

4. Синтез систем логічного управління
Серед різновиду систем управління важливе місце займають системи логічного управління (СЛУ). Характерним признаком цих систем є застосування двійкових датчиків та виконавчих механізмів у вигляді джерел вхідних і приймачів вихідних сигналів. При проектуванні СЛУ широко використовуються типові СІС та БІС, що дозволяють реалізувати апаратним (схемотехнічним) шляхом складні функції й алгоритми. До числа таких СІС відносяться арифметико-логічні, регістрові, рахувальні та тригерні пристрої, суматори множники, мультиплексори, шифратори, компаратори та ін. Менш відомі в практиці проектування такі СІС, як мультиплексори (MX), щo являють собою логічний пристрій, що містить g-управляючих входів U1, U2, ..., Ug; 2g інформаційних входів D0, D1, ..., D2g-1, стробуючий вхід та вихід. При подачі на управляючі входи деякої комбінації двійкових сигналів і відповідного сигналу на вхід стробування до виходу Y мультиплексора підключається той інформаційний вхід, порядковий номер якого відповідає вазі двійкової комбінації управляючих сигналів.
Побудова логічних схем на мультиплексорах проводиться у вигляді структур, що відрізняються способами функціонального розділення і розкладення булевих функцій (БФ). Найбільш часто на практиці застосовується розкладання БФ по способу Шеннона:
![]()
де
![]() - залишкові функції розкладання, що
одержуються із функції
шляхом
підстановки
констант
0 і
1 замість
змінних
множини
- залишкові функції розкладання, що
одержуються із функції
шляхом
підстановки
констант
0 і
1 замість
змінних
множини
![]()
для
![]() маємо
маємо
![]()
для
![]() маємо
маємо
![]()
для
![]() l
маємо
l
маємо
![]()
Наприклад, булева функція має вид:
97
![]()
![]()
Для
компактності
представлення
заданої
булевої
функції
використовують
десяткову
форму
запису
з
позначенням
нею
окремих
термів
(кон'юнкцій),
представивши
її
у
вигляді
множини
![]() :
:
![]()
З урахуванням специфіки роботи мультиплексорів і конструктивних особливостей їх реалізації з числом управляючих входів g=2,3,4 та інформаційних входів, рівним 2g (4,8,16), розкладання заданої БФ можна вести за двома, трьома або чотирма змінними. Тоді при побудові логічної схеми на мультиплексорах змінні повинні підключатись до управляючих входів а залишкові функції (ЗФ) розкладання - до інформаційних входів відповідного MX. Якщо утворені в результаті першого кроку ЗФ мають нетривіальний вид, то процедура розкладання кожної, що одержуємо на черговому кроці залишкові функції, повинна повторюватись до моменту перетворення їх у тривіальні, а саме:
![]() 0
(відсутня)
0
(відсутня)
Залишкові
функції
розкладання
Qt
по
останнім
двом
![]() ,
трьом
,
трьом
![]() ,
чотирьом
,
чотирьом
![]() змінним
з
булевої
функції
змінним
з
булевої
функції
![]() можуть
бути
обчислені
за
формулами:
можуть
бути
обчислені
за
формулами:
![]()
де t=0,1,...,2g-1;
![]() -
ціла
частина
від
ділення
-
ціла
частина
від
ділення
![]() ;
;
![]() -
залишок частина від ділення
;
-
залишок частина від ділення
;
- множина термів БФ;
g - число змінних, по яким розкладається БФ.
98
При побудові логічної схеми на MX, що реалізує задану БФ, можливі два випадки: a) n<=g; б) n>g.
В
першому
випадку
БФ
реалізується
схемою,
що
складається
з
одного
мультиплексора,
в
якому
g
змінних
![]() підключається
до
управляючих
входів
MX,
а
на
інформаційні
входи
подаються
константи
0
(якщо
данний
терм
у
функції
відсутній)
або
1 (якщо
він
присутній).
підключається
до
управляючих
входів
MX,
а
на
інформаційні
входи
подаються
константи
0
(якщо
данний
терм
у
функції
відсутній)
або
1 (якщо
він
присутній).
В
другому
випадку
процес
побудови
логічної
схеми
проводиться
за
результатами
розкладання
заданої
БФ.
Внаслідок
першого
кроку
розкладання
вихідної
БФ
по
по
g
змінним
одержуємо
сукупність
ОФ,
що
залежать
вже
тільки
від
n-g
змінних.
Наступні
кроки
розкладання
зменшують
кожний
раз
число
змінних
в
ЗФ
на
g,
аж
до
одержання
в
процесі
розкладання
ЗФ
тривіального
виду.
Таким
чином,
число
кроків
розкладання
БФ
відповідає
числу
каскадів
схеми
на
мультиплексорах
з
підключенням
на
управляючі
входи
MX
тих
змінних,
по
яких
здійснювалось
розкладання;
на
інформаційні
входи
MX
останнього
каскаду
подаються
окремі
змінні
![]() або
або
![]() ,
а
також
сигнали
логічного
0 чи
логічної
1, виходячи
з
виду
отриманих
ЗФ:
,
а
також
сигнали
логічного
0 чи
логічної
1, виходячи
з
виду
отриманих
ЗФ:
![]() Ǿ
Ǿ![]()
Згідно з приведеним вище алгоритмом здійснимо розкладання заданої БФ по двом, трьом та чотирьом змінним, зводячи результати розрахунків у таблиці.
Варіант
розкладання
БФ
по
двом
змінним
![]() наведені
у
наведені
у
99
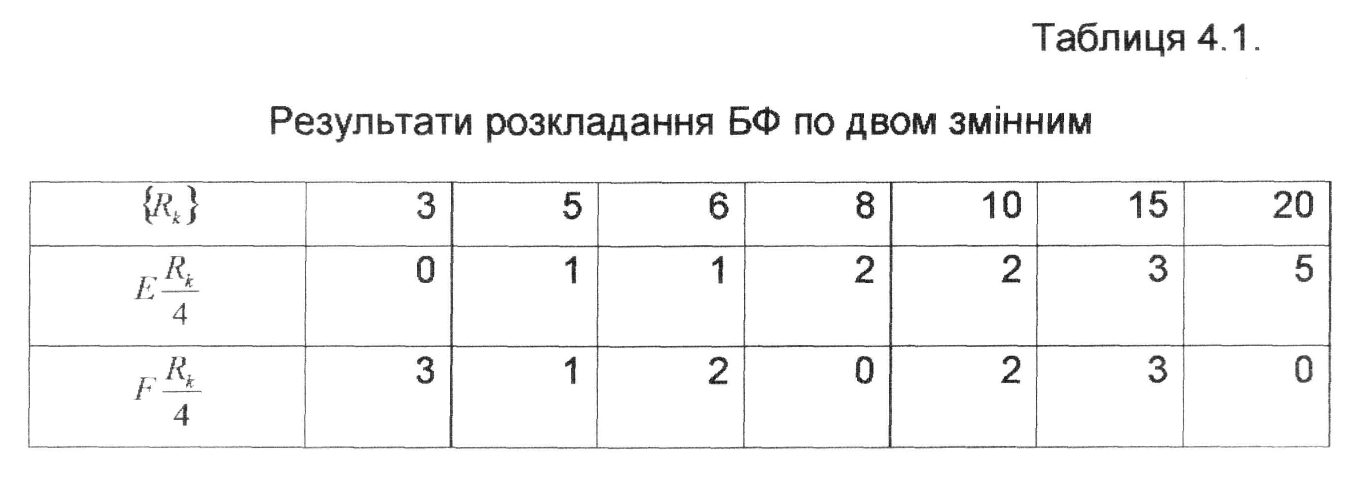
Таким чином, на першому кроці розкладання БФ одержуємо слідуючі ЗФ:
![]()
![]()
![]()
![]()
Розкладання БФ продовжимо, так як не всі ЗФ мають тривіальний вид.
На другому кроці у вигляді вихідних даних розглядаються складові кожної з одержаних на першому кроці розкладання залишкові функції Qt (табл.4.2.).
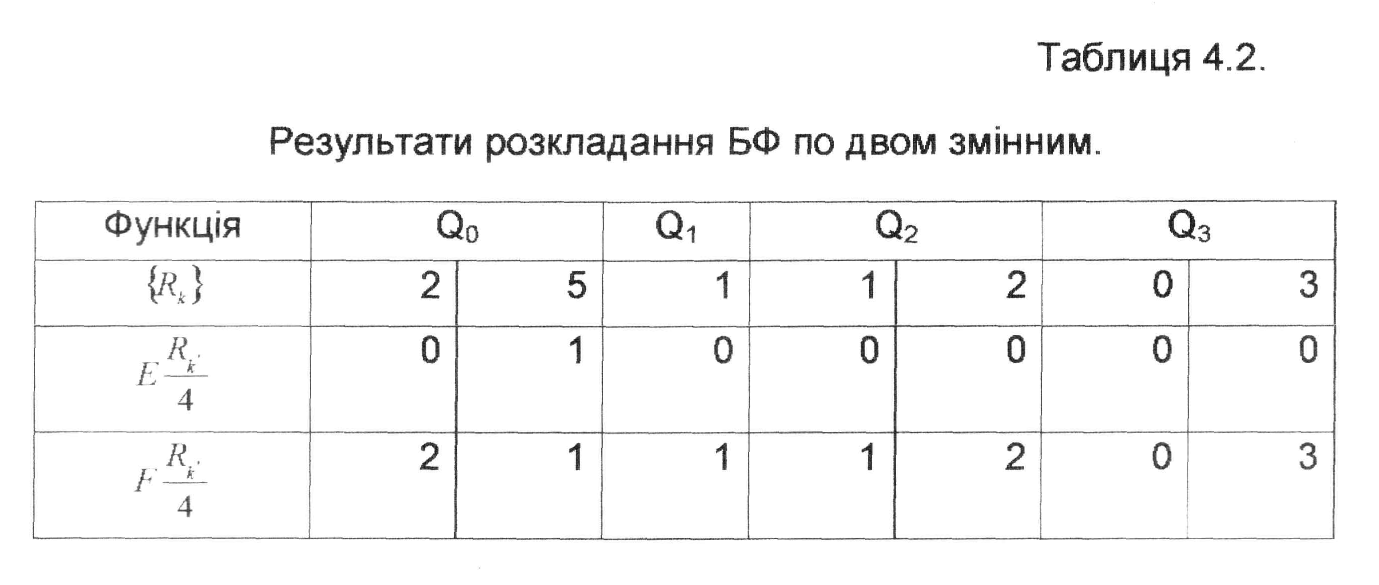
На другому кроці розкладання БФ маємо слідуючи ЗФ:
для
![]() Ǿ;
Ǿ;
![]()
![]()
![]()
для
![]() Ǿ;
Ǿ;
![]()
![]() Ǿ;
Ǿ;
![]() Ǿ;
Ǿ;
для
![]() Ǿ;
Ǿ;
Ǿ;
Ǿ;
для
![]()
![]() Ǿ;
Ǿ;
Ǿ;
Ǿ;
![]()
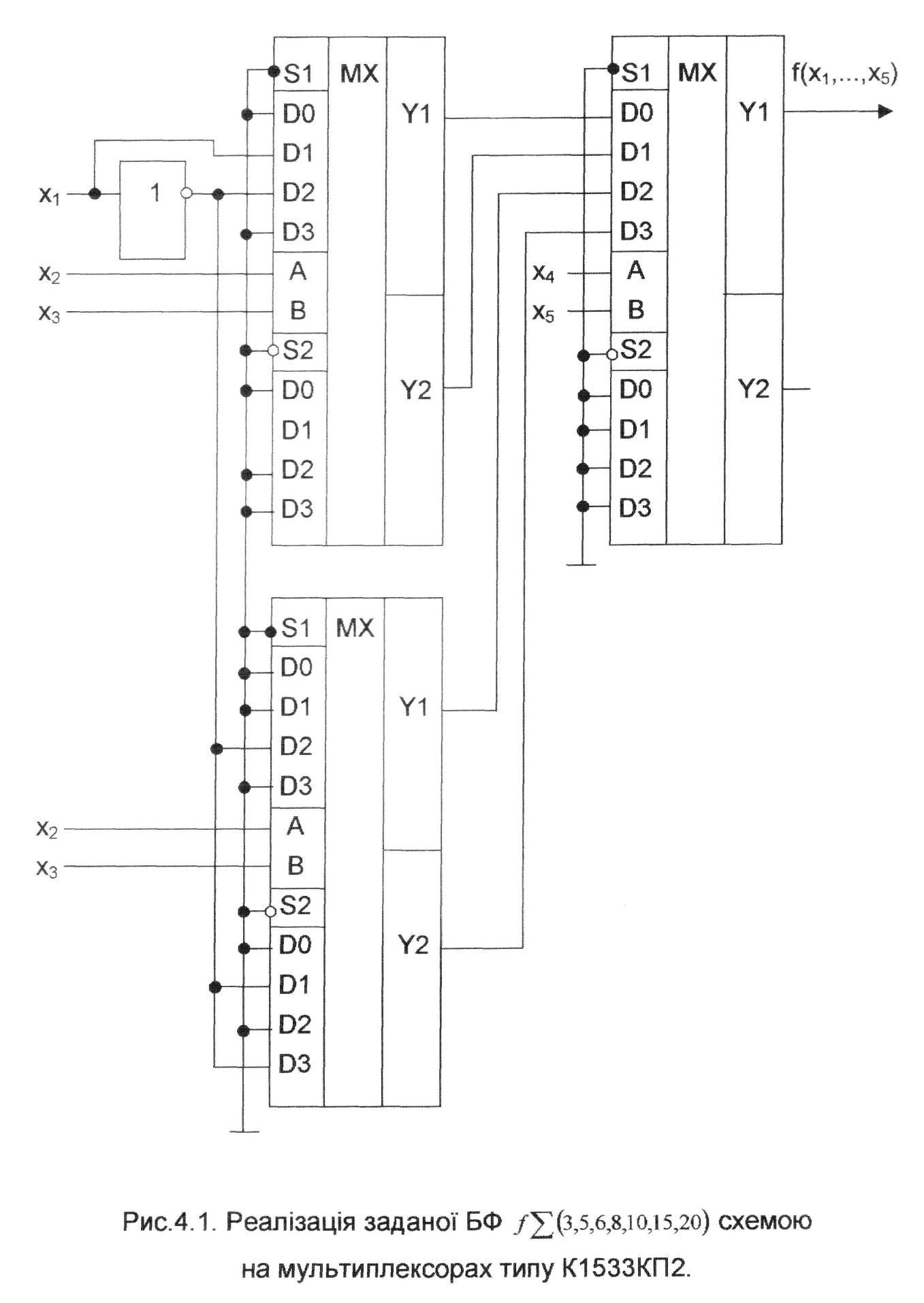
Так як ЗФ, отримані на другому кроці розкладання, є тривіальні, перевіримо до практичної реалізації двокаскадної схеми на MX з g=2. Схемна реалізація БФ на MX типу К1533КП2 наведена на рис.4.1.
Варіант розкладання БФ по трьом змінним наведено в табл.4.3.
100
101
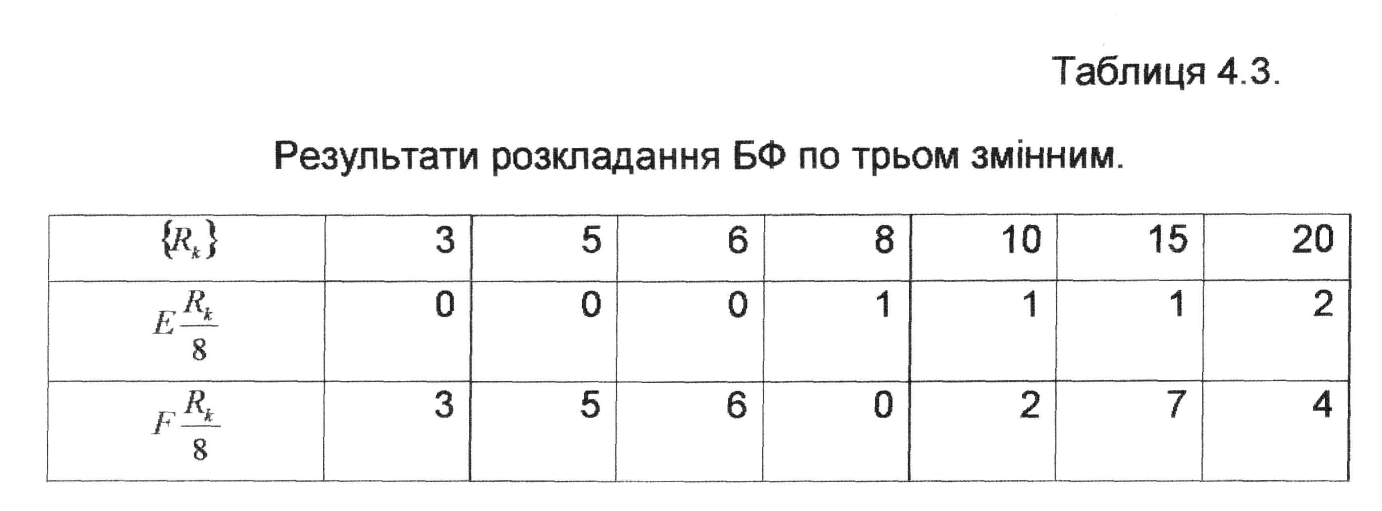
Таким чином, після першого розкладання по трьом змінним отримано наступні ЗФ:
![]()
![]() Ǿ;
Ǿ;
![]()
![]()
![]()
![]()
![]()
![]()
Оскільки одну частину ЗФ отримали тривіальною (Q0÷Q1,Q5÷Q7), a іншу (Q4) - нетривіальною, це свідчить про недоцільність подальшого розкладання БФ та її схемної реалізації (для остаточної реалізації БФ при такому підході потрібно вісім мультиплексорів).
Варіант
розкладання
БФ
по
чотирьом
змінним
![]() наведено
в
табл.4.4.
наведено
в
табл.4.4.
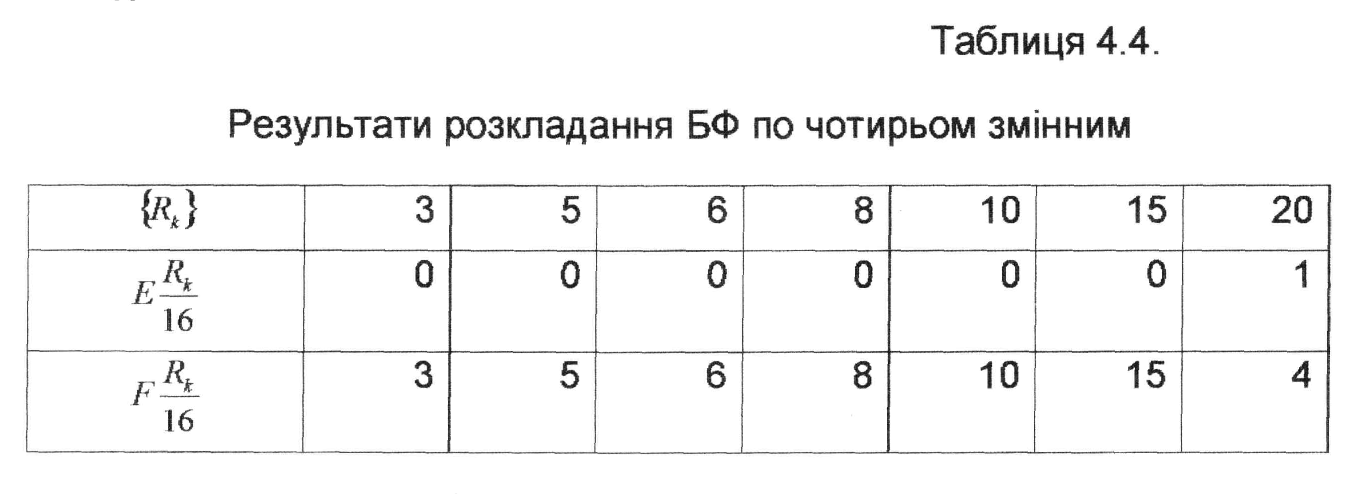
Таким чином, після першого кроку розкладання БФ по чотирьом змінним отримано слідуючі ЗФ:
Q0=Q1=Q2=Q7=Q9=Q12=Q13=Q14=Ǿ; Q3=Q5=Q6=Q8=Q10=Q15= Ǿ;
Q0=1.
102
103
Для реалізації на мультиплексорах краще всього підходять БФ з числом змінних кон'юнкцій до 9.