

МІНІСТЕРСТВО ОСВІТИ УКРАЇНИ
Вінницький державний технічний університет
ISBN
А.С.Васюра, С.ГКривогубченко, А.Я.Кулик, М.М.Компанець
ЕЛЕМЕНТИ
ЛОКАЛЬНИХ СИСТЕМ
АВТОМАТИКИ
Навчальний посібник для студентів спеціальності 7.091401
«Системи управління і автоматики»
Рекомендовано Міністерством освіти України
Вінниця ВДТУ 1999
ЗМІСТ
ВСТУП 4
1. ПРИНЦИПИ ЦИФРОВОГО УПРАВЛІННЯ
ТЕХНОЛОГІЧНИМИ ОБ'ЄКТАМИ 6
1.1. Класифікація та склад систем управління 6
1.2. Способи управління технологічними об'єктами 12
1.3. Методи вибору періода квантування 18
1.4. Типові алгоритми БЦУ 22
Питання для самоконтролю 26
Рекомендована література 26
2. ЗАСОБИ СПРЯЖЕННЯ З ОБ'ЄКТОМ , 27
2.1. Технологічні процеси як об'єкти управління 27
2.2. Пристрої отримання інформації 33
2.3. Перетворення вихідних сигналів датчиків 38
2.4. Аналого-цифрові та цифро-аналогові перетворювачі 52
Питання для самоконтролю 59
Рекомендована література 59
3. МП ЗАСОБИ СИСТЕМ УПРАВЛІННЯ 61
3.1. Інтерфейси систем управління 61
3.2. Організація паралельного інтерфейсу 68
3.3. Організація послідовного інтерфейсу 74
3.4. Елементи, що задають час 80
3.5. Організація режиму переривання 85
3.6. Елементи захисту інформації 90
Питання для самоконтролю 94
Рекомендована література 95
4. СИНТЕЗ СИСТЕМ ЛОГІЧНОГО УПРАВЛІННЯ 96
Питання для самоконтролю 103
Рекомендована література 103
ВСТУП
Автоматизація технологічних процесів на основі застосування автоматизованих станків, машин та механізмів, робото-технічних комплексів, сучасних засобів автоматики та обчислювальної техніки складає один з головних напрямків науково-технічного прогресу в усіх галузях народного господарства. Вирішення задач автоматизації в теперішній час неможливо без застосування досягнень мікроелектроніки, яка забезпечує випуск елементної бази для пристроїв автоматики та систем управління в цілому.
Створення засобів вимірювання, контролю та управління обладнанням і технологічними процесами характеризується переходом від вирішення окремих, відносно простих задач автоматизації (наприклад, виключення ручних операцій оператора) до створення на основі мікропроцесорних ВІС та іншої мікроелектронної елементної бази пристроїв автоматики з програмним управлінням, які забезпечують автоматичний режим роботи як автономно, так і в складі автоматизованих систем, вирішуючих складні функціональні задачі контролю та управління при великому обсязі інформації.
Сучасні мікропроцесорні комплекси ВІС, ВІС запам'ятовуючих пристроїв, АЦП, ЦАП, операційні підсилювачі, мультиплексори, інтерфейси, чутливі елементи та інші подібні пристрої дозволяють створювати обладнання, яке в порівнянні з попереднім поколінням обладають більшими надійністю та функціональними можливостями, точністю, більш високим ступенем уніфікації, адаптації, можливістю нарощення систем як по засобам вимірювання і контролю, так і по управління.
Важливість поставленої задачі по автоматизації усіх галузей народного господарства визначає необхідність значного підвищення рівня знань студентів в області проектування, конструювання та використання мікроелектронних пристроїв автоматики. В зв'язку з цим являється доцільним систематизувати та узагальнити в окремому навчальному посібнику матеріали по основам теорії цифрового управління технологічними процесами, методам синтезу різноманітних
систем управління, МП комплексів ВІС та інших електронних засобів для створення різноманітних пристроїв та систем автоматики. Викладені в посібнику відомості призначені для курсу «Локальні системи автоматики».
Вступ, розділ 1, § 3.6. написані А.С.Васюрою. Розділ 2 -М.М.Компанцем. Розділ 3 - А.Я.Куликом. Розділ 4, § 3.6. -С. Г. Кривогубченко.
1. Принципи цифрового управління технологічними об'єктами
1.1. Класифікація та склад систем управління
В загальному випадку будь-яка система (технічна, біологічна, економічна, соціальна і т.д.) являє собою множину взаємопов'язаних елементів. В автоматиці система являє собою сукупність об'єкті! управління та управляючого пристрою, що взаємодіють між собою. У сфері промислового виробництва для теперішнього часу практичний інтерес представляють системи управління трьох категорій: локальні, централізовані та автоматизовані системи управління Технологічними процесами. До першої категорії систем автоматики відносяться чисельні локальні (місцеві) засоби контролю, регулювання та управління. Ці системи знаходять широке застосування на добре вивчених «простих» об'єктах управління з числом вимірювальних величин не перевищуючих десятка, наприклад, для котельних установок малої потужності, кондиціонерів, холодильних агрегатів та інших об'єктів. Вони ефективні при автоматизації технологічно незалежних об'єктів з компактним розташуванням основного обладнання та нескладними цілями управління (стабілізації, слідкування, програмного та логічного управління, контролю та вимірювання) при добре відпрацьованій технології та стаціонарних умовах експлуатації.
Поява систем автоматики другої категорії пов'язано з ростом кількості контрольованих параметрів, з територіальною розосередженістю об'єктів управління. Вони дозволяють реалізувати нові функції: функції по обчисленню комплексних показників ефективності роботи окремих агрегатів та техніко-економічних показників всього технологічного процесу, обчисленню на цій основі оптимальних управляючих дій та реалізації цих дій або у вигляді уставок локальних регуляторів, або у вигляді безпосередньої дії на виконавчий пристрій.
Більш високі вимоги до якості управління не тільки за рахунок підвищення кількості контролюючих параметрів, а також здійснення
6
більш точного та комплексного контролю, який містить контроль сировини та проміжних продуктів і необхідність оптимального управління об'єктами на основі їх математичної моделі, створили передумови до використання систем третьої категорії - АСУТП. В цих системах об'єднуються рішення задач контролю та регулювання технологічних процесів, вибору оптимальних режимів та алгоритмів управління.
Не дивлячись на уявну різноманітність систем управління, загальним для них є наявність слідуючих елементів: об'єкта управління, пристрою управління, пристроїв зв'язку з об'єктом, отримання та використання інформації.
Типова структура системи управління наведена на рис. 1.1. Зображені на ній апаратні засоби, які складають систему, уявно можна поділити на слідуючі основні частини:
• пристрій управління (ПУ);
• пристрій зв'язку з об'єктом (ПЗО);
• периферійні пристрої (датчики (Д), та виконавчі органи (ВО)).
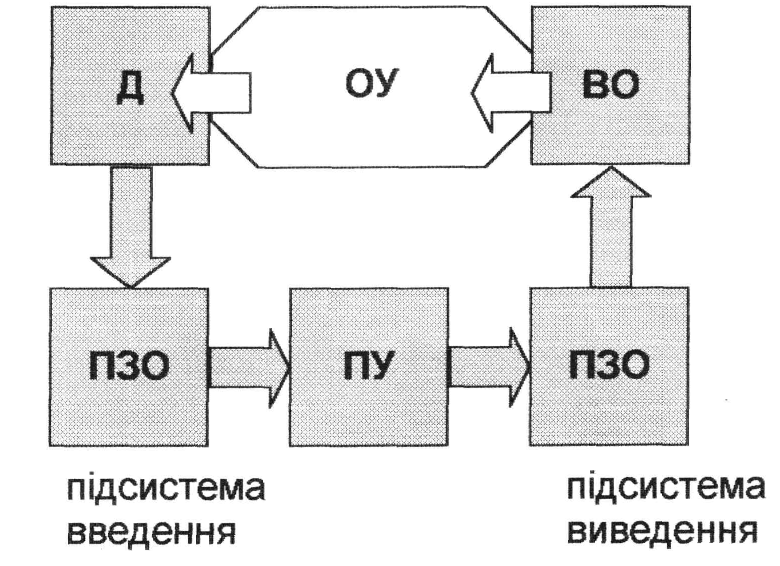
Рис. 1.1 Структурна схема системи управління.
Пристрої, які забезпечують можливість підключення управляючого пристрою до об'єкту управління (ОУ), виділяють в спеціальний клас периферійних пристроїв - пристрої зв'язку з об'єктом. В загальному випадку (ПЗО) містить в собі підсистеми аналогового та цифрового введення, підсистеми аналогового та цифрового виведення.
7
Підсистема аналогового введення перетворює аналогові фізичні величини в форму, придатну для використання в пристрої управління. За допомогою відповідних датчиків аналогові величини різної фізичної природи перетворюються в більшості випадків в постійний струм або напругу.
Основними функціями обладнання підсистеми є:
• нормалізація та підсилення сигналу, фільтрація, послаблення, зміщення рівня, перетворення та ін.;
• комутація сигналів;
• аналого-цифрове перетворення. Різноманітні вимоги по вартості та технічним характеристикам
знаходять можливість варіації структури підсистеми аналогового введення на підставі вибору метод а обробки аналогових сигналів.
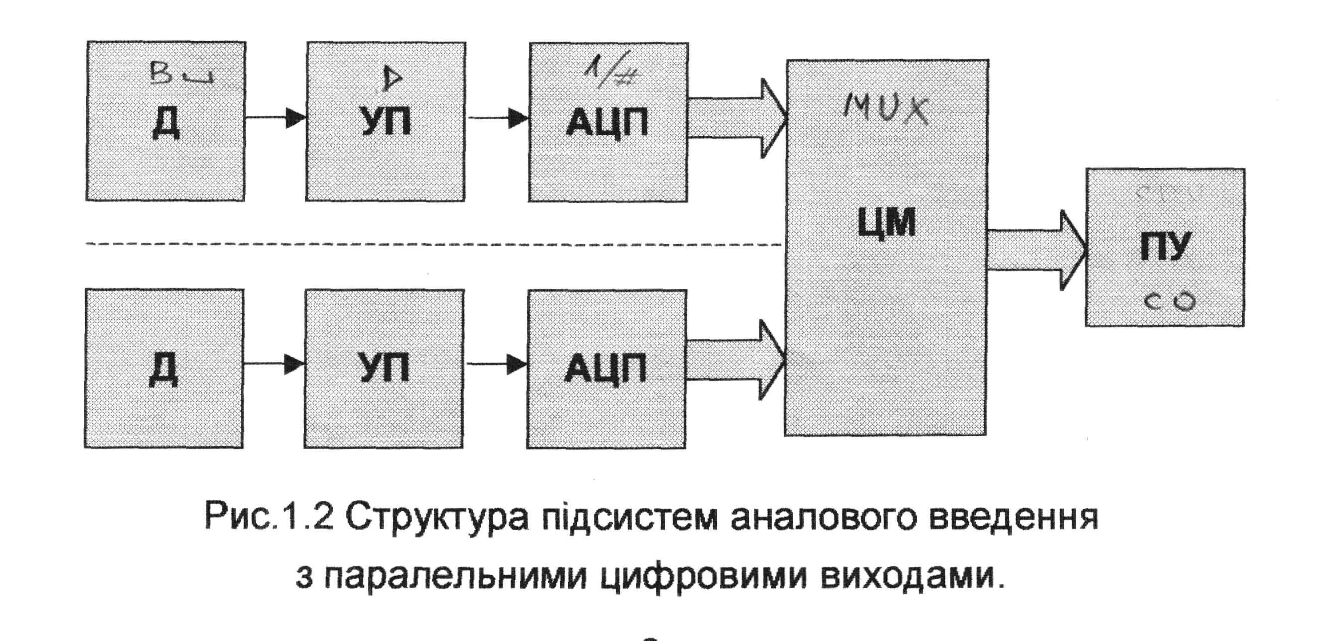
На рис. 1.2. наведена структура яка реалізує принцип паралельної обробки аналогових сигналів, які надходять від датчиків. Дана структура дозволяє забезпечити максимальну продуктивність апаратури усіх каналів підсистеми внаслідок незалежності обробки кожного сигналу та високу якість перетворення сигналів внаслідок можливості підсистеми по забезпеченню потрібного рівня сигналу на вході АЦП в кожному каналі. Такий варіант побудови підсистем має велике майбутнє, але на сучасному етапі розвитку мікросхемотехніки при його реалізації має місце більш висока вартість внаслідок порівняно високої вартості інтегральних схем АЦП.
8
Інші варіанти побудови структури підсистем аналогового введення базуються на принципі послідовної обробки аналогових сигналів та перенесення мультиплексування з цифрової в аналогову область, а також застосування аналогових схем виборки-зберігання для фіксації аналогових сигналів на вході АЦП. Це дає можливість використовувати тільки один АЦП незалежно від кількості аналогових входів.
Високі технічні характеристики притаманні структурі, наведеній на рис. 1.3.
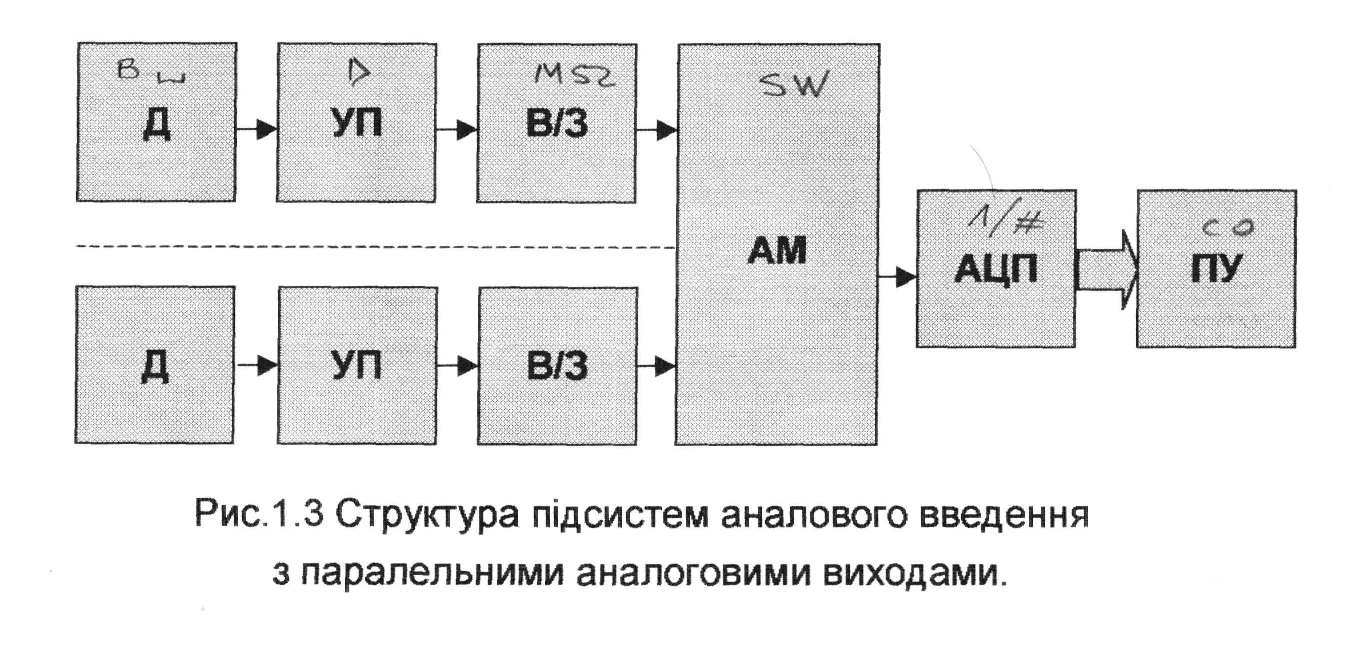
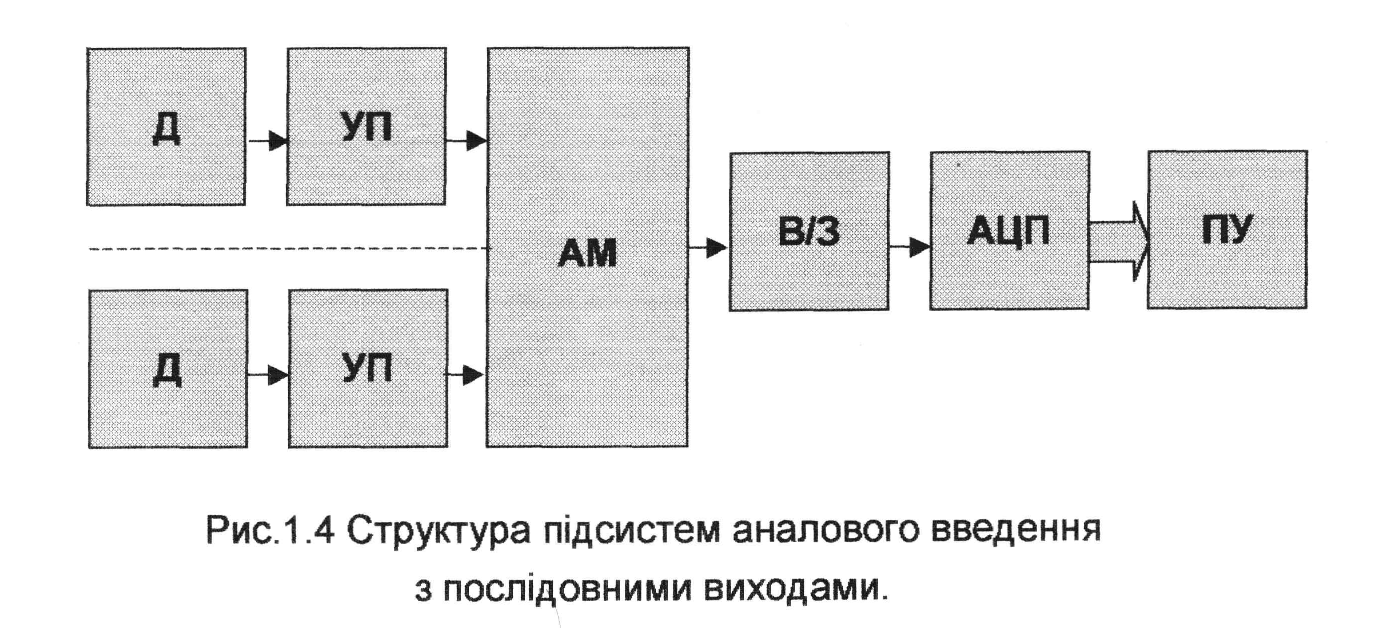
Добра якість перетворення забезпечена тими ж функціональними блоками, які були включені в склад структури, наведеної на рис.1.2. Продуктивність даної структури знаходиться у прямій залежності від швидкодії АЦП та обмежена його динамічними параметрами, тому в таких підсистемах необхідно використовувати швидкодією. Використання додаткових елементів для обробки аналогових сигналів мультиплексорів, схем виробки-зберігання погіршує точністні характеристики підсистеми у цілому. Практично ідентичними технічними характеристиками у порівнянні зі структурою, наведеною на рис.1.3., володіє підсистема наведена на рис.1.4.
Апаратні витрати для реалізації підсистеми на основі структури, наведеної на рис.1.3, більші у порівнянні з витратами для побудови структури з однією схемою виборки-зберігання. Цю конфігурацію структури найбільш раціонально використовувати
однократних подій.
9
Найпростішою, але яка забезпечує відносно низьку якість перетворення, є підсистема, побудована по структурі, наведеній на рис. 1.5.
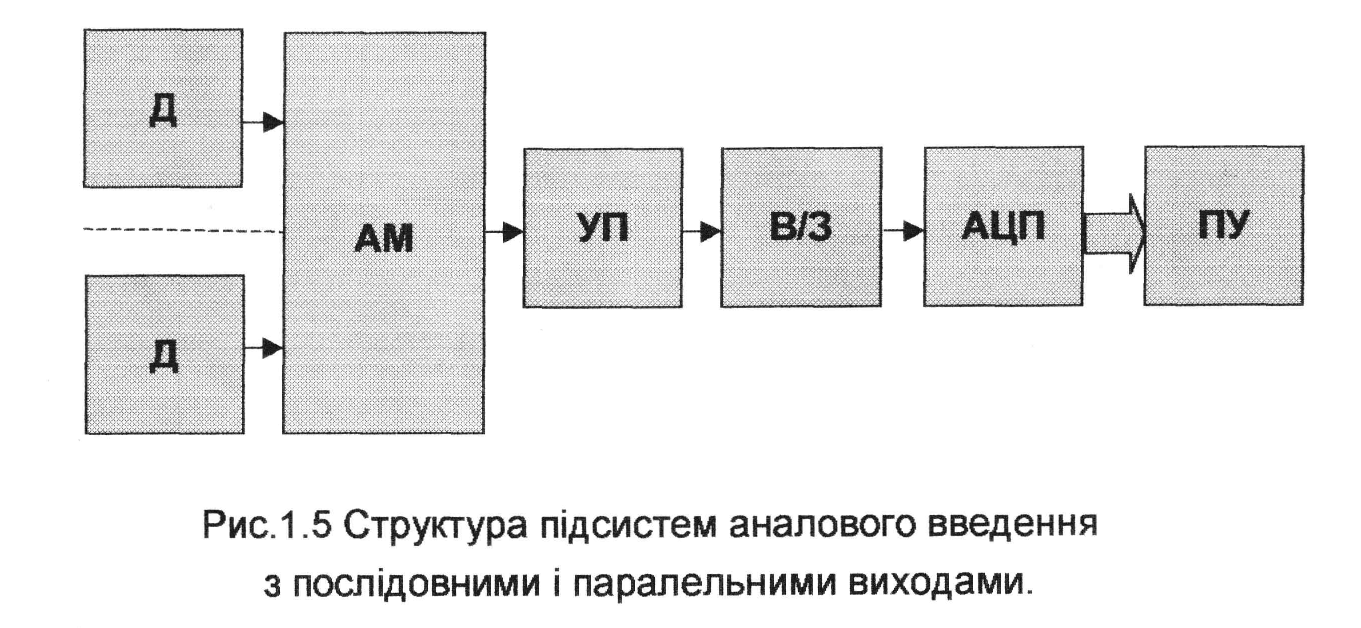
Ця конфігурація структури раціональна при умові існування сигналів високого рівня, які надходять з датчиків, та ідентичності усіх аналогових сигналів, у цьому випадку можливо забезпечити необхідну якість перетворення, зберігаючи переваги простоти реалізації.
З аналізу можливих варіантів побудови структур випливає, що будь-який варіант реалізується на основі функціональних пристроїв: датчик, узгоджуючий пристрій, АЦП, цифрові мультиплексори, аналогові мультиплексори, пристрої виборки-зберігання.
10
Підсистема аналогового виведення в багатьох рисах схожа на підсистему аналогового введення і використовується для подання на об’єкт контролю сигналів у вигляді напруги або струму, які змінюються в часі по заданому закону. Претворення цифрових вихідних даних в аналоговий сигнал за допомогою ЦАП.
Виділяють дві конфігурації підсистеми аналогового виведення:
• з цифро-аналоговим перетворювачем в кожному каналі;
• з одним ЦАП, який працює у режимі розподілу часу.
Перша конфігурація застосовується там, де є потреба у високій швидкості та точності. Друга конфігурація менш коштовна, тому що застосовується тільки один ЦАП. У цьому випадку підсистема повинна вміщувати ряд вихідних схем аналогової пам’яті.
Підсистема цифрового введення-виведення. Для систем автоматики характерні не тільки аналогові вхідні і вихідні величини, але й величини, які є по своїй природі цифровими, тобто можуть бути представлені двома станами, наприклад, "увімкнено" або "вимкнено", "в межах" або "за межами", "низький рівень" або "високий рівень". Крім цифрових параметрів, що характеризують стан об’єкту, існують вихідні цифрові параметри, які задають бажаний стан об’єкту. Наприклад, при контролі об'єкту часто виникає необхідність увімкнення або вимкнення блоків та модулів, що його складають, або подання на об'єкт контролю комбінації цифрових сигналів.
У якості перетворюючих схем вхідних сигналів використовують резистивні подільники напруги, діодні обмежувачі, компаратори, тригери Шмітта, узгоджувачі рівнів.
Основна функція підсистеми цифрового виведення – функція ключа. Вибір типу ключа визначається значенням потужності, що комутується, та швидкості переключення. Електромеханічні реле використовують в основному для управління середньою та великою потужністю при низьких швидкостях переключення. Вони забезпечують повну гальванічну розв'язку кіл.
Більш надійні - напівпровідникові ключі.
11
Для комутації кіл змінного струму середньої та великої потужності часто використовуються кремнієві випрямувачі, які управляються. Практично досконалими перемикаючими характеристиками володіють польові транзистори. Для гальванічної розв'язки напівпровідникових ключів використовують оптоелектронні пари.