

1![]()
![]()
 .
Статика.Аксиомы статики. Связи, реакции
связей. Сходящие силы. Параллельные
силы. Центр тяжести твёрдого тела.Статикой
называется раздел механики, в котором
излагается общее учение о силах и
изучаются условия равновесия материальных
тел, находящихся под действием сил. Под
равновесием будем понимать состояние
покоя тела по отношению к другим
телам.Состояние
равновесия или движения данного тела
зависит от характера
его механических Взаимодействий с
другими телами, т.
е. от
тех давлений, притяжений или отталкиваний,
которые тело испытывает в результате
этих взаимодействий. Величина, являющаяся
основной мерой механического взаимодействия
материальных тел,
называется
в механике силой.
Аксиомы
статики:
1.
Если
на свободное абсолютно твердое тело
действуют две силы,
то
тело может находиться в равновесии
тогда и только тогда, когда эти силы
равны по модулю (F1=F2)
и направлены вдоль одной прямой в
противоположные стороны
(рис. 2). 2.
Действие
данной системы сил на абсолютно твердое
тело не изменяется, если к ней прибавить
или от нее отнять уравновешенную систему
сил.Следствие:
действие
силы на абсолютно твердое тело не
изменится, если перенести точку приложения
силы вдоль ее линии действия в любую
другую точку тела.
3.Закон
параллелограмма сил:
две
силы, приложенные к телу в одной точке,
имеют равнодействующую, приложенную в
той же точке и изображаемую диагональю
параллелограмма, построенного на этих
силах, как на сторонах.
4. Закон
равенства действия
и противодействия:
при
всяком действии одного материального
тела на другое имеет место такое же
численно, но противоположное по
направлению противодействие. F'=—F
(рис. 7). 5.Свойство
внутренних сил:при
взаимодействии две любые части тела
(или конструкции) действуют друг на
друга с равными по модулю и противоположно
направленными силами. 6.
принцип отвердевания:равновесие
изменяемого (деформируемого) тела,
находящегося под действием данной
системы сил, не нарушится, если тело
считать отвердевшим (абсолютно твердым).
По определению, тело, которое может
совершать из данного положения любые
перемещения в пространство, называется
свободным, (например, воздушный шар в
воздухе). Тело, перемещениям которого
в пространстве препятствуют какие-нибудь
другие, скрепленные или соприкасающиеся
с ним, тела, называется несвободным. Все
то, что
ограничивает перемещения данного тела
в пространстве, называют связью.
Тело, стремясь под действием приложенных
сил осуществить перемещение, которому
препятствует связь, будет действовать
на нее с некоторой силой, называемой
силой
давления на связь.
Одновременно по закону о равенстве
действия и противодействия связь будет
действовать на тело с такой же по модулю,
но противоположно направленной силой.
Сила,
с которой данная связь действует на
тело, препятствуя тем или иным его
перемещениям, называется силой реакции
(противодействия)
связи
или просто реакцией
связи. Систе́ма
сходя́щихся сил —
это такая система сил, действующих на
абсолютно
твёрдое тело,
в которой линии действия всех сил
пересекаются в одной точке. II-ые силы:
2-е силы линии действия которых паралельны
между собой и имеют одно и тоже направление
называются собственно паралельными.
2-е силы = по величине,но противоположны
по направлению вдоль отрезка, то эти
силы =0. Центр тяжести- такая точка в
тв.теле к которому приложено равнодействующая
всех элементов сил(собственно II). Центром
тяжести тела называется точка,
относительно которой суммарный момент
сил тяжести, действующих на систему,
равен нулю. Момент
силы— векторная физическая величина,
равная произведению радиус-вектора,
проведенного от оси вращения к точке
приложения силы, на вектор этой силы.
Характеризует вращательное действие
силы на твёрдое тело. На отдельные
частицы твердого тела действуют силы
тяжести G1, G2, G3......, Gn. Эти параллельные
силы можно сложить и получить
результирующую, величина которой равна
весу тела. Если подвесить тело за
какую-либо точку, то оно будет вращаться
под действием вращающего момента силы
тяжести до тех пор, пока направление
действия силы тяжести не пройдет через
точку подвеса. Если тело подвесить за
какую-либо другую точку, то получится
другое направление действия силы тяжести
(относительно тела). Оба направления
пересекаются в одной точке, называемой
центром тяжести тела. Если заменить
силы тяжести отдельных частиц тела
результирующей силой тяжести – весом
тела, то центром тяжести будет такая
точка тела, через которую при любом
положении тела будет проходить направление
силы тяжести. По отношению к центру
тяжести вращательные моменты сил тяжести
уравновешены. Можно считать, что в центре
тяжести сконцентрирован общий вес тела.
Система сил
F1, F2, ..., Fn,
лежащих в одной плоскости, линии действия
которых параллельны друг другу, называется
плоской системой параллельных
сил. При
приведении этой системы сил к произвольному
центру (точке) О получим главный вектор
R, приложенный в точке О, и пару сил с
моментом Mo. Главный вектор R системы
параллельных сил параллелен силам, его
модуль равен абсолютномузначению
алгебраической суммы проекций сил на
ось (О1у), параллельную силам, а его
направление определяется знаком этой
суммы:…. Связи
На тело влияют
внешние силы, а так же другие материальные
тела, ограничивающие перемещение данного
тела в пространстве. Такие тела называют
связями. Сила, с которой связь действует
на тело, ограничивая его перемещение,
называется реакцией
связи. Для
записи условия равновесия системы связи
убирают, а реакции связей заменяют на
равные им силы. Например, если тело
закреплено на шарнире, то шарнир является
связью. Реакцией связи при этом будет
сила, проходящая через ось шарнира.
.
Статика.Аксиомы статики. Связи, реакции
связей. Сходящие силы. Параллельные
силы. Центр тяжести твёрдого тела.Статикой
называется раздел механики, в котором
излагается общее учение о силах и
изучаются условия равновесия материальных
тел, находящихся под действием сил. Под
равновесием будем понимать состояние
покоя тела по отношению к другим
телам.Состояние
равновесия или движения данного тела
зависит от характера
его механических Взаимодействий с
другими телами, т.
е. от
тех давлений, притяжений или отталкиваний,
которые тело испытывает в результате
этих взаимодействий. Величина, являющаяся
основной мерой механического взаимодействия
материальных тел,
называется
в механике силой.
Аксиомы
статики:
1.
Если
на свободное абсолютно твердое тело
действуют две силы,
то
тело может находиться в равновесии
тогда и только тогда, когда эти силы
равны по модулю (F1=F2)
и направлены вдоль одной прямой в
противоположные стороны
(рис. 2). 2.
Действие
данной системы сил на абсолютно твердое
тело не изменяется, если к ней прибавить
или от нее отнять уравновешенную систему
сил.Следствие:
действие
силы на абсолютно твердое тело не
изменится, если перенести точку приложения
силы вдоль ее линии действия в любую
другую точку тела.
3.Закон
параллелограмма сил:
две
силы, приложенные к телу в одной точке,
имеют равнодействующую, приложенную в
той же точке и изображаемую диагональю
параллелограмма, построенного на этих
силах, как на сторонах.
4. Закон
равенства действия
и противодействия:
при
всяком действии одного материального
тела на другое имеет место такое же
численно, но противоположное по
направлению противодействие. F'=—F
(рис. 7). 5.Свойство
внутренних сил:при
взаимодействии две любые части тела
(или конструкции) действуют друг на
друга с равными по модулю и противоположно
направленными силами. 6.
принцип отвердевания:равновесие
изменяемого (деформируемого) тела,
находящегося под действием данной
системы сил, не нарушится, если тело
считать отвердевшим (абсолютно твердым).
По определению, тело, которое может
совершать из данного положения любые
перемещения в пространство, называется
свободным, (например, воздушный шар в
воздухе). Тело, перемещениям которого
в пространстве препятствуют какие-нибудь
другие, скрепленные или соприкасающиеся
с ним, тела, называется несвободным. Все
то, что
ограничивает перемещения данного тела
в пространстве, называют связью.
Тело, стремясь под действием приложенных
сил осуществить перемещение, которому
препятствует связь, будет действовать
на нее с некоторой силой, называемой
силой
давления на связь.
Одновременно по закону о равенстве
действия и противодействия связь будет
действовать на тело с такой же по модулю,
но противоположно направленной силой.
Сила,
с которой данная связь действует на
тело, препятствуя тем или иным его
перемещениям, называется силой реакции
(противодействия)
связи
или просто реакцией
связи. Систе́ма
сходя́щихся сил —
это такая система сил, действующих на
абсолютно
твёрдое тело,
в которой линии действия всех сил
пересекаются в одной точке. II-ые силы:
2-е силы линии действия которых паралельны
между собой и имеют одно и тоже направление
называются собственно паралельными.
2-е силы = по величине,но противоположны
по направлению вдоль отрезка, то эти
силы =0. Центр тяжести- такая точка в
тв.теле к которому приложено равнодействующая
всех элементов сил(собственно II). Центром
тяжести тела называется точка,
относительно которой суммарный момент
сил тяжести, действующих на систему,
равен нулю. Момент
силы— векторная физическая величина,
равная произведению радиус-вектора,
проведенного от оси вращения к точке
приложения силы, на вектор этой силы.
Характеризует вращательное действие
силы на твёрдое тело. На отдельные
частицы твердого тела действуют силы
тяжести G1, G2, G3......, Gn. Эти параллельные
силы можно сложить и получить
результирующую, величина которой равна
весу тела. Если подвесить тело за
какую-либо точку, то оно будет вращаться
под действием вращающего момента силы
тяжести до тех пор, пока направление
действия силы тяжести не пройдет через
точку подвеса. Если тело подвесить за
какую-либо другую точку, то получится
другое направление действия силы тяжести
(относительно тела). Оба направления
пересекаются в одной точке, называемой
центром тяжести тела. Если заменить
силы тяжести отдельных частиц тела
результирующей силой тяжести – весом
тела, то центром тяжести будет такая
точка тела, через которую при любом
положении тела будет проходить направление
силы тяжести. По отношению к центру
тяжести вращательные моменты сил тяжести
уравновешены. Можно считать, что в центре
тяжести сконцентрирован общий вес тела.
Система сил
F1, F2, ..., Fn,
лежащих в одной плоскости, линии действия
которых параллельны друг другу, называется
плоской системой параллельных
сил. При
приведении этой системы сил к произвольному
центру (точке) О получим главный вектор
R, приложенный в точке О, и пару сил с
моментом Mo. Главный вектор R системы
параллельных сил параллелен силам, его
модуль равен абсолютномузначению
алгебраической суммы проекций сил на
ось (О1у), параллельную силам, а его
направление определяется знаком этой
суммы:…. Связи
На тело влияют
внешние силы, а так же другие материальные
тела, ограничивающие перемещение данного
тела в пространстве. Такие тела называют
связями. Сила, с которой связь действует
на тело, ограничивая его перемещение,
называется реакцией
связи. Для
записи условия равновесия системы связи
убирают, а реакции связей заменяют на
равные им силы. Например, если тело
закреплено на шарнире, то шарнир является
связью. Реакцией связи при этом будет
сила, проходящая через ось шарнира.
2. Система пар сил. Плоская система сил. Главный вектор и главный момент. Произвольная система сил. Условия равновесия.
 ля
равновесия системы сходящихся сил,
приложенных к твердому телу, необходимо
и достаточно, чтобы равнодействующая,
а следовательно, и главный вектор этих
сил были равны нулю. Условия, которым
при этом должны удовлетворять сами
силы, можно выразить в геометрической
или в аналитической форме. Геометрическое
условие равновесия. Так
как главный вектор R
системы сил определяется как замыкающая
сторона силового многоугольника,
построенного из этих сил то R
может обратиться в нуль только тогда,
когда конец последней силы в многоугольнике
совпадает с началом первой силы, т. е.
когда многоугольник замкнется.
Следовательно,
для
равновесия системы сходящихся сил
необходимо и достаточно, чтобы силовой
многоугольник, построенный из этих сил,
был замкнутым. Аналитические
условия равновесия.
Аналитически модуль главного вектора
системы сил определяется формулой
ля
равновесия системы сходящихся сил,
приложенных к твердому телу, необходимо
и достаточно, чтобы равнодействующая,
а следовательно, и главный вектор этих
сил были равны нулю. Условия, которым
при этом должны удовлетворять сами
силы, можно выразить в геометрической
или в аналитической форме. Геометрическое
условие равновесия. Так
как главный вектор R
системы сил определяется как замыкающая
сторона силового многоугольника,
построенного из этих сил то R
может обратиться в нуль только тогда,
когда конец последней силы в многоугольнике
совпадает с началом первой силы, т. е.
когда многоугольник замкнется.
Следовательно,
для
равновесия системы сходящихся сил
необходимо и достаточно, чтобы силовой
многоугольник, построенный из этих сил,
был замкнутым. Аналитические
условия равновесия.
Аналитически модуль главного вектора
системы сил определяется формулой
![]()
 авенства
(11) выражают условия равновесия в
аналитической форме: для
равновесия пространственной системы
сходящихся сил необходимо и достаточно,
чтобы, суммы проекций этих сил на каждую
из трех координатных осей были равны
нулю. Если
все действующие на тело сходящиеся силы
лежат в одной плоскости, то они образуют
плоскую
систему сходящихся сил.
В случае плоской системы
сходящихся сил получим, очевидно, только
два условия равновесия: Теорема
о трех силах.
При решении задач статики иногда удобно
пользоваться следующей теоремой: если
твердое тело находится в равновесии
под действием трех непараллельных сил,
лежащих в одной плоскости, то линии
действия этих сил пересекаются в одной
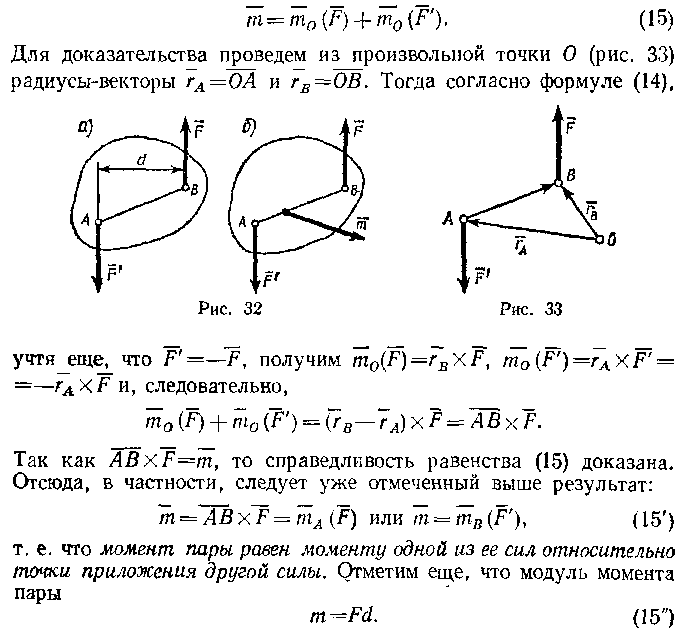
точке. Парой
сил
называется
система двух равных по модулю, параллельных
и направленных в
противоположные
стороны сил, действующих на абсолютно
твердое тело
(рис. 32, а).
Система сил F,
F',
образующих пару, очевидно, не находится
в равновесии (эти силы не направлены
вдоль одной прямой). В то же время пара
сил не имеет равнодействующей, поскольку,
как будет доказано, равнодействующая
любой системы сил равна ее главному
вектору т. е. сумме этих сил, а для пары
R=F+F'
=0.
Поэтому свойства пары сил, как особой
меры механического взаимодействия тел,
должны быть рассмотрены отдельно.
Плоскость, проходящая через линии
действия пары сил, называется плоскостью
действия пары.
Расстояние d
между линиями действия сил пары называется
плечом
пары.
Действие пары сил на твердое тело
сводится к некоторому вращательному
эффекту, который характеризуется
величиной, называемой моментом
пары.
Этот момент определяется: 1) его модулем,
равным произведению Fd
2)
положением в пространстве плоскости
действия пары; 3) направлением поворота
пары в этой плоскости. Таким образом,
как и момент силы относительно центра,
это величина векторная. моментом
пары сил называется вектор т
(или М),
модуль которого равен произведению
модуля одной из сил пары на ее плечо и
который направлен перпендикулярно
плоскости действия пары в ту сторону,
откуда пара видна стремящейся повернуть
тело против хода часовой стрелки
(рис. 32, б).
момент
пары равен сумме
авенства
(11) выражают условия равновесия в
аналитической форме: для
равновесия пространственной системы
сходящихся сил необходимо и достаточно,
чтобы, суммы проекций этих сил на каждую
из трех координатных осей были равны
нулю. Если
все действующие на тело сходящиеся силы
лежат в одной плоскости, то они образуют
плоскую
систему сходящихся сил.
В случае плоской системы
сходящихся сил получим, очевидно, только
два условия равновесия: Теорема
о трех силах.
При решении задач статики иногда удобно
пользоваться следующей теоремой: если
твердое тело находится в равновесии
под действием трех непараллельных сил,
лежащих в одной плоскости, то линии
действия этих сил пересекаются в одной
точке. Парой
сил
называется
система двух равных по модулю, параллельных
и направленных в
противоположные
стороны сил, действующих на абсолютно
твердое тело
(рис. 32, а).
Система сил F,
F',
образующих пару, очевидно, не находится
в равновесии (эти силы не направлены
вдоль одной прямой). В то же время пара
сил не имеет равнодействующей, поскольку,
как будет доказано, равнодействующая
любой системы сил равна ее главному
вектору т. е. сумме этих сил, а для пары
R=F+F'
=0.
Поэтому свойства пары сил, как особой
меры механического взаимодействия тел,
должны быть рассмотрены отдельно.
Плоскость, проходящая через линии
действия пары сил, называется плоскостью
действия пары.
Расстояние d
между линиями действия сил пары называется
плечом
пары.
Действие пары сил на твердое тело
сводится к некоторому вращательному
эффекту, который характеризуется
величиной, называемой моментом
пары.
Этот момент определяется: 1) его модулем,
равным произведению Fd
2)
положением в пространстве плоскости
действия пары; 3) направлением поворота
пары в этой плоскости. Таким образом,
как и момент силы относительно центра,
это величина векторная. моментом
пары сил называется вектор т
(или М),
модуль которого равен произведению
модуля одной из сил пары на ее плечо и
который направлен перпендикулярно
плоскости действия пары в ту сторону,
откуда пара видна стремящейся повернуть
тело против хода часовой стрелки
(рис. 32, б).
момент
пары равен сумме
К![]() ак
известно, величина R,
равная геометрической сумме всех сил,
называется главным
вектором системы сил
величина М0,
равная геометрической сумме моментов
всех сил относительно центра О, называется
главным
моментом системы сил
относительно этого центра. Для
равновесия любой системы сил необходимо
и достаточно,
чтобы главный вектор этой системы сил
и ее главный момент относительно любого
центра были равны нулю,
т. е. чтобы выполнялись условия
ак
известно, величина R,
равная геометрической сумме всех сил,
называется главным
вектором системы сил
величина М0,
равная геометрической сумме моментов
всех сил относительно центра О, называется
главным
моментом системы сил
относительно этого центра. Для
равновесия любой системы сил необходимо
и достаточно,
чтобы главный вектор этой системы сил
и ее главный момент относительно любого
центра были равны нулю,
т. е. чтобы выполнялись условия
Условия являются необходимыми, так как если какое-нибудь из них не выполняется, то система действующих на тело сил приводится или к равнодействующей, или к паре сил и, следовательно, не является уравновешенной. Одновременно условия (23) являются и достаточными, потому что при R = 0 система сил может приводиться только к паре с моментом М0, а так как Мо=0, то имеет место равновесие. Плоская система сил -система сил, как угодно расположенная в одной плоскости.
Главный вектор
– векторная сумма всех сил, приложенных
к телу. Главный момент относительно
центра –векторная сумма моментов всех
сил, приложенных к телу относительно
того же центра.
Парой сил
называются две силы, равные по величине,
параллельные и направленные в
противоположные стороны
![]() ,
,
![]() и
и
![]() .
Несмотря на то, что сумма сил равна нулю,
эти силы не уравновешиваются. Под
действием этих сил, пары сил, тело начнёт
вращаться. И вращательный эффект будет
определяться моментом пары:
.
Несмотря на то, что сумма сил равна нулю,
эти силы не уравновешиваются. Под
действием этих сил, пары сил, тело начнёт
вращаться. И вращательный эффект будет
определяться моментом пары:
![]() ,
.
Расстояние a между линиями действия сил
называется плечом пары. Плоская
система сил
– система сил, расположенных в одной
плоскости. Система сил приводится к
одной силе – главному вектору и к паре
сил, момент которой равен главному
моменту. Момент пары сил направлен
перпендикулярно к плоскости, в которой
лежат силы
,
.
Расстояние a между линиями действия сил
называется плечом пары. Плоская
система сил
– система сил, расположенных в одной
плоскости. Система сил приводится к
одной силе – главному вектору и к паре
сил, момент которой равен главному
моменту. Момент пары сил направлен
перпендикулярно к плоскости, в которой
лежат силы