

6. Изучение магнитного поля Земли (задача № 2)
В задаче №1 приведена расчетная формула для вычисления индукции магнитного поля.
![]()
где
I
– сила тока;
r
– сопротивление
на магазине;
Т
– период вращения индуктора, d2
– площадь
поперечного сечения индуктора, выраженная
через сторону квадрата; N
–число
витков катушки индуктора. Она была
получена в предположении, что ось
вращения индуктора 0102
(рис.8) ориентирована перпендикулярно
вертикальной
![]() или горизонтальной
или горизонтальной
![]() составляющих вектора
индукции магнитного поля Земли и лежит
в плоскости магнитного меридиана.
составляющих вектора
индукции магнитного поля Земли и лежит
в плоскости магнитного меридиана.
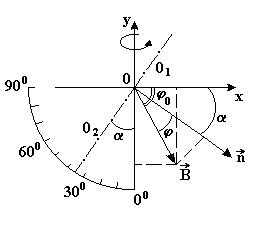 Рассмотрим
теперь случай, когда ось вращения 0102,
оставаясь в плоскости магнитного
меридиана, составляет некоторый угол
с направлением вектора
.
Его можно свести к предыдущей ситуации,
если заменить в расчетной формуле модуль
вектора В
на его проекцию В
на направление нормали
Рассмотрим
теперь случай, когда ось вращения 0102,
оставаясь в плоскости магнитного
меридиана, составляет некоторый угол
с направлением вектора
.
Его можно свести к предыдущей ситуации,
если заменить в расчетной формуле модуль
вектора В
на его проекцию В
на направление нормали
![]() к оси индуктора (см. рис. 8). Это означает,
что можно определить величину В
при различных ориентациях оси вращения
индуктора.
к оси индуктора (см. рис. 8). Это означает,
что можно определить величину В
при различных ориентациях оси вращения
индуктора.
Рис.
8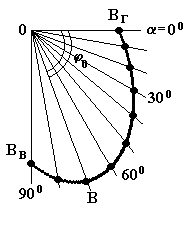
Будем определять положение оси 0102 посредством угла , образованного ею с вертикалью у (см. рис. 8). Тогда при = 0
![]() ,
а при
,
а при
![]()
![]()
Если
нормаль
совпадает с направлением вектора
![]() ,
то В
= В.
,
то В
= В.
Рис.9
Для снятия зависимости В() на боковых стойках индуктора нанесена шкала от 00 до 900. Указателем служит центр стопорной гайки.
При работе на установках, где сопротивление RГ и RВ устанавливаются с помощью магазина сопротивлений, рекомендуется заполнение следующей таблицы.
Таблица3
№ п/п |
, 0 |
I, мкА |
R, Ом |
Число оборотов индуктора |
Показания секундомера, с |
Период вращения индуктора, с |
В, Тл |
1 |
0 |
70 |
100 |
30 |
|
|
|
2 |
20 |
70 |
150 |
30 |
|
|
|
3 |
40 |
70 |
200 |
30 |
|
|
|
4 |
60 |
70 |
250 |
30 |
|
|
|
5 |
65 |
70 |
300 |
30 |
|
|
|
6 |
70 |
70 |
300 |
30 |
|
|
|
7 |
75 |
70 |
300 |
30 |
|
|
|
8 |
80 |
70 |
300 |
30 |
|
|
|
9 |
85 |
70 |
300 |
30 |
|
|
|
10 |
90 |
70 |
300 |
30 |
|
|
|
11 |
90 |
70 |
300 |
30 |
|
|
|
12 |
90 |
70 |
300 |
30 |
|
|
|
13 |
90 |
70 |
300 |
30 |
|
|
|
14 |
90 |
70 |
300 |
30 |
|
|
|
На установках, где сопротивления RГ и RВ фиксированы и указаны на панели установки, рекомендуется заполнение следующей таблицы.
Таблица 4
№ п/п |
, 0 |
I, мкА |
R, Ом |
Число оборотов индуктора |
Показания секундомера, с |
Период вращения индуктора, с |
В, Тл |
1 |
0 |
40 |
RГ |
30 |
|
|
|
2 |
20 |
40 |
RВ |
30 |
|
|
|
3 |
40 |
60 |
RВ |
30 |
|
|
|
4 |
60 |
80 |
RВ |
30 |
|
|
|
5 |
65 |
90 |
RВ |
30 |
|
|
|
6 |
70 |
90 |
RВ |
30 |
|
|
|
7 |
75 |
90 |
RВ |
30 |
|
|
|
8 |
80 |
90 |
RВ |
30 |
|
|
|
9 |
85 |
90 |
RВ |
30 |
|
|
|
10 |
90 |
90 |
RВ |
30 |
|
|
|
11 |
90 |
90 |
RВ |
30 |
|
|
|
12 |
90 |
90 |
RВ |
30 |
|
|
|
13 |
90 |
90 |
RВ |
30 |
|
|
|
14 |
90 |
90 |
RВ |
30 |
|
|
|
После заполнения любой из таблиц строится график - зависимость В, из которого определяются значения В и 0. По пяти значениям В при = 900 (т.е. значениям вертикальной составляющей ВВ) рассчитывается доверительная граница случайной погрешности в определении величины магнитной индукции по формулам, приведенным в методических указаниях к данной работе. Расчет доверительной границы неисключенной систематической погрешности и границы полной погрешности измерения В приведен там же.
Погрешность в определении магнитного наклонения 0 принять равной цене наименьшего деления градусной шкалы.
Окончательный результат для значения В и 0 записывается в стандартном виде, представленном в методических указаниях к работе.