

1 Конструкции измерительных механизмов приборов различных систем
Измерительным прибором называется средство измерений, предназначенное для выработки сигнала измерительной информации в форме, доступной для непосредственного восприятия наблюдателем.
Измерительная информация – это информация о значениях измеряемых величин.
Большинство используемых сегодня в технологических процессах стационарных приборов – это классические аналоговые электромеханические приборы. Их метрологические и эксплуатационные характеристики вполне достаточны для решения основных задач технических измерений. Наиболее широко распространены электромеханические вольтметры, амперметры, омметры, фазометры, ваттметры, счетчики активной и реактивной энергии. В электромеханических измерительных приборах реализованы различные физические принципы, позволяющие преобразовать значение измеряемой величины в пропорциональное отклонение указателя (стрелки).
Из всего разнообразия конструкций и схем электромеханических приборов рассмотрим некоторые наиболее распространенные. Эти устройства лежат в основе измерителей самых различных электрических и неэлектрических величин.
Измерительные механизмы делятся:
а) Магнитоэлектрическая система
Принцип действия приборов магнитоэлектрической системы основан на взаимодействие поля постоянного магнита с током, протекающим по рамке (катушке), помещенным в поле этого магнита.
Вращающий момент подвижной части прибора равен:
 (1.1)
(1.1)
Противодействующий момент прибора равен:
 (1.2)
(1.2)
Условие равновесия системы:
 (1.3)
(1.3)
Запишем формулу 1.3 с учетом формул 1.1 и 1.2:
 (1.4)
(1.4)
Угол поворота подвижной части прибора равен:
 (1.5)
(1.5)
На рисунке 1.1 изображена одна из возможных конструкций устройства приборов магнитоэлектрической системы, а также ее условное графическое обозначение, наносимое на шкалу прибора для его идентификации.
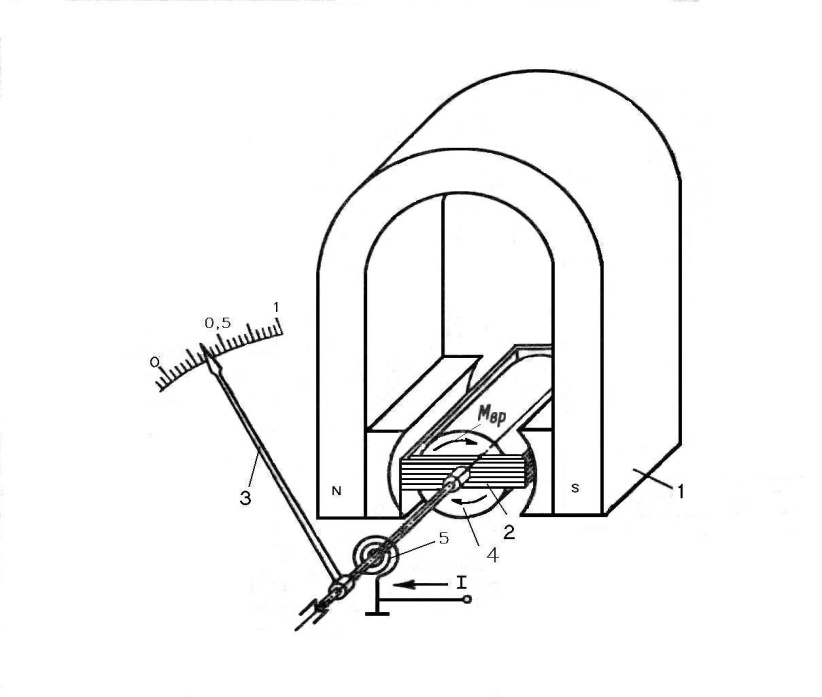
Условное обозначение прибора

Рисунок 1.1 - Устройство прибора магнитоэлектрической системы
б) Электромагнитная система
Принцип действия приборов электромагнитной системы основан на взаимодействие магнитного поля создаваемого током в неподвижной катушке с подвижным ферримагнитным сердечником выполненным в виде лепестка насаженного на ось прибора.
Вращающий момент подвижной части прибора равен:
 (1.6)
(1.6)
Противодействующий момент прибора равен:
Условие равновесия системы:
 (1.7)
(1.7)
Угол поворота подвижной части прибора равен:
 (1.8)
(1.8)
На рисунке 1.2 изображена одна из возможных конструкций устройства приборов электромагнитной системы, а также ее условное графическое обозначение, наносимое на шкалу прибора для его идентификации.
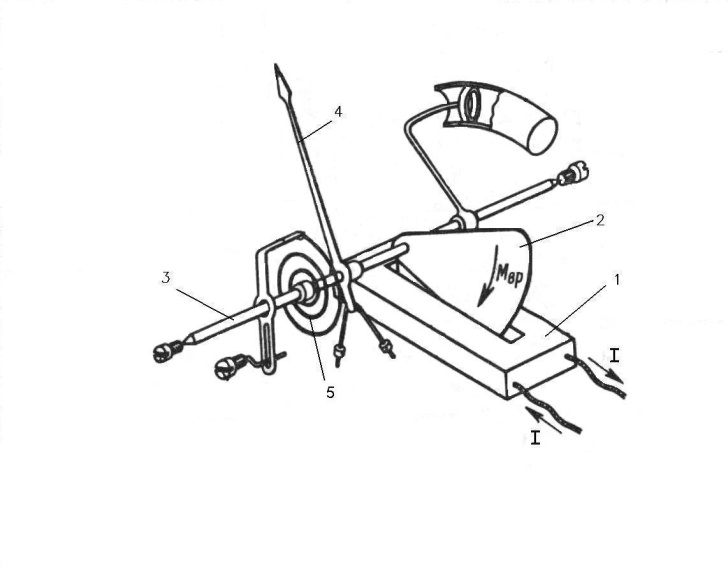
Условное обозначение
прибора
0
Условное обозначение прибора




















Рисунок 1.2 - Устройство прибора электромагнитной системы
в) Электродинамическая система
Принцип действия приборов электродинамической системы основан на взаимодействие двух катушек по которым протекает ток, одна из катушек подвижна, а другая не подвижна.
Вращающий момент подвижной части прибора равен:
 (1.9)
(1.9)
Противодействующий момент прибора равен:
Условие равновесия системы:

 (1.10)
(1.10)
Угол поворота подвижной части прибора равен:
 (1.11)
(1.11)
На рисунке 1.3 изображена одна из возможных конструкций устройства приборов электродинамической системы, а также ее условное графическое обозначение, наносимое на шкалу прибора для его идентификации.
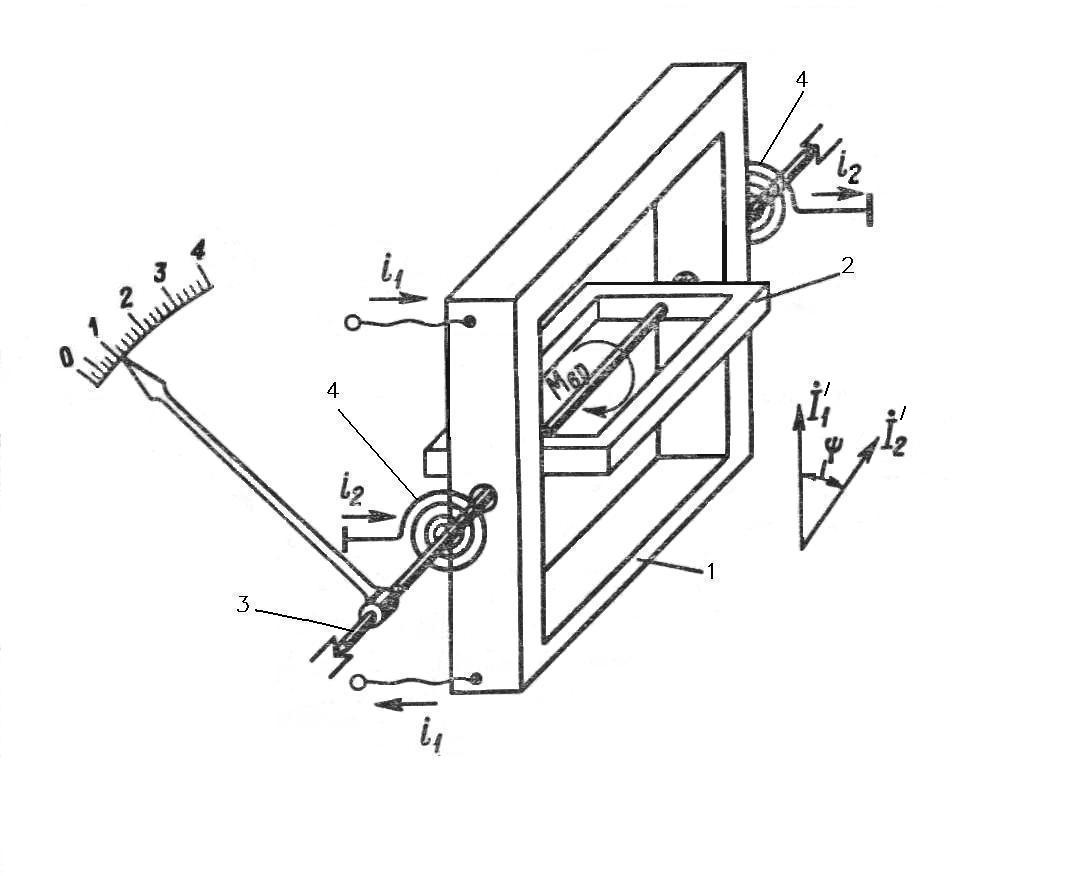
Условное обозначение
прибора
0

Рисунок 1.3 - Устройство прибора электродинамической системы
г) Ферродинамическая система
Приборы ферродинамической системы являются разновидностью электродинамических приборов, у которых неподвижная катушка намотана на магнитопровод, изготовленный из листовой электротехнической стали. Конструкции данных приборов конструктивно похожи на магнитоэлектрические приборы.
Вращающий момент подвижной части прибора равен:
 (1.12)
(1.12)
Противодействующий момент прибора равен:
Условие равновесия системы:
 (1.13)
(1.13)
Угол поворота подвижной части прибора равен:
 (1.14)
(1.14)
На рисунке 1.4 изображена одна из возможных конструкций устройства приборов ферродинамической системы, а также ее условное графическое обозначение, наносимое на шкалу прибора для его идентификации.