягу, то при повороте качалки управления руль останется неподвижным, а компенсатор отклонится. Если аэродинамические силы, действующие на руль, малы и усилия, потребные для отклонения руля, не превышают усилий предварительной затяжки пружин в пружинной тяге, то последнюю можно рассматривать как жесткий стержень неизменной длины. Поворот руля в этом случае не вызывает отклонения компенсатора. Вследствие малого значения шарнирного момента аэродинамическая компенсация не требуется. Но как только аэродинамические силы, действующие на руль, возрастут, например вследствие увеличения угла отклонения руля или повышения скорости полета, и для отклонения руля потребуются усилия, превышающие усилия от предварительной затяжки пружин в пружинной тяге, то при отклонении руля пружинная тяга будет удлиняться или укорачиваться. В результате качалка повернется относительно руля, и компенсатор отклонится в сторону, противоположную отклонению руля. Угол отклонения компенсатора пропорционален усилию, потребному для отклонения руля.
Таким образом, автоматически включившийся (отключившийся) сервокомпенсатор снижает усилия, потребные для отклонения руля, до вполне допустимых значений. Пружинный сервокомпенсатор применяется на рулях направления многодвигательных самолетов.
Расчеты показывают, что у сверхзвуковых самолетов велики усилия на рычаги управления. Широкий диапазон изменения этих усилий от малых на до звуковых скоростях до очень больших на сверхзвуковых скоростях требует ввода аэродинамической компенсации, переменной по числу М. Рассмотренные здесь виды компенсации не позволяют получить приемлемых (по значению и знаку) усилий на рычагах управления на всех скоростях полета. Выходом из положения явилось применение системы управления с усилителями (бустерами). Однако и при наличии усилителей в системе управления рули должны иметь аэродинамическую компенсацию, во-первых, для снижения потребных мощностей бустеров, во-вторых, для повышения безопасности аварийного перехода на ручное управление при выходе бустера из строя.