

3.4. Розрахунок напірного механізму екскаватора
3.4.1 Напірний механізм служить для надання рукояті зворотно-поступального руху при зануренню ковша в породу . Механізм складається із напірної лебідки і канатів. Кінематична схема напірного механізму наведена на рис.
Для визначення середньозваженої потужності механізму напору (рис. 13) враховують наступні положення рукояті з ковшем:
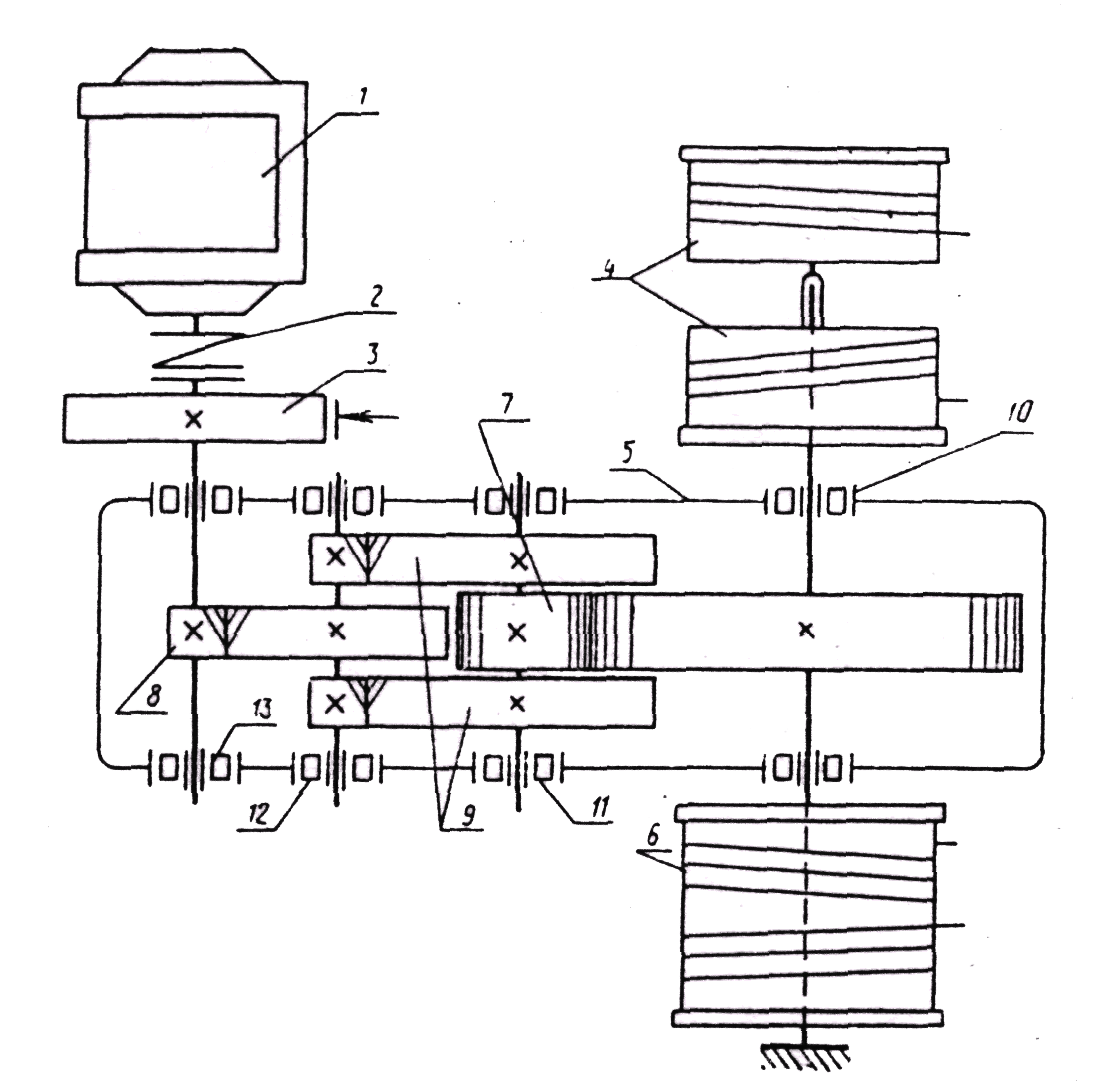
Рис. 13. Кінематична схема напірного механізму екскаватора ЕКГ – 8І
1 – електродвигун; 2 – муфта; 3 – гальмо, 4 – барабан; 5 – редуктор;
6 – барабан нероз’ємний; 8, 9 – шестерні, 10, 11, 12 і 13 – підшипники
3.3.2. Положення: поворот екскаватора з наповненим ковшем до розвантаження з повним вильотом стріли і завантажені ковша
Зусилля напору (рис. 12):
|
SнІV = SпІVcosβ + Gрsinγ + Gк.в.sinγ, МН (43) |
Швидкість напору при ІV положенні ковша (до розвантаження):
VнІV = 0,3 VнІІ, м/с (44) |
3.3.3. Рукоять з ковшем розташована перпендикулярно до горизонталі (лінія стояння)
Положення V. Рукоять з ковшем розташована перпендикулярно до горизонталі. В цьому випадку напірне зусилля визначається як:
|
SнV ≥ Gк.п + Gр, МН (45) |
Швидкість напору при цьому положенні номінальна:
|
VнV = VнІІ, м/с. (46) |
Середньозважена потужність напірного механізму розраховується за формулою:
|
Nн(св) = (SнІІ·VнІІ·tк + SнІV·VнІV·tр + SнV·VнV·t3)/tцм (47) |
де – коефіцієнт запасу потужності, приймається 0,9.
3.3.4. Побудова навантажувальної та швидкісної діаграми механізму напору.
По отриманим результатам і рекомендаціям наведених в Додатку3, будуємо завантажувальну та швидкісну діаграми механізму напору ( Рис. 14)
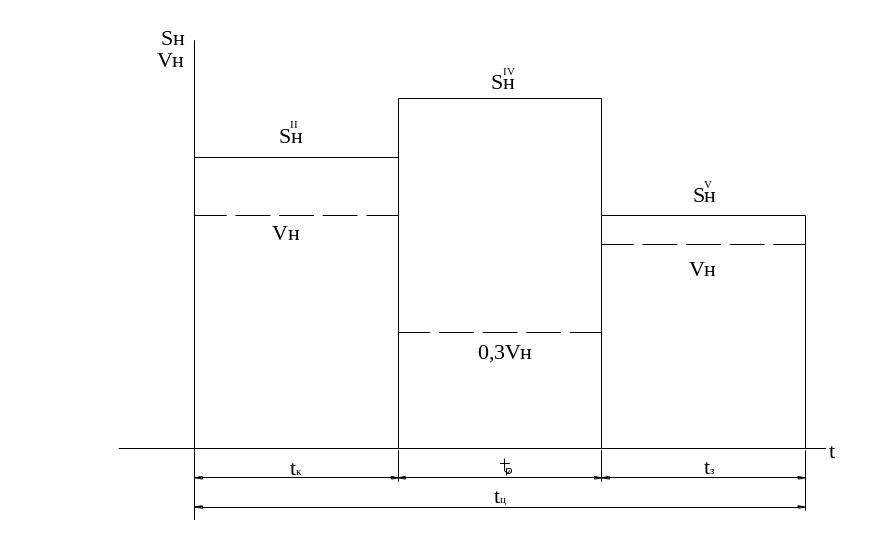
Рис. 14. Навантажувальна та швидкісна діаграми механізму напору
3.5. Розрахунок поворотного механізму екскаватора
3.5.1. Поворотний механізм (рис. 15) служить для обертання поворотної платформи з механізмами і робочим обладнанням.
Привід повороту здійснюється завдяки двом однаковим механізмам, кожен з яких складається з електродвигуна і редуктора. Колодчате гальмо потрібне для гальмування механізму повороту при русі екскаватора.
Потужність механізму повороту одноковшових екскаваторів залежить від багатьох факторів, головним з яких є кутове прискорення і частота обертання поворотних частин екскаватора, момент інерції обертання платформи екскаватора і кут повороту платформи. При кутах повороту менше 90º, постійний рух відсутній. В такому випадку на величину потужності двигунів найбільший вплив створюють сили інерції, тобто умова прискорення при розгоні і момент інерції поворотних частин екскаватора.
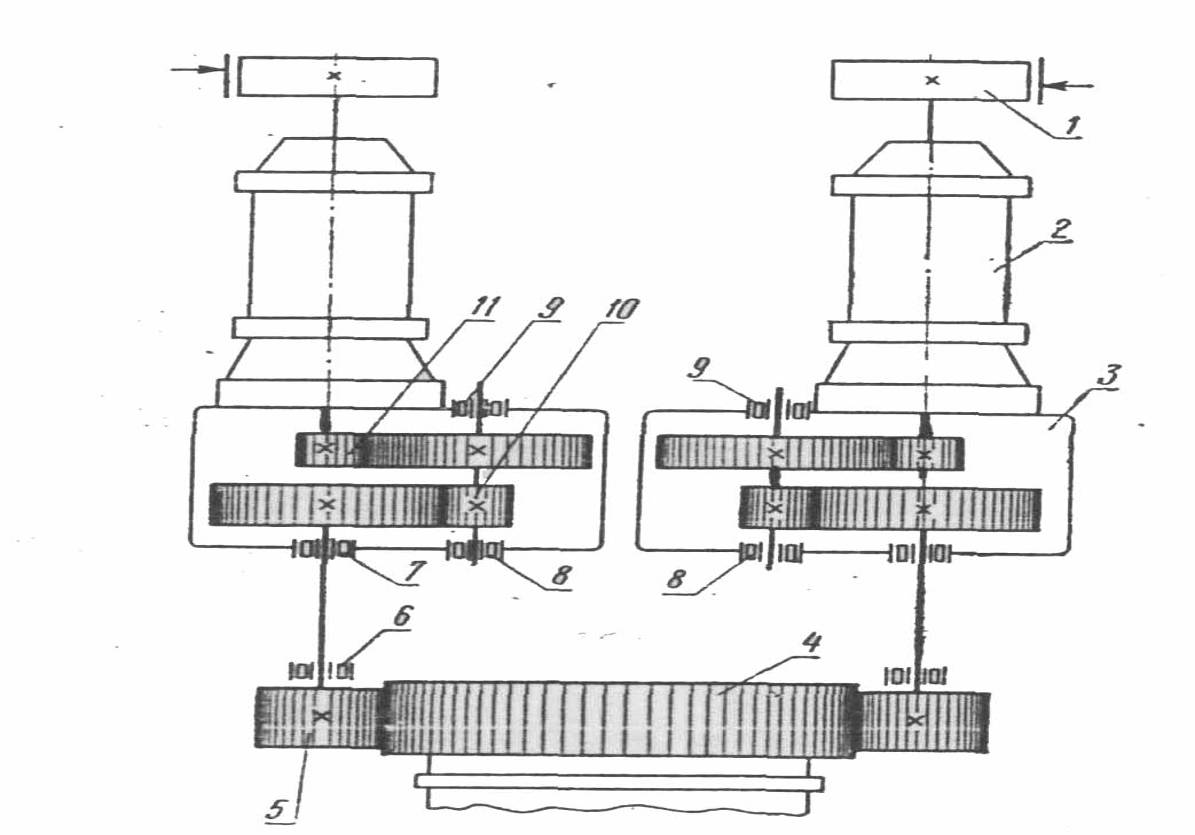
Рис. 15. Кінематична схема поворотного
механізму
1 – механізм гальмування;
2 – електродвигун; 3 – редуктор; 4 –
зубчатий вінець; 5, 10, 11 – шестерні;
6, 7, 8, 9 – підшипники.
3.4.2. Середня швидкість повороту платформи екскаватора розраховується:
|
ωср
=
|
3.4.3. Максимальна швидкість повороту:
|
ωmax = 2·ωср, рад/с. (49) |
3.4.4. Побудова швидкісної діаграми повороту
На основі отриманих результаті та Додатку 3 будується швидкісна діаграма повороту (Рис.16)

Рис. 16. Швидкісна діаграма поворотного механізму
3.4.5. Потужність двигунів повороту розраховується як:
|
Nп(св)
=
|
 ,
кВт
(50)
,
кВт
(50)