

2.3. Перетворення вихідних сигналів датчиків
Процес перетворення аналогових сигналів в цифрові, крім процедури перетворення, містить в собі операції обробки аналогових сигналів, визначених умовами надання заданої якості сигналу та в окремих випадках необхідністю проведення функціональних перетворень.
Більшість
датчиків
мають
великий
вихідний
опір
та
малий
динамічний
діапазон,
тому
необхідно
узгодження
параметрів
виходу
датчиків
з
параметрами
вхідних
ланцюгів
системи
обробки
даних.
В
якості
пристроїв
узгодження
найчастіше
застосовуються
операційні
підсилювачі,
які
являють
собою
підсилювачі
постійного
струму
з
великим
коефіцієнтом
підсилення
(наприклад
![]() ).
).
Розглянемо основні схеми ввімкнення операційних підсилювачів: Інвертуючий підсилювач, схема якого наведена на рис. 2.3.
38
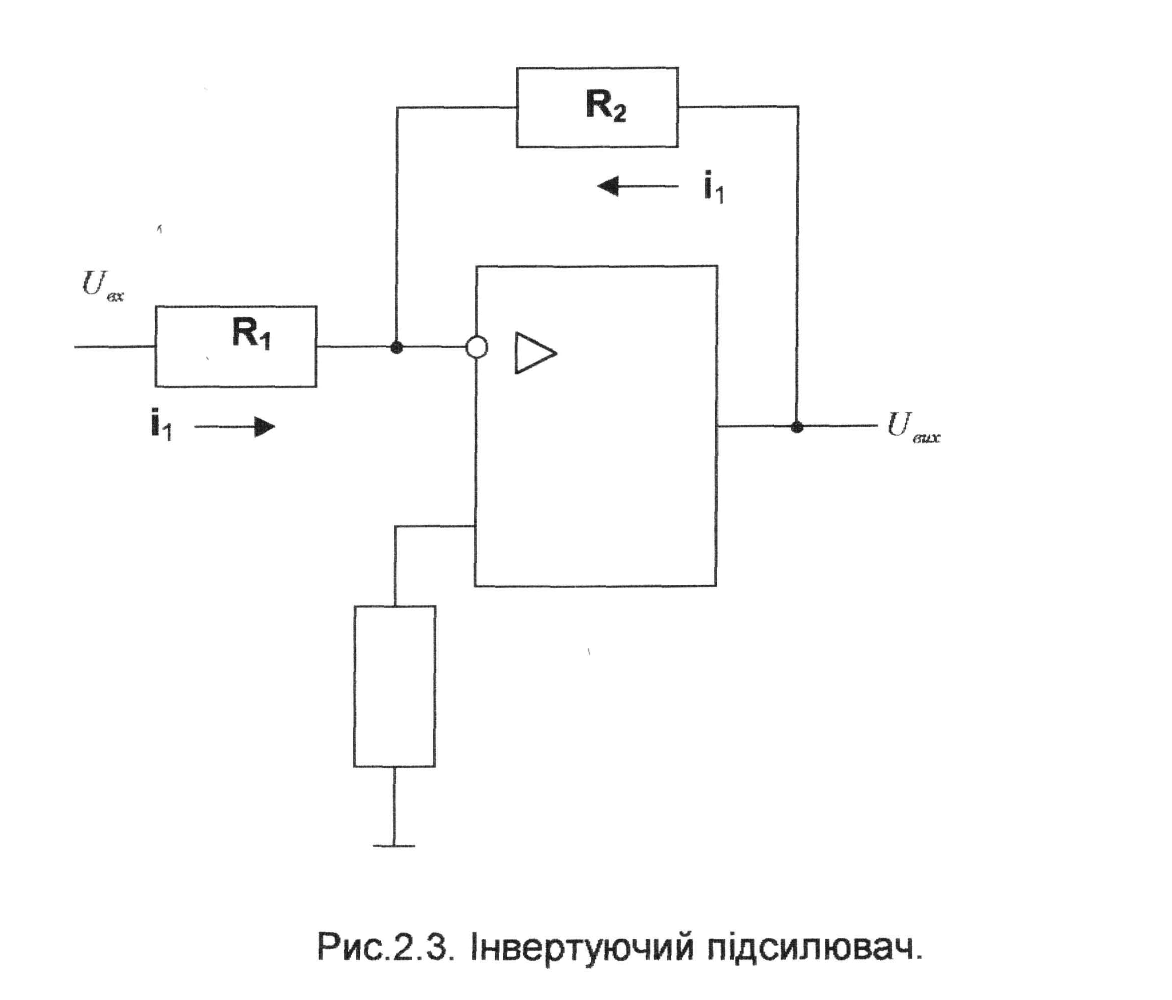
Перед аналізом схеми згадаємо основні правила:
1. Вихід операційного підсилювача прагне досягнути, щоб різниця напруг між його входами була рівна 0.
2. Входи операційного підсилювача струму не споживають.
Згідно з 1 законом Кірхгофа сума струмів, що входять в вузол дорівнює 0 та в силу правила 2 вхідний струм дорівнює 0.
Звідки :
![]() (2.30)
(2.30)
або коефіцієнт підсилення по напрузі:
![]() (2.31)
(2.31)
Недоліком схеми є те, що вона має малий вхідний імпеданс. Цей недолік усуває схема неінвертуючого підсилювача (рис.2.4.)
39
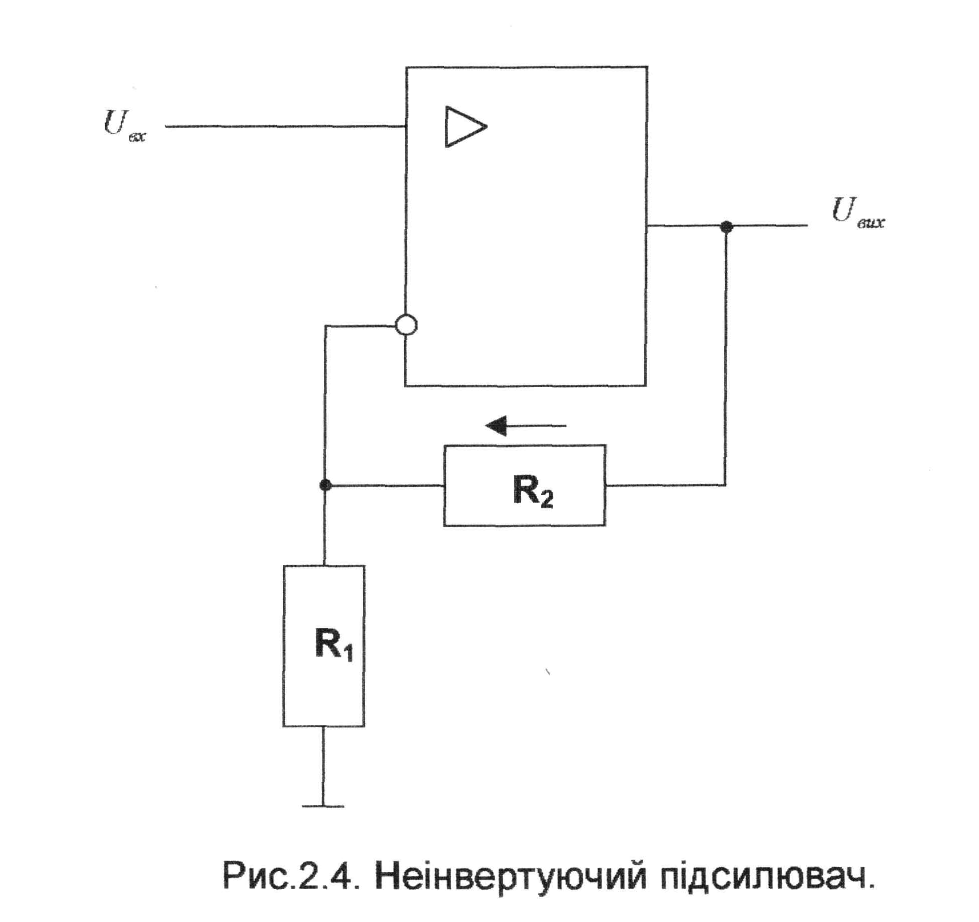
Для якого:
![]() (2.32)
(2.32)
Або коефіцієнт підсилення по напрузі:
![]() (2.33)
(2.33)
4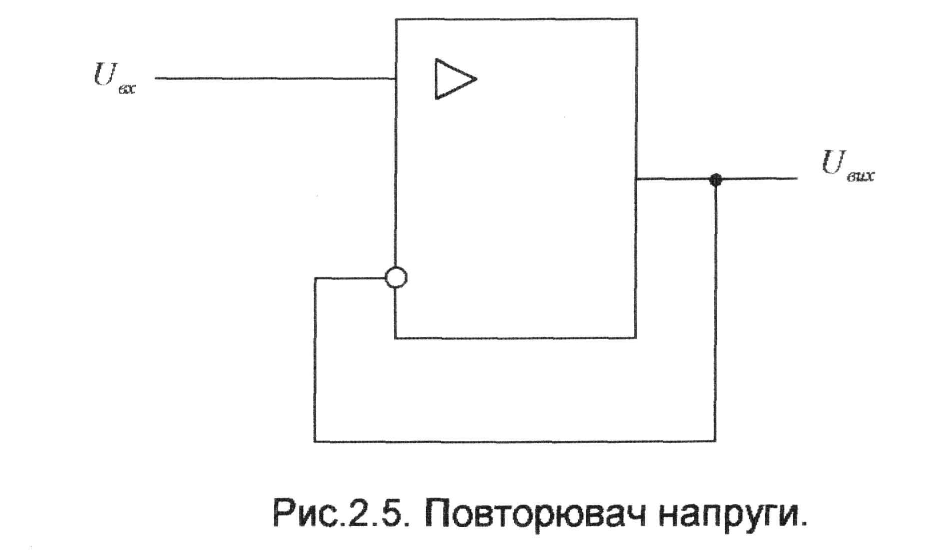 0
0
Такий підсилювач також називають буфером, тому що він має ізолюючі властивості (великий вхідний імпеданс та малий вихідний).
Схема диференційного підсилювача наведена на рис.2.6. і являє собою комбінацію інвертуючого та неінвертуючого підсилювачів.
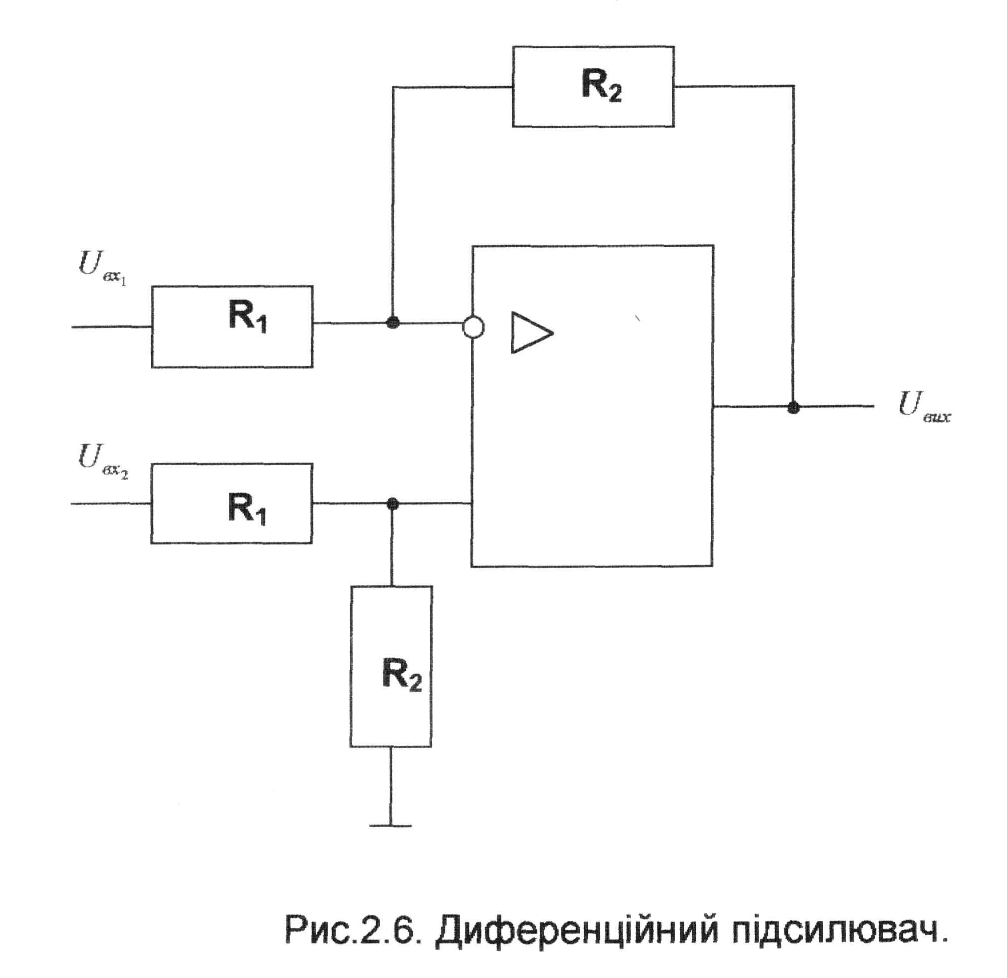
Для якого:
![]() (2.34)
(2.34)
На практиці часто необхідно ввести в вихідний сигнал диференційного підсилювача постійну складову. Це можна реалізувати шляхом підключення джерела зміщення до інвертуючого входу операційного підсилювача (рис.2.7).
41
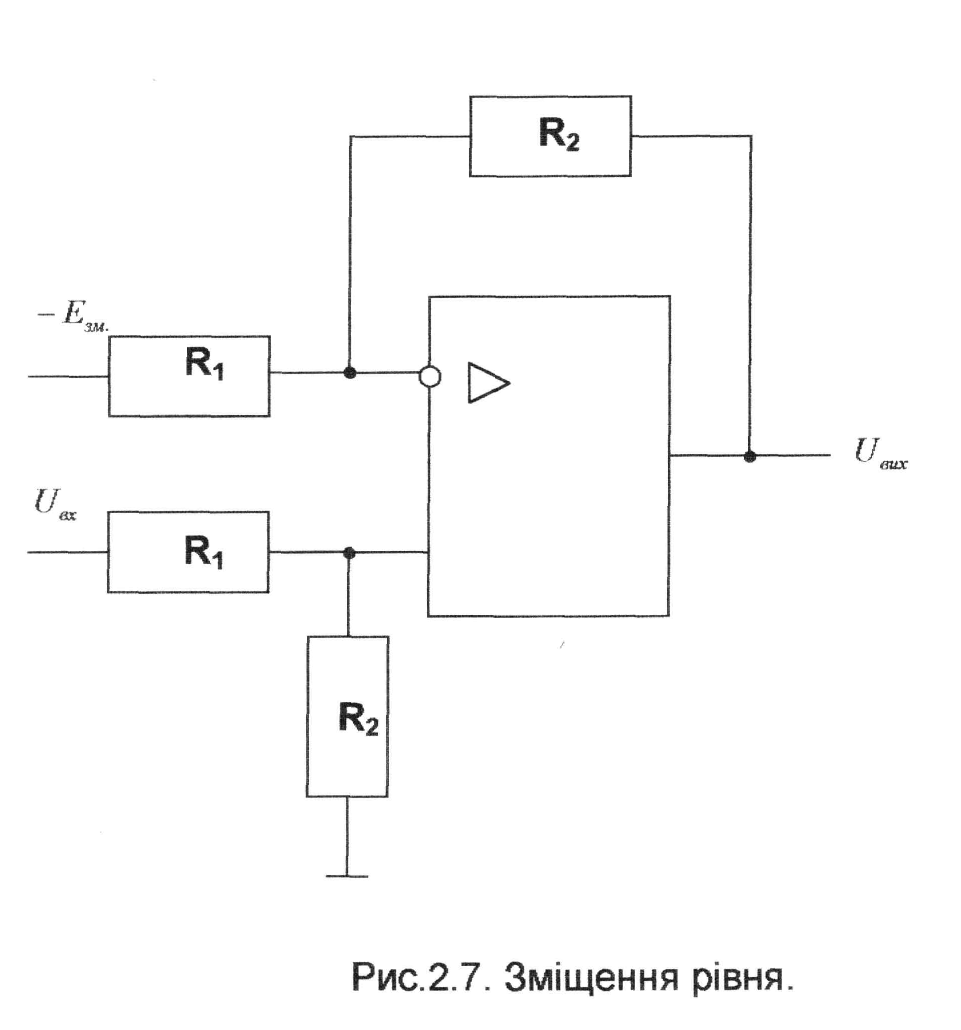
Для якого:
![]() (2.35)
(2.35)
тобто,
якщо
вхідний
сигнал
змінюється
в
межах
![]() до
до
![]() та
та
![]() ,
то вихідний
сигнал
буде
змінюватись
від
0 до
,
то вихідний
сигнал
буде
змінюватись
від
0 до
![]() .
Коефіцієнт
підсилення
k
визначається
відношенням
резисторів
.
Коефіцієнт
підсилення
k
визначається
відношенням
резисторів
![]() та
та
![]() .
.
Якщо вихідний сигнал датчика - струмовий, а для подальшої обробки сигналу необхідний рівень напруги, то його необхідно перетворити в напругу та підсилити до необхідного значення. Реалізуємо схему на базі операційного підсилювача (рис.2.8).
42
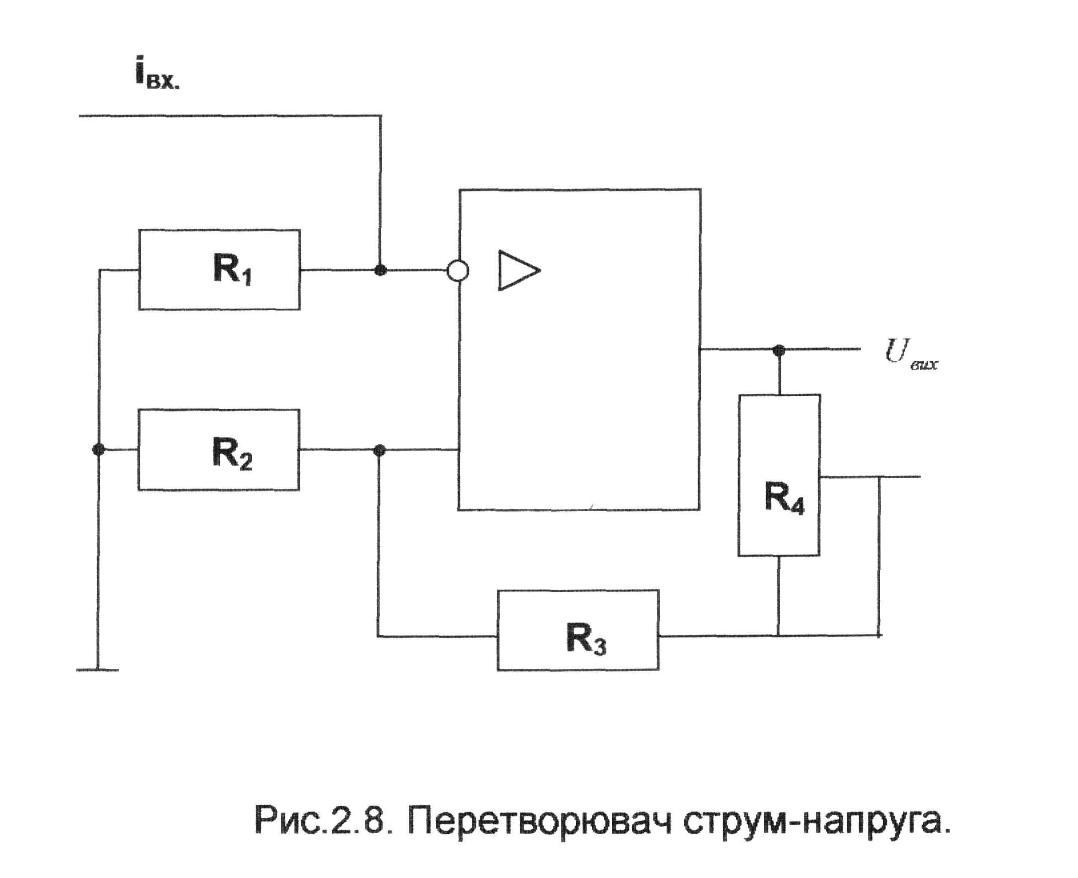
Перетворення
вхідного
струму
![]() в
напругу
здійснюється
на
резисторі
R1,
падіння
напруги
на
якому
підсилюється
на
операційному
підсилювачі,
який
ввімкнено
за
схемою
неінвертуючого
підсилювача.
Коефіцієнт
підсилення
визначається
відношенням
резисторів
R3+R4
та
R2.
Резистор
R4
використано
для
корекції
значення
коефіцієнту
підсилення.
в
напругу
здійснюється
на
резисторі
R1,
падіння
напруги
на
якому
підсилюється
на
операційному
підсилювачі,
який
ввімкнено
за
схемою
неінвертуючого
підсилювача.
Коефіцієнт
підсилення
визначається
відношенням
резисторів
R3+R4
та
R2.
Резистор
R4
використано
для
корекції
значення
коефіцієнту
підсилення.
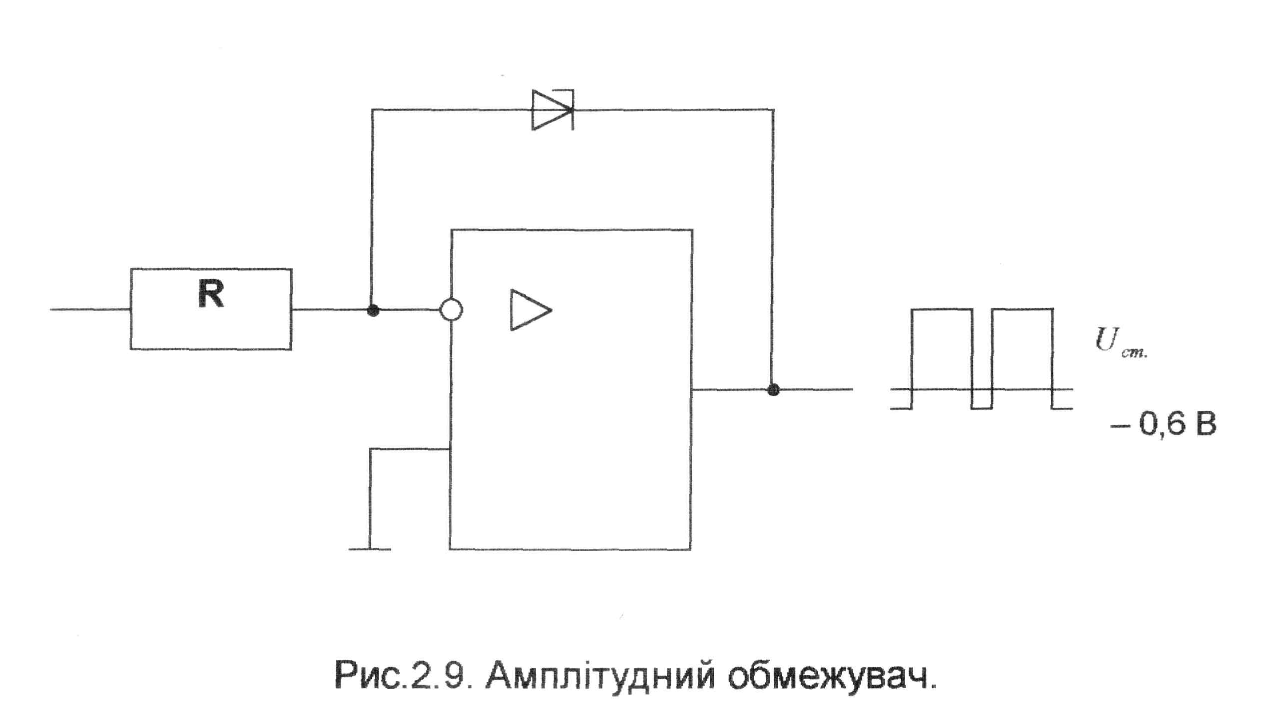
В таких випадках, якщо необхідно обмежити діапазон зміни сигналу, наприклад напруги, можна скористатись амплітудними обмежувачами (рис.2.9), які являють собою інвертуючий підсилювач, в ланцюг зворотнього зв'язку якого ввімкнено стабілітрон.
Напруга
стабілізації
![]() та
пряма
напруга
стабілітрона
визначають
та
пряма
напруга
стабілітрона
визначають
границі вихідної напруги. Вихідна напруга може бути інвертована шляхом зміни полярності ввімкнення стабілітрону.
43
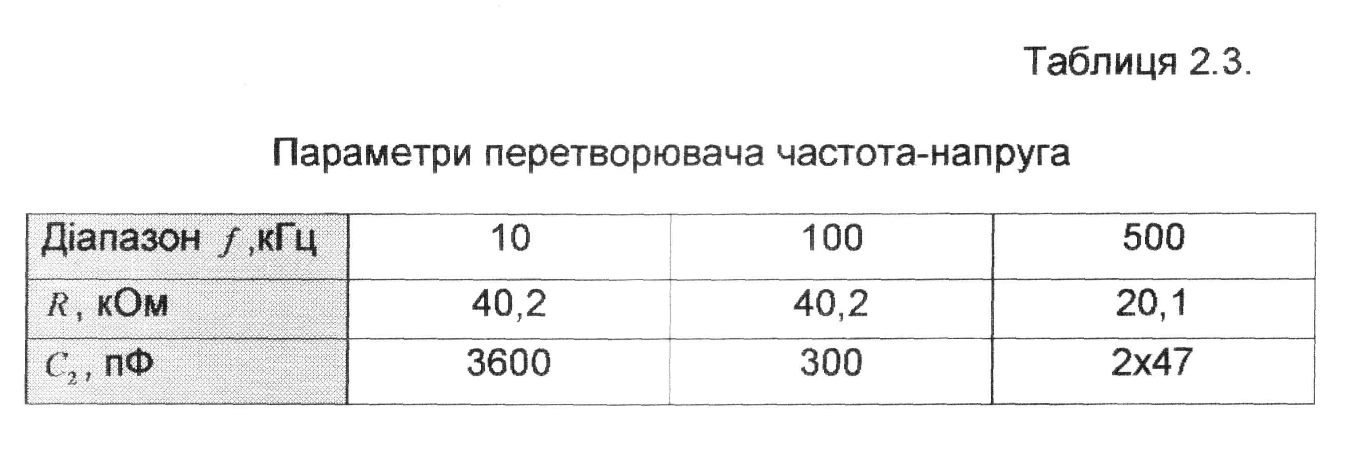
Для узгодження датчиків з частотним виходом використовують перетворювачі частота-напруга. В якості такого перетворювача можна використати мікросхему К1108ПП1. Схема ввімкнення мікросхеми в режимі перетворювача частота-напруга наведена на рис 2.10.
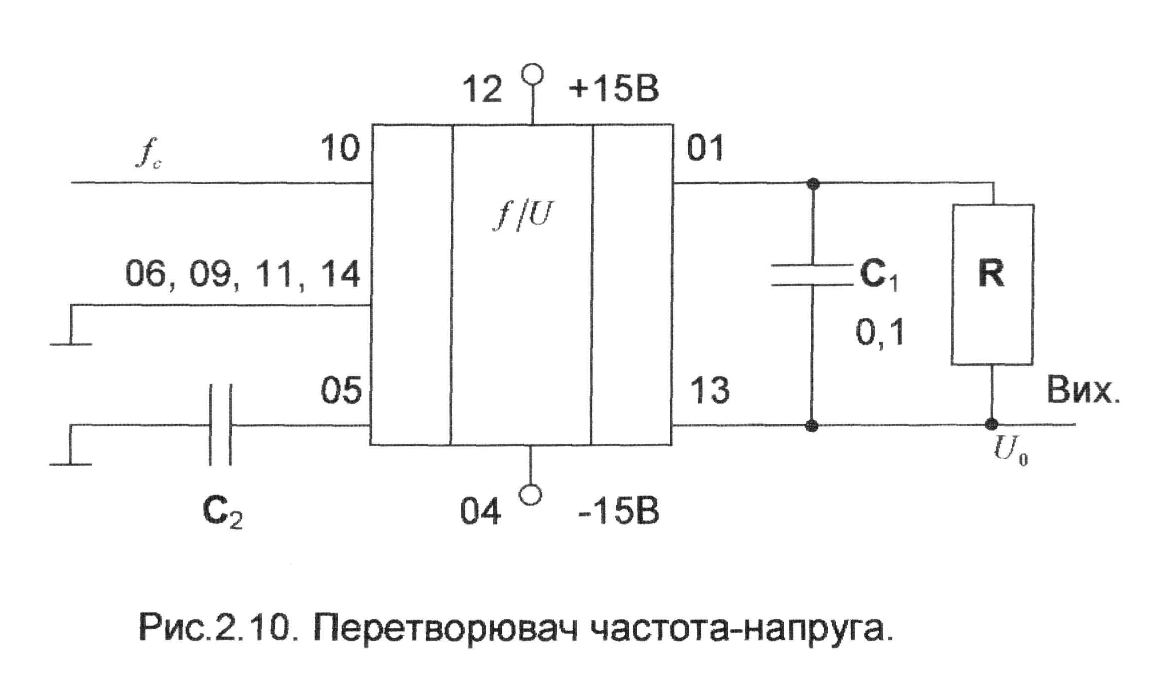
Для якої:
![]() (2.36)
(2.36)
де параметри R та С2 вибираються з табл.2.3, k = 7-8 В.
45
46
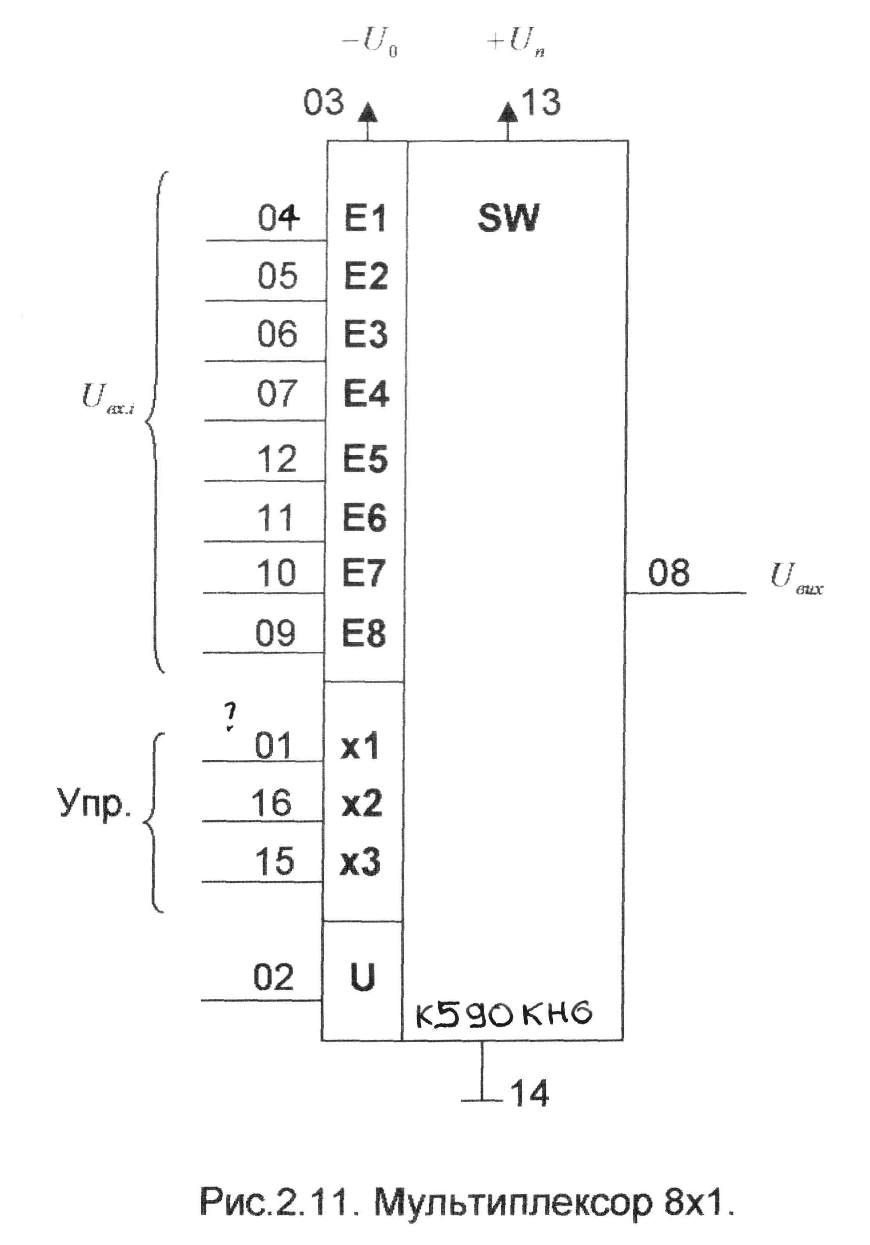
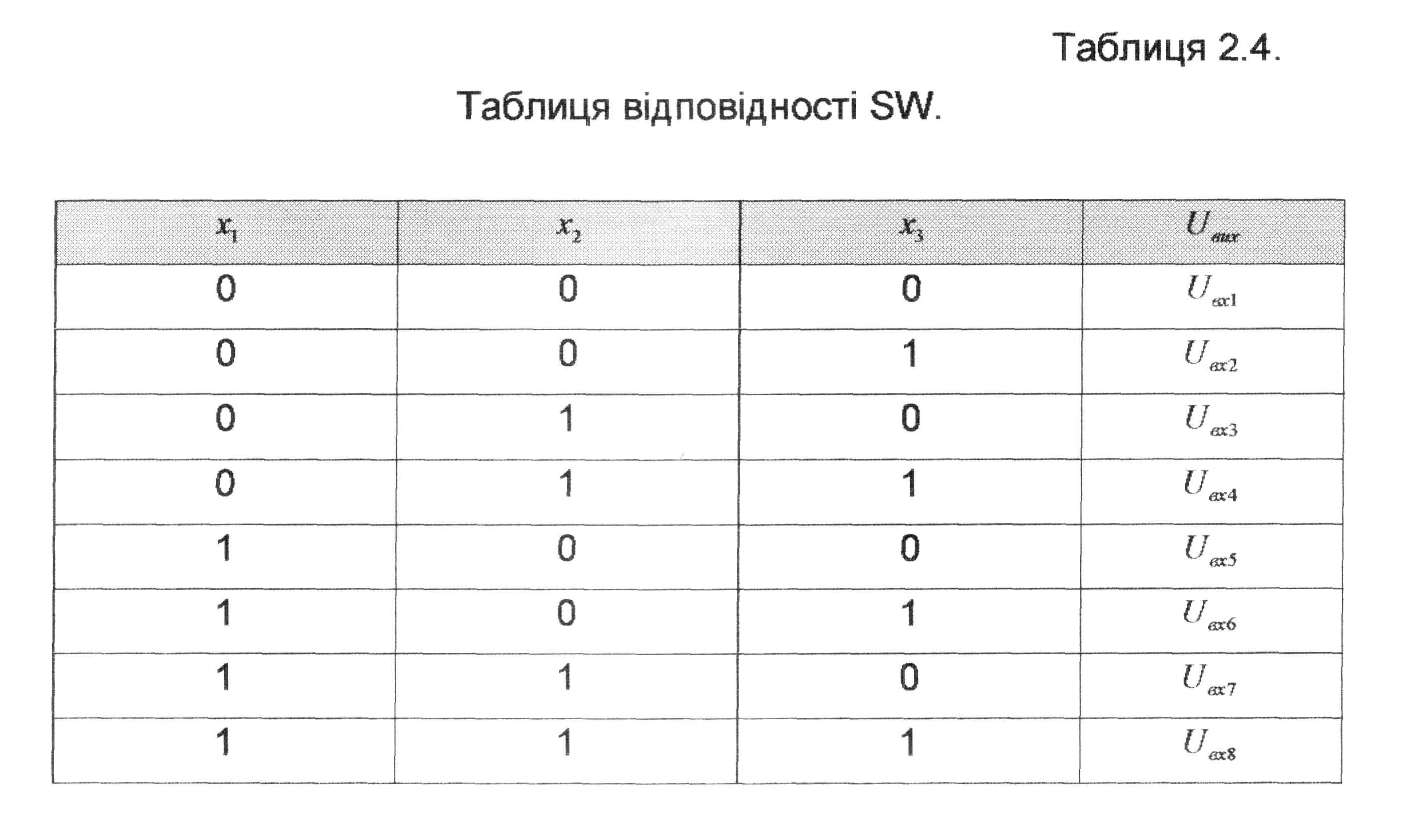
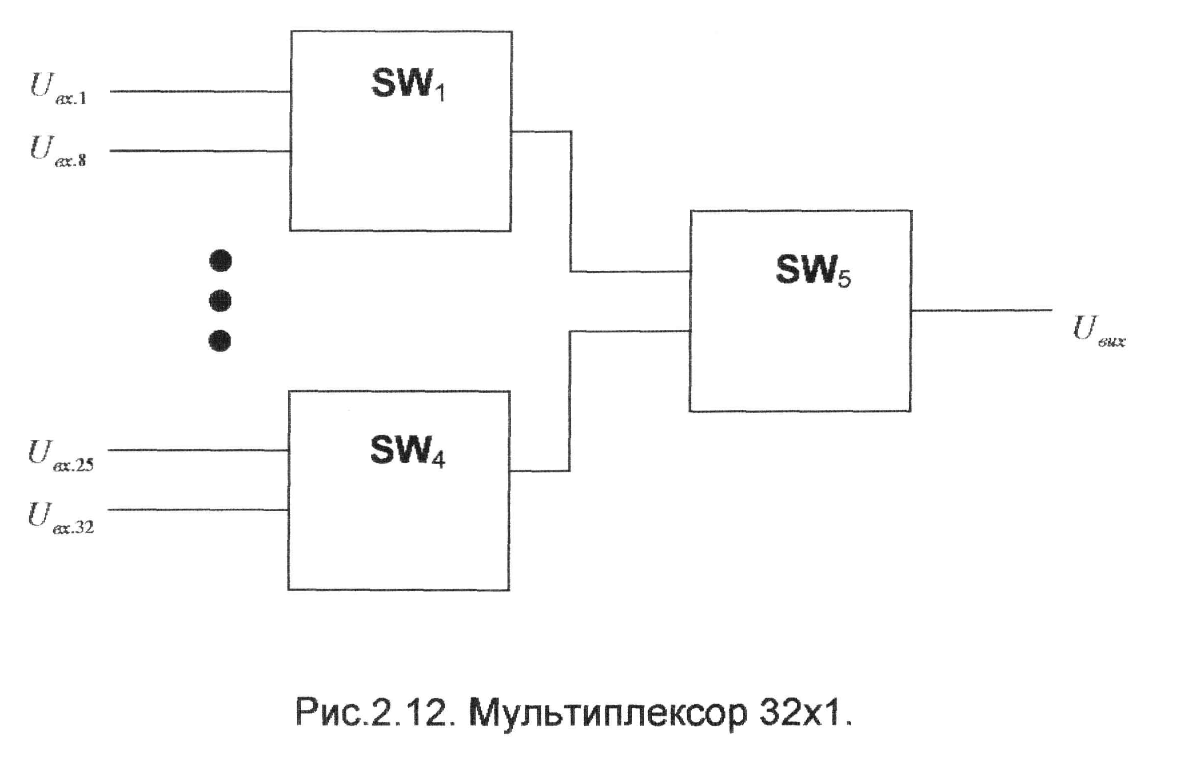
Подалі аналогові сигнали по паралельним каналам надходять на аналогові комутатори (мультиплексори). Для побудови мультиплексорів раціонально використовувати багатовхідні інтегральні комутатори, наприклад серії 590. Умовне графічне зображення мульплексора на 8 входів наведено на рис.2.11.
Даний
мультиплексор
має
можливість
комутації
сигналів,
рівень
яких
досягає
![]() ,у
відповідності
з
табл.2.4.
,у
відповідності
з
табл.2.4.
47
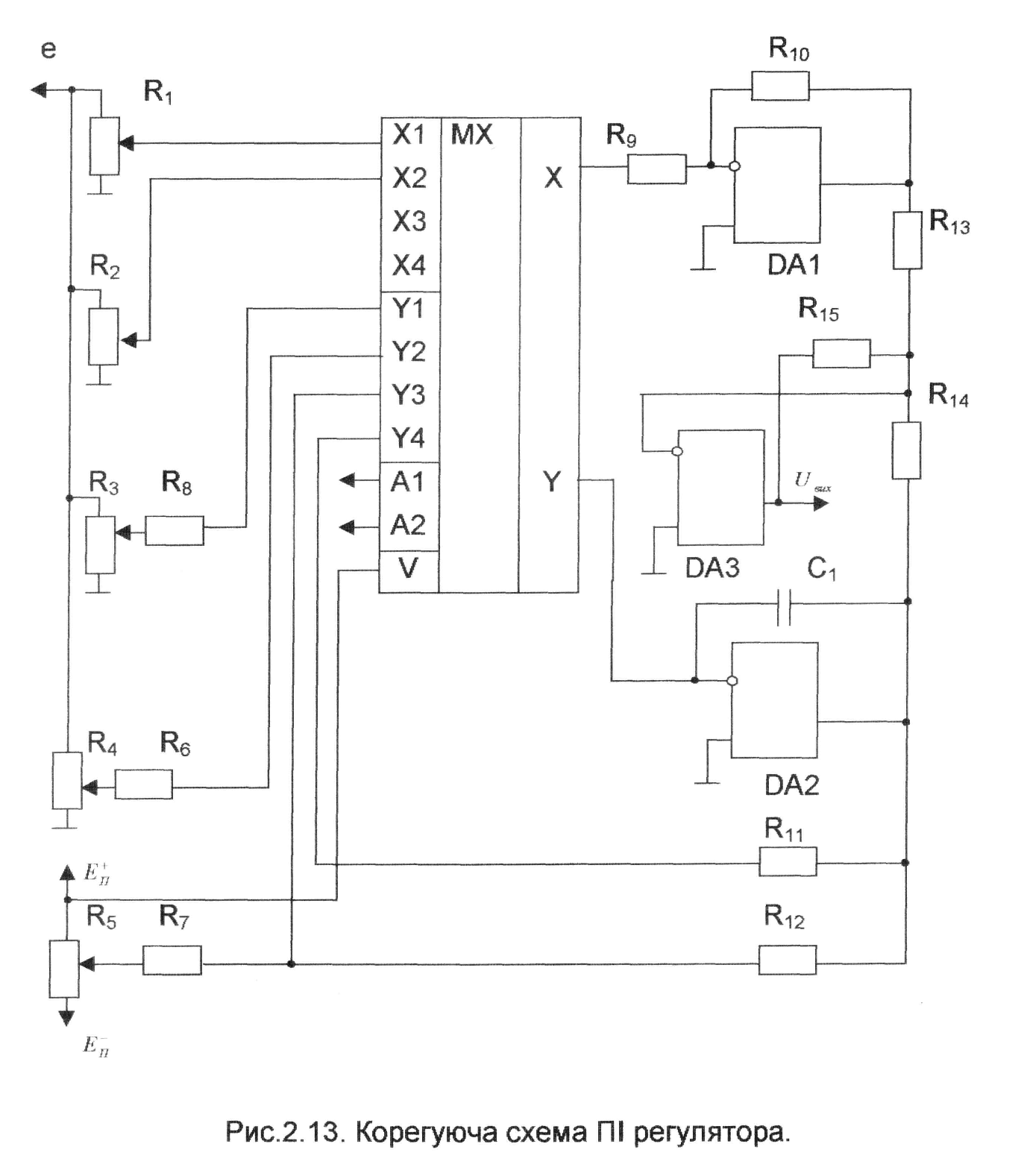
Застосування мульплексорів для переключення режимів роботи та зміни параметрів аналогових корегуючих пристроїв дозволяє отримати прості та надійні схеми. Розглянемо корегуючу схему пропорційно-інтегрального регулятора (рис.2.13).
48
Ця схема реалізує передаточну функцію
![]()
де
![]() - оператор
Лапласа;
- оператор
Лапласа;
![]() -
коефіцієнт
передачі
пропорційного
елементу
(DA1);
-
коефіцієнт
передачі
пропорційного
елементу
(DA1);
![]() -
коефіцієнт
передачі
i-го
потенціометра
пропорційного
елементу
(
-
коефіцієнт
передачі
i-го
потенціометра
пропорційного
елементу
(![]() для
R1,
для
R1,
![]() для
R2);
для
R2);
![]() -
коефіцієнт
передачі
інтегрального
елементу
(DA2);
-
коефіцієнт
передачі
інтегрального
елементу
(DA2);
![]() -
коефіцієнт
передачі
у-го
потенціометра
інтегруючого
елементу
(
-
коефіцієнт
передачі
у-го
потенціометра
інтегруючого
елементу
(![]() для
R3,
для
R3,
![]() для
R4).
для
R4).
Наведена схема дозволяє управляти параметрами пропорційного та інтегруючого елементів. При сигналі «0 на вході А2 схема працює в режимі формування управляючого впливу.
При сигналі «0» на вході А1 параметри корегуючої схеми задаються потенціометрами R1 і R3, при сигналі «0» - R2 і R4. Необхідність зміни параметрів корегуючої схеми виникає при управлінні об'єктами, або в випадку, коли необхідно змінити параметри процесу управління.
Схема
дозволяє
встановлювати
нульове
значення
вихідного
сигналу
![]() . Відключення
вихідного
сигналу
відбувається
при
рівні
«0»
на
вході
А1
і
«1»
на
вході
А2.
Для
інтегруючого
елементу
в
той
же
момент
встановлюється
початковий
нульовий
заряд
конденсатору
С1.
При
сигналах
«1»
на
входах
А1
і
А2
на
виході
інтегруючого
елементу
встановлюється
початкове
значення
напруги,
яка
задається
потенціометром
R5.
. Відключення
вихідного
сигналу
відбувається
при
рівні
«0»
на
вході
А1
і
«1»
на
вході
А2.
Для
інтегруючого
елементу
в
той
же
момент
встановлюється
початковий
нульовий
заряд
конденсатору
С1.
При
сигналах
«1»
на
входах
А1
і
А2
на
виході
інтегруючого
елементу
встановлюється
початкове
значення
напруги,
яка
задається
потенціометром
R5.
Для практичної реалізації схеми доцільно вибирати параметри елементів відповідно співвідношенням:
R10/R9
= KП;
R6=R8;
R6C1=1/Kj; R7=R12;
R11С1=![]() ;
R12C2=
;
R12C2=![]() ;
R13=R14=R15;
;
R13=R14=R15;
49
де - постійна часу кола розряду конденсатора С1 при заданні нульового значення вихідного сигналу ;
- постійна часу перезаряду конденсатора С1 при заданні початкового значення вихідного сигналу .
Мультиплексори
також
можуть
використовуватись
при
моделюванні
дії
дискретних
елементів
для
переключення
елементів,
які
фіксують
значення
неперервних
сигналів.
Зокрема,
можна
реалізувати
модель
квантувателя
неперервного
сигналу
(рис.2.14.а).
Управляючі
імпульси
![]() з
частотою
квантування
з
частотою
квантування
![]() поступають
на
вхід
лічильного
тригера
DD1.
На
виході
тригера
формуються
імпульси
з
тривалістю
поступають
на
вхід
лічильного
тригера
DD1.
На
виході
тригера
формуються
імпульси
з
тривалістю
![]() і
періодом
повторення
і
періодом
повторення
![]() (рис.2.14.б).
(рис.2.14.б).
Імпульси
визивають
переключення
мультиплексора
DA1
таким
чином,
що
на
протязі
одного
періоду
![]() вхідний
сигнал
вхідний
сигнал
![]() надходить
через
резистор
R1
на
конденсатор
С1,
а
вхід
операційного
підсилювача
DA2
підключається
до
конденсатору
С2.
На
протязі
другого
полуперіоду
через
резистор
R1
заряджається
конденсатор
С2,
а
на
вхід
операційного
підсилювача
подається
сигнал,
зафіксований
на
конденсаторі
С1.
Таким
чином,
при
роботі
схеми
на
вході
операційного
підсилювача
подається
кусочно-постійний
сигнал,
значення
якого
дорівнює
значенню
вхідного
сигналу
в
момент
переключення
тригера
DD1.
Операційний
підсилювач,
необхідний
для
зменшення
струму
розряду
конденсаторів
С1
і
С2
через
опір
навантаження.
При
R2=R3
модель
квантувателя
має
одиничний
коефіцієнт
передачі.
Ємності
конденсаторів
С1
і
С2
однакові,
їх
вибирають
таким
чином,
щоб
розряд
через
вхідні
ланки
операційного
підсилювача
на
протязі
одного
періоду
не
перевищував
заданої
похибки
фіксування
сигналу
при
виконанні
умови:
надходить
через
резистор
R1
на
конденсатор
С1,
а
вхід
операційного
підсилювача
DA2
підключається
до
конденсатору
С2.
На
протязі
другого
полуперіоду
через
резистор
R1
заряджається
конденсатор
С2,
а
на
вхід
операційного
підсилювача
подається
сигнал,
зафіксований
на
конденсаторі
С1.
Таким
чином,
при
роботі
схеми
на
вході
операційного
підсилювача
подається
кусочно-постійний
сигнал,
значення
якого
дорівнює
значенню
вхідного
сигналу
в
момент
переключення
тригера
DD1.
Операційний
підсилювач,
необхідний
для
зменшення
струму
розряду
конденсаторів
С1
і
С2
через
опір
навантаження.
При
R2=R3
модель
квантувателя
має
одиничний
коефіцієнт
передачі.
Ємності
конденсаторів
С1
і
С2
однакові,
їх
вибирають
таким
чином,
щоб
розряд
через
вхідні
ланки
операційного
підсилювача
на
протязі
одного
періоду
не
перевищував
заданої
похибки
фіксування
сигналу
при
виконанні
умови:
![]()
де
![]() - внутрішній прохідний опір відкритого
ключа
мультиплексора.
- внутрішній прохідний опір відкритого
ключа
мультиплексора.
Якщо
постійна
часу
заряду
конденсатора
![]() набагато
менше
то
до
моменту
закінчення
кожного
періоду
квантування
він
виявляється
зарядженим
до
напруги
вхідного
сигналу
.
набагато
менше
то
до
моменту
закінчення
кожного
періоду
квантування
він
виявляється
зарядженим
до
напруги
вхідного
сигналу
.
50
51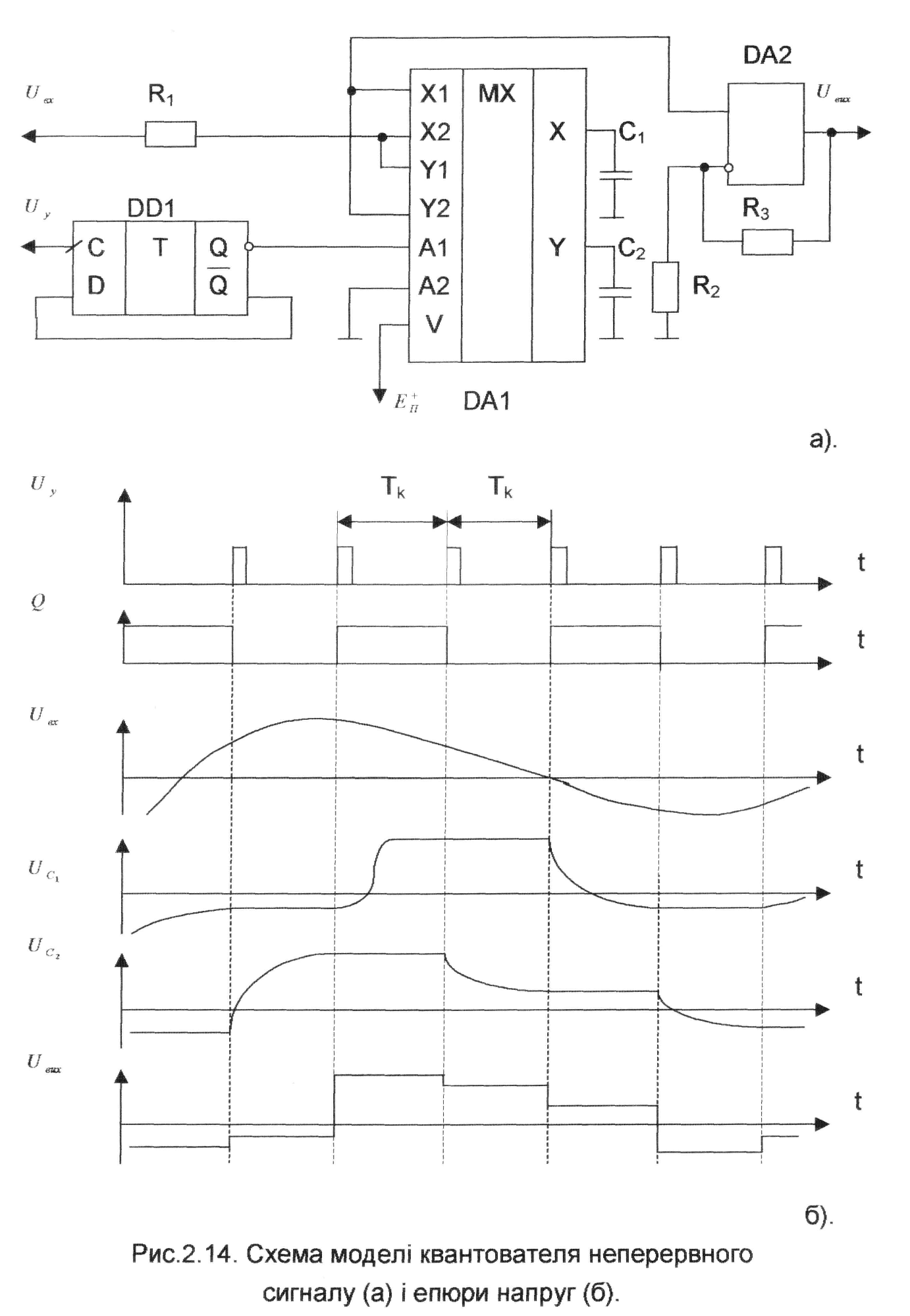
Для запам'ятовування зміних аналогових сигналів на час перетворення, комутації та інших операцій в системах використовують схеми виборки-зберігання (рис.2.15).
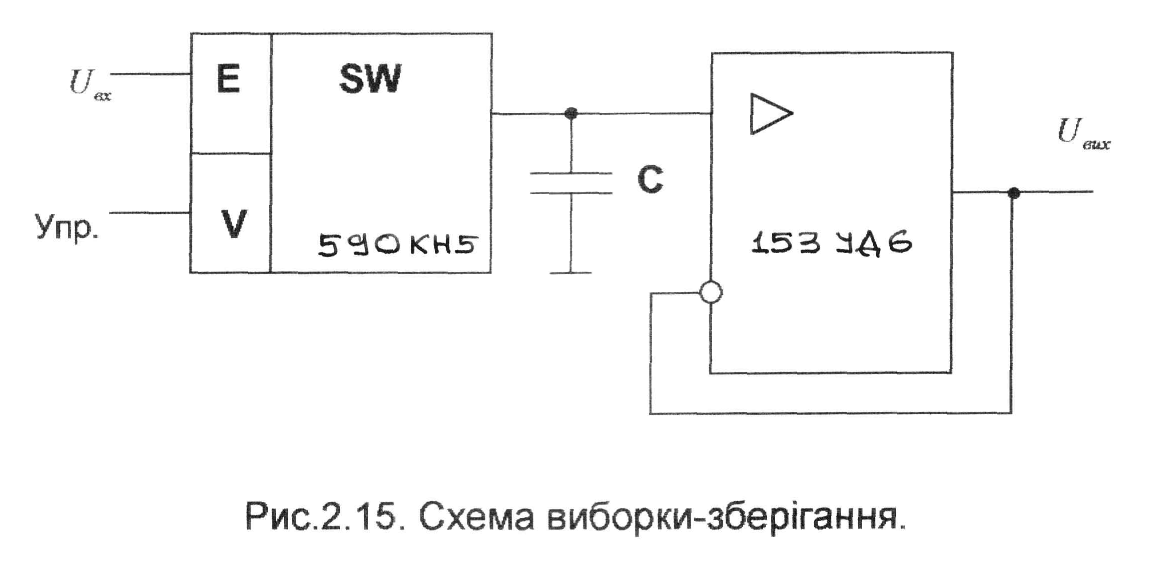
Елементом пам'яті схеми виборки-зберігання є конденсатор с, який підключається на час виборки до джерела сигналу. Час виборки сигналу визначається з співвідношення:
![]() ,
(2.37)
,
(2.37)
де
![]() -
опір
відкритого
ключа
(для
К590КН5
-
опір
відкритого
ключа
(для
К590КН5
![]() );
);
![]() - опір
джерела
сигналу;
С
- ємність
конденсатору.
- опір
джерела
сигналу;
С
- ємність
конденсатору.
Також
в
якості
схеми
виборки-зберігання
можна
використати
мікросхему
К1100СК2
- пристрій
виборки
та
зберігання
аналового
сигналу,
який
запам'ятовує
по
команді,
що
надходить
на
логічний
вхід
С1,
миттєве
значення
та
підтримуює
постійне
значення
на
виході
![]() .
Схема
ввімкнення
К1102СК2
наведена
на
рис.2.16.
.
Схема
ввімкнення
К1102СК2
наведена
на
рис.2.16.
52
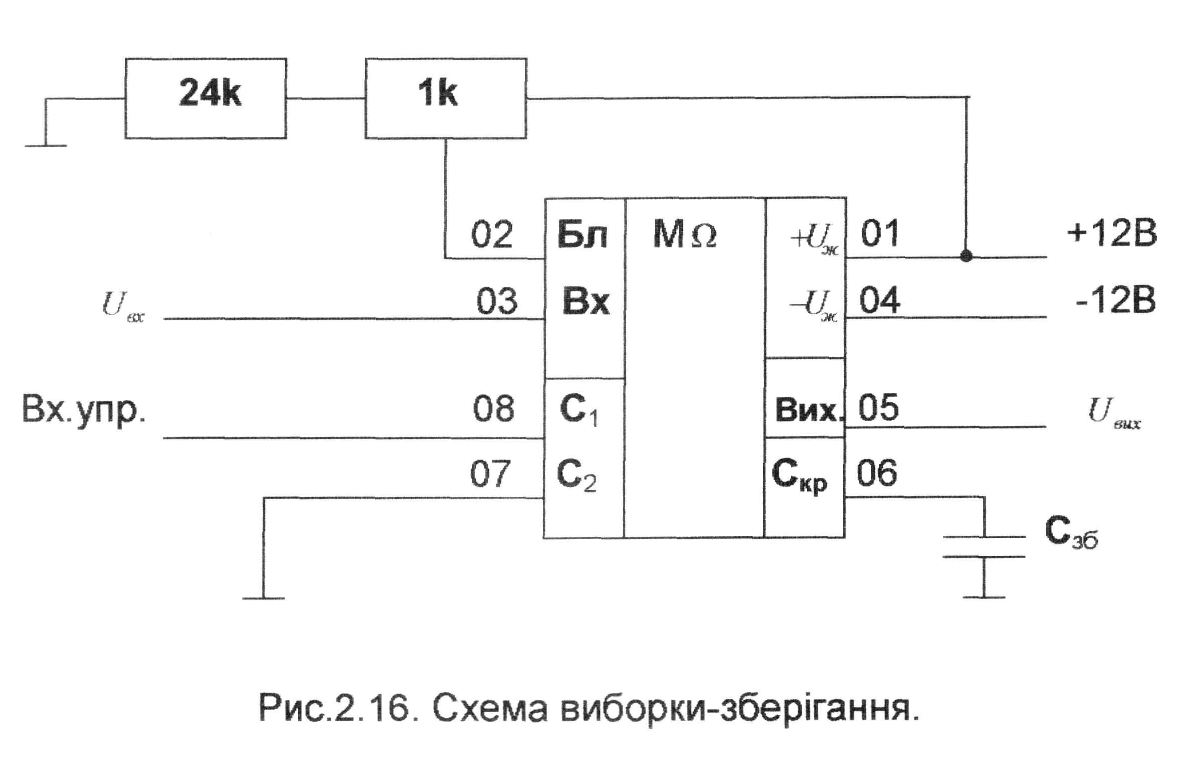
Вхідний
сигнал
= 5В.
Режим
виборки
відповідає
«1»
ТТЛ
рівня
на
вході
управління
C1:
«0»
- режиму
зберігання,
Cзб
= 1000пФ
при
![]() .
.
Після необхідних перетворень сигналів, що поступають з датчиків, потрібно перейти до процедури перетворення аналогових сигналів в цифровий код та подальшої їх обробки.