

2.2. Пристрої отримання інформації
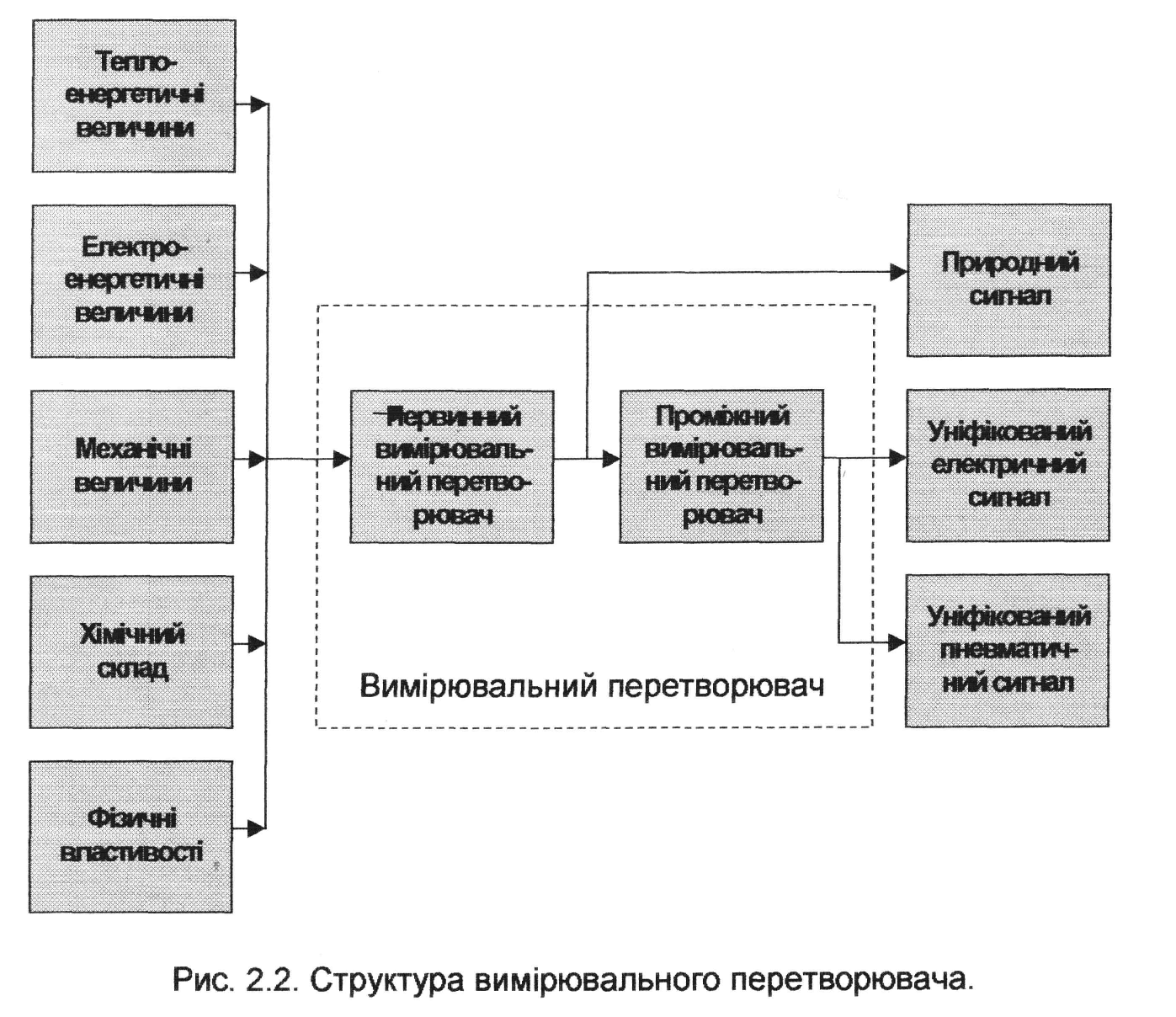
Пристрої отримання інформації призначені для збору та перетворення Інформації без змін її змісту про контролюючі та управляючі параметри технологічних процесів. До пристроїв отримання інформації про стан процесу відносяться чутливі елементи або датчики, вимірювальні та нормуючі перетворювачі. До цієї ж групи пристроїв відносяться релейні (позиційні) перетворювачі. Структура вимірювального перетворювача наведена на рис.2.2.
33
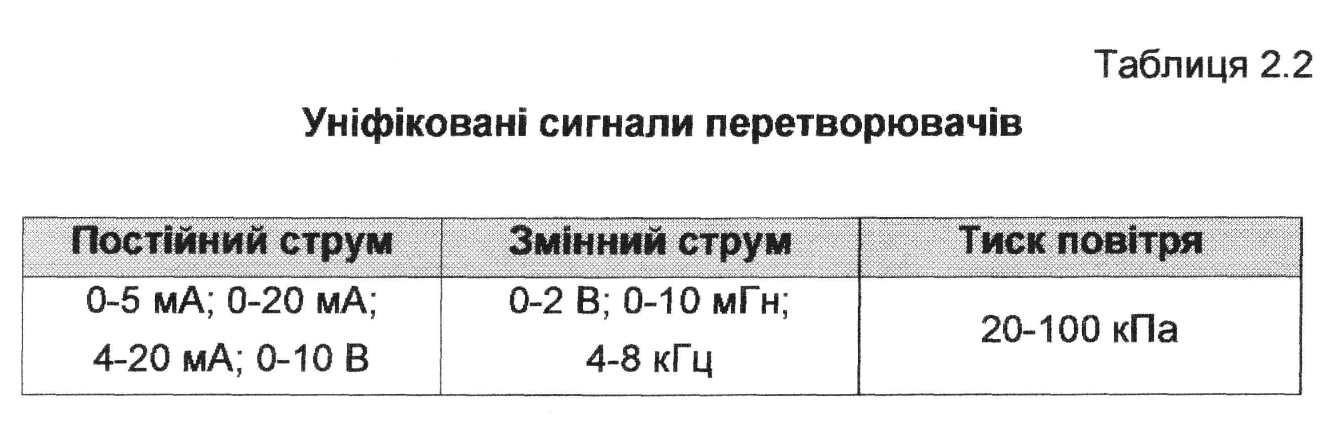
Вимірювальний перетворювач є сукупність чутливого елементу, вимірювального та нормуючого перетворювачів. Нормуючі перетворювачі переводять вихідний сигнал вимірювального перетворювача з природним виходом в уніфікований сигнал. В теперішній час найбільш поширені вихідні сигнали: напруга постійного та змінного струму, імпульси, модулюванні по амплітуді, ширині, фазі або частоті та тиск повітря. Величини основних уніфікованих сигналів встановлені відповідними стандартами та наведені в табл.2.2.
Для
організації
введення
даних
з
датчиків,
необхідно
здійснити
опитування
датчиків
та
визначити
значення
вимірювальних
величин
згідно
показників
датчиків.
Режим
отримання
даних
з
об'єкту
управління
реалізується
за
допомогою
циклічного
та
адресного
опитування
датчиків.
При циклічному опитуванні періодично
опитуються
в попередньо
заданій
та
встановленій
послідовності.
При
цьому
в
кожному
циклі
(такту
квантування)
окремі
датчикі
опитуються
декілька
разів
через
проміжки
часу
![]() .
Результати
.
Результати
![]() опитувань
усереднюються
та
середні
значення
запам'ятовуються.
Після
цього
через
проміжок
часу,
що
дорівнює
періоду
квантування
опитувань
усереднюються
та
середні
значення
запам'ятовуються.
Після
цього
через
проміжок
часу,
що
дорівнює
періоду
квантування
![]() ,
весь
процес
повторюється,
тобто
датчикі
знову
опитуються
разів
з
дискретністю
та
результати
опитувань
усереднюються.
Для
більшої
точності
бажано,
щоб
,
весь
процес
повторюється,
тобто
датчикі
знову
опитуються
разів
з
дискретністю
та
результати
опитувань
усереднюються.
Для
більшої
точності
бажано,
щоб
![]() при
обмеженні
при
обмеженні
![]() .
.
При адресному опитуванні за адресою, вказаною оператором або визначеною автоматично, опитується один або декілька датчиків. Для використання результатів опитування в алгоритмах управління необхідно визначити істинні значення вимірювальних величин згідно показників датчиків. Вихідний сигнал датчика y пов'язаний з істинним
34
значенням
вимірювального
параметру
X
в
загальному
випадку
нелінійною
залежністю
вигляду
![]() .
Для
визначення
вимірювальної
величини
X
по
показникам
датчика
.
Для
визначення
вимірювальної
величини
X
по
показникам
датчика
![]() розроблено
багато
алгоритмів.
розроблено
багато
алгоритмів.
При лінійній характеристиці датчика значення вимірювальної змінної визначається слідуючим чином;
![]() ,
(2.17)
,
(2.17)
де
![]() -
нижня
та
верхня
границі
шкали
вимірювального
параметру;
-
нижня
та
верхня
границі
шкали
вимірювального
параметру;
![]() -
нижня
та
верхня
границі
вихідних
сигналів
датчика;
-
нижня
та
верхня
границі
вихідних
сигналів
датчика;
х - поточне значення параметру X
у - вихідний сигнал датчика, який відповідає поточному значенню
параметру х при кожному опитуванні.
При квадратичній характеристиці датчика значення параметру визначається як:
![]() (2.18)
(2.18)
Якщо залежність X від аналітичне визначити неможливо, то для визначення істинного значення вимірювального параметру використовуються апроксимуючі поліноми:
![]() (2.19)
(2.19)
де
![]() - постійні
коефіцієнти,
які
визначаються
таким
чином,
щоб
похибка
апроксимації
(2.19) не
перевищувала
допустимого
у
всьому
інтервалі
зміни
вимірювального
параметру
- постійні
коефіцієнти,
які
визначаються
таким
чином,
щоб
похибка
апроксимації
(2.19) не
перевищувала
допустимого
у
всьому
інтервалі
зміни
вимірювального
параметру
![]() і
сигналу
і
сигналу
![]() значення,
отриманого
з
датчика.
значення,
отриманого
з
датчика.
Оцінка точності представлення сигналів.
Реальний
фізичний
сигнал
![]() ,
знімаємий
з
виходу
датчика,
перетворюється
у
відповідний
цифровий
код.
Зв'язок
між
реальним
,
знімаємий
з
виходу
датчика,
перетворюється
у
відповідний
цифровий
код.
Зв'язок
між
реальним
35
сигналом
та
точним
незбудженим
значенням
сигналу
на
виході
датчика
![]() може
бути
представлений
у
вигляді:
може
бути
представлений
у
вигляді:
![]() (2.20)
(2.20)
де
![]() -
похибка,
яка
визвана
недосконалістю
динамічної
-
похибка,
яка
визвана
недосконалістю
динамічної
характеристики датчика;
![]() -
високочастотний
низького
рівня
шум
на
виході
датчика;
-
високочастотний
низького
рівня
шум
на
виході
датчика;
![]() -
можливі
збої
в
роботі
датчика;
-
можливі
збої
в
роботі
датчика;
![]() -
випадкова
завада,
яка
обумовлена
дрейфом
коефіцієнтів
градуйованої
характеристики
датчика
у
результаті
старіння
та
інших
причин.
-
випадкова
завада,
яка
обумовлена
дрейфом
коефіцієнтів
градуйованої
характеристики
датчика
у
результаті
старіння
та
інших
причин.
Вплив високочастотної завади може бути послаблений застосуванням алгоритмів усереднення, які реалізують функції виділення постійної складової сигналу в реальному часі та фільтрації випадкових вибросів.
Для реалізації фільтрів високочастотної завади застосовується алгоритм усереднення з нескінченою пам'яттю. Допустимо, що на сигнал постійної величини накладається випадкова завада так, щоб вимірювальний сигнал, який знімається з датчика, дорівнював:
![]() (2.21)
(2.21)
Визначимо
оцінку
постійного
сигналу
![]() по
методиці
найменших
квадратів:
по
методиці
найменших
квадратів:
![]() (2.22)
(2.22)
Завдяки
мінімізації функції втрат
![]() із
умови
із
умови
![]() отримуємо
усереднену
оцінку:
отримуємо
усереднену
оцінку:
![]() (2.23)
(2.23)
36
Алгоритм
усереднення
в
рекурентній
формі
отримується
шляхом
віднімання
попередньої
оцінки
![]() із
(2.23):
із
(2.23):
![]() (2.24)
(2.24)
Розглянутий
алгоритм
не
застосовується
для
оцінки
сигналу
![]() ,
який
змінюється
повільно.
В
цьому
випадку
застосовується
алгоритм
усереднення
з
послаблюючою
пам'яттю.
В
попередньому
алгоритмі
передбачувалось,
що
оцінювальна
координата
в
інтервалі
,
який
змінюється
повільно.
В
цьому
випадку
застосовується
алгоритм
усереднення
з
послаблюючою
пам'яттю.
В
попередньому
алгоритмі
передбачувалось,
що
оцінювальна
координата
в
інтервалі
![]() вимірювань
залишається
постійною.
В
цьому
випадку
окремі
вимірювання
вимірювань
залишається
постійною.
В
цьому
випадку
окремі
вимірювання
![]() входять
з
однаковими
вагами,
незалежних
від
дискретного
часу
входять
з
однаковими
вагами,
незалежних
від
дискретного
часу
![]() .
Якщо
потрібно
відслідкувати
повільно
змінюючий
сигнал
,
то
новим
вимірюванням
необхідно
надавати
більшої
ваги
порівняно
з
тими,
які
були
враховані
раніше.
.
Якщо
потрібно
відслідкувати
повільно
змінюючий
сигнал
,
то
новим
вимірюванням
необхідно
надавати
більшої
ваги
порівняно
з
тими,
які
були
враховані
раніше.
Усереднена оцінка параметру:
![]() (2.25)
(2.25)
де
величина
![]() вибирається
порядку
0.95.
вибирається
порядку
0.95.
Алгоритм усереднення отримаємо у вигляді:
![]() (2.26)
(2.26)
де
![]() - усереднене
значення
сигналу
- усереднене
значення
сигналу
![]() ,
знімаємого
з
датчика.
,
знімаємого
з
датчика.
Для усунення застосовують алгоритми відхилення
контролюючого
параметру
за
допустимі
межі.
Найпростіший
алгоритм
базується
на
відбраковці
слідуючого
опитаного
сигналу
при
виході
його
за
відомий
діапазон
зміни
.
Якщо
відома
похибка
надання
сигналу
![]() та
діапазон
зміни
та
діапазон
зміни
![]() ,
то
значення
сигналу
,
то
значення
сигналу
при -тому опитуванні бракується, якщо для нього не виконується умова:
![]() (2.27)
(2.27)
37
При
цьому
замінюється
останнім,
попереднім
за
часом
не бракованим
значенням
сигналу
.
Більш
ретельне
усунення
збоїв
виконується
з
урахуванням
діапазону
![]() та
швидкості
зміни
та
швидкості
зміни
![]() при
відомій
похибці
надання
сигналу
.
При
цьому
сигнал
бракується,
якщо
не
виконуються
хоча
б
одна
з
нерівностей:
при
відомій
похибці
надання
сигналу
.
При
цьому
сигнал
бракується,
якщо
не
виконуються
хоча
б
одна
з
нерівностей:
(2.28)
![]() (2.29)
(2.29)
При перетворенні в АЦП аналогового сигналу в цифровий код виникає похибка округлення, яка дорівнює половині останнього вірного розряду коду числа, яку умовно можна віднести до складової .