

Процессы управления в автоколебательных системах


 (6.29)
(6.29)
 —медленная
переменная по сравнению с x*(t)
—медленная
переменная по сравнению с x*(t)
Уравнение динамики системы (рис. 6.1) имеет вид
Q(p)x + R(p)F(x) = S(p)f(t) (6.30)
где f(t) — медленная функция времени (по сравнению с х*).
 (6.31)
(6.31)
 (6.32)
(6.32)
Уравнение для периодических составляющих запишется в виде
 (6.33)
(6.33)
(6.34)
 (6.35)
(6.35)

 (6.37)
(6.37)
 ,
(6.38)
,
(6.38)
 (6.39)
(6.39)
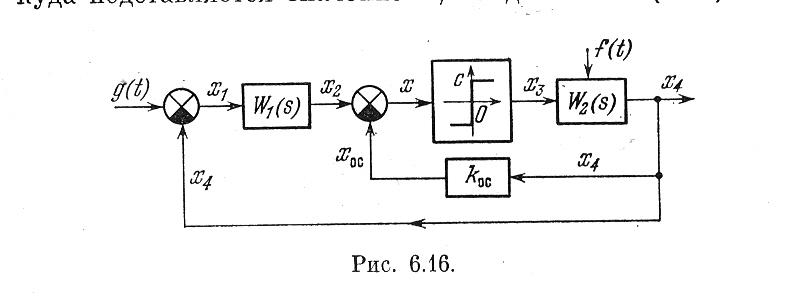
Рис. 6.16.
Колебательные переходные процессы
Уравнение нелинейной системы (рис. 6.20), как известно, имеет вид
Q(p)x + R(p)F(x) = 0 (6.45)
В линейных системах синусоидальные переходные колебания имели вид

 (6.46)
(6.46)
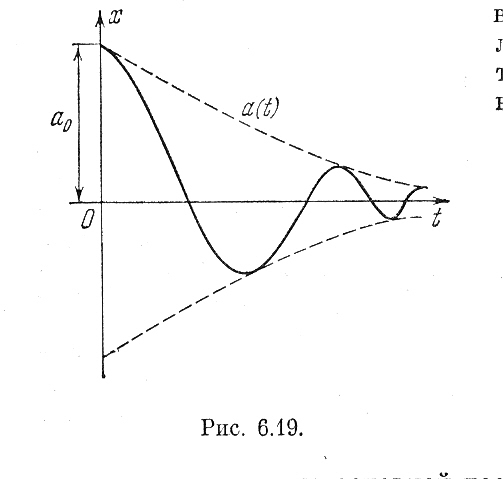
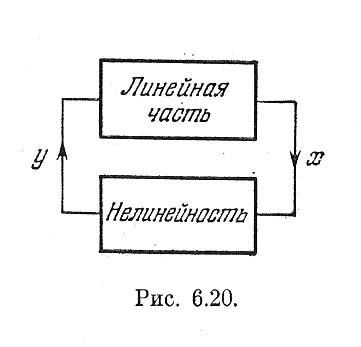
Рис, 6.19. Рис. 6.20.


 (6.47)
(6.47)
X = asinψ, px = αωcosψ + αξsinψ
 ,
,
 (6.48)
(6.48)
 (6.49)
(6.49)
X(α, ω, ξ) =0 Y(α, ω, ξ) = 0 (6.51)
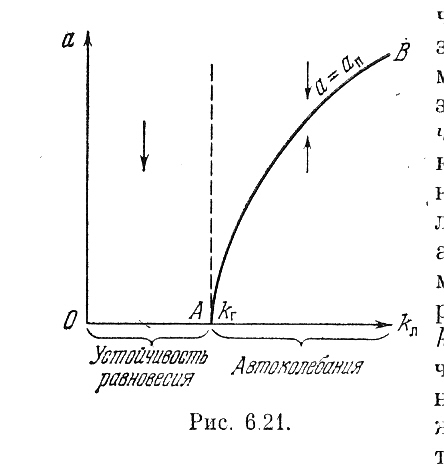
Рис.6.21
 (6.52)
(6.52)
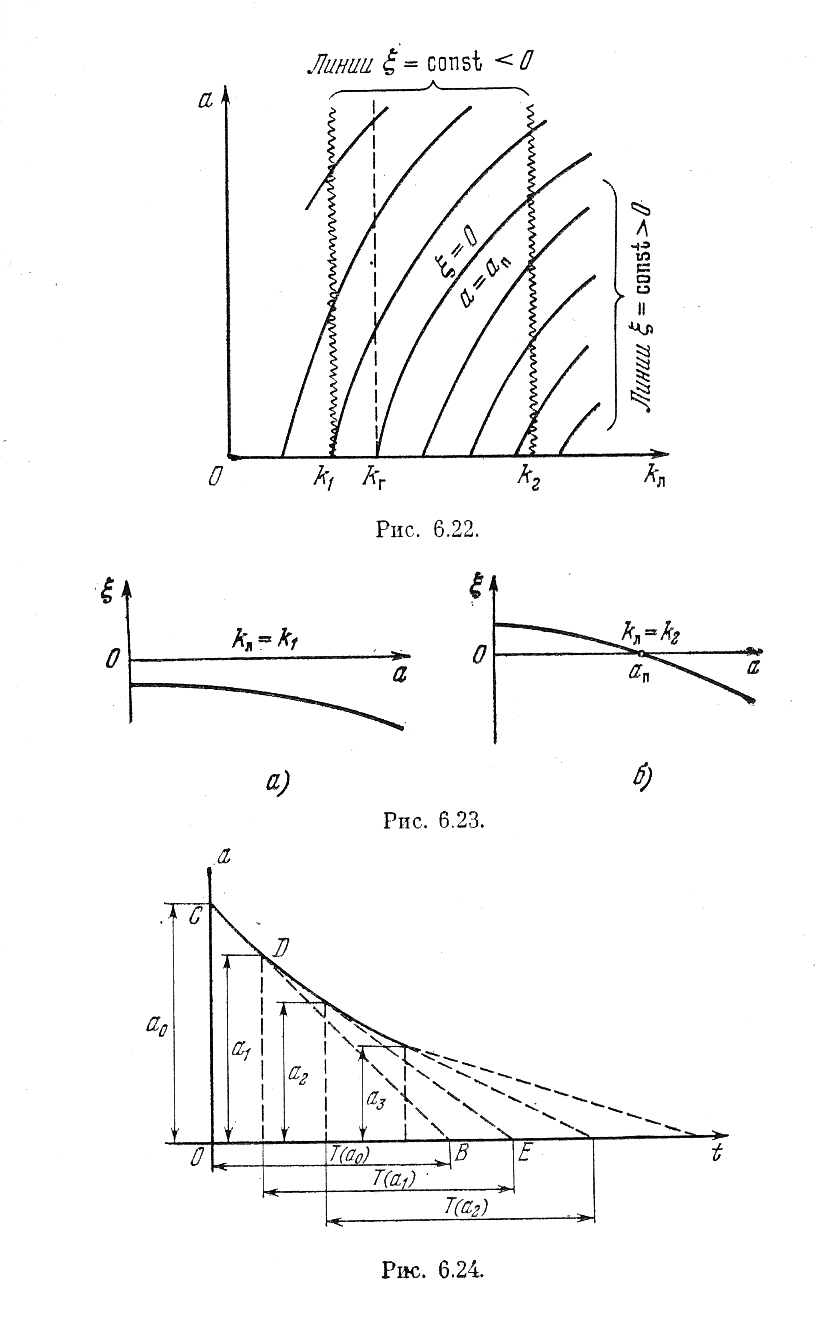
Рис.6.22.
Рис.6.23
Рис.6.24.
Введем в рассмотрение текущую «постоянную времени»
 (6.53)
(6.53)
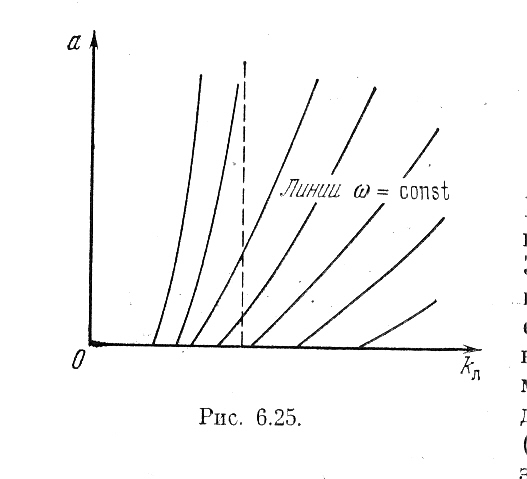
Рис.6.25
Гармоническая линеаризация нелинейности дает
F(x)
= q(α)x

Характеристическое уравнение замкнутой системы в результате получает вид

Подставляя в это уравнение λ = ξ +jω, ищем решение в форме (6.47).

Рис. 6.26.
Рис. 6.27
Выделив вещественную и мнимую части, получим два уравнения (6.51) в виде


Из второго уравнения с учетом значения q(α) находим
 (6.54)
(6.54)
а из первого
 (6.55)
(6.55)
где

По формулам (6.54) и (6.55) построены диаграммы качества нелинейных колебательных переходных процессов в виде линий ξ = const и ω = const по параметру k1 на рис. 6.27 и по параметру koc — на рис. 6.28
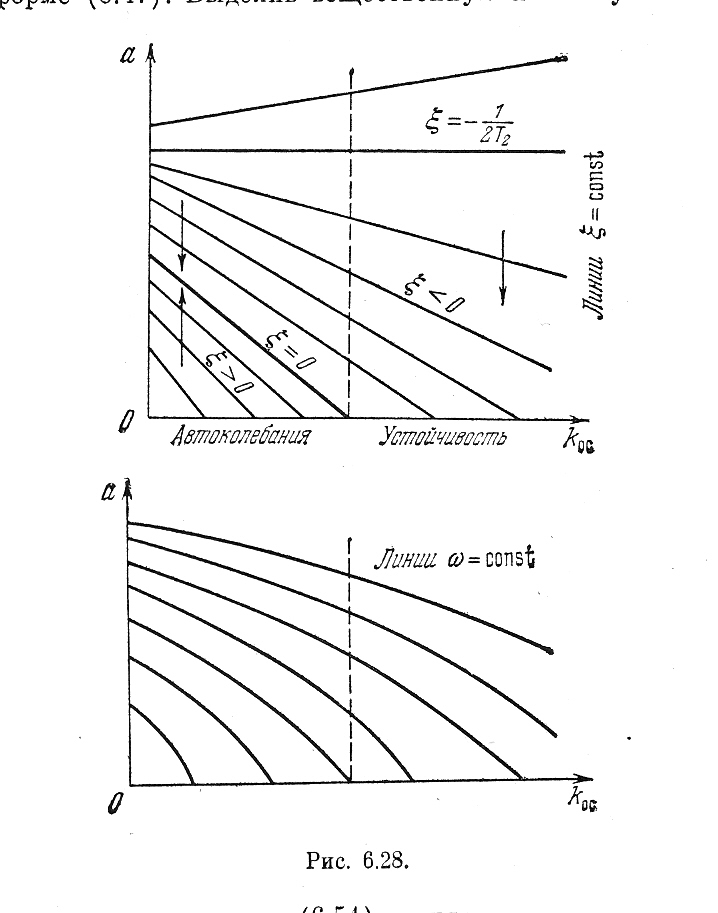
Рис. 6.28
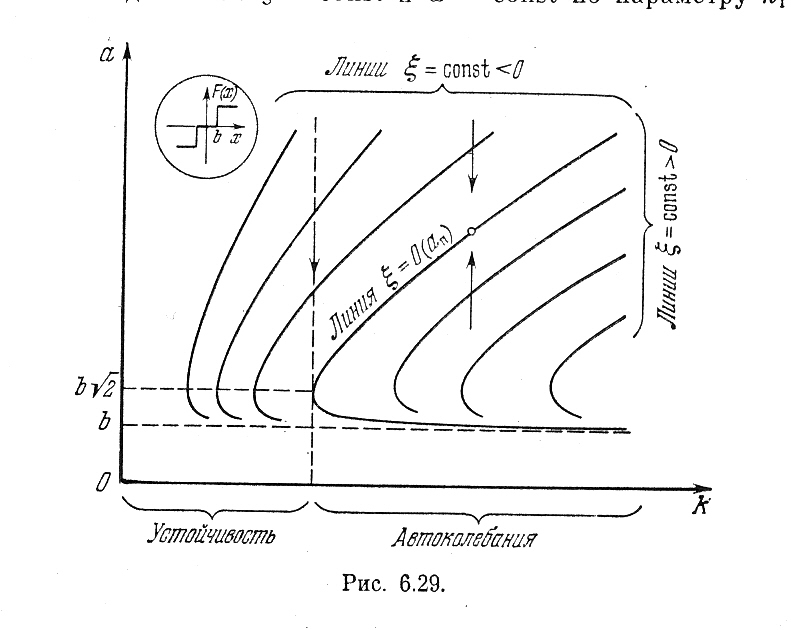
Рис. 6.29
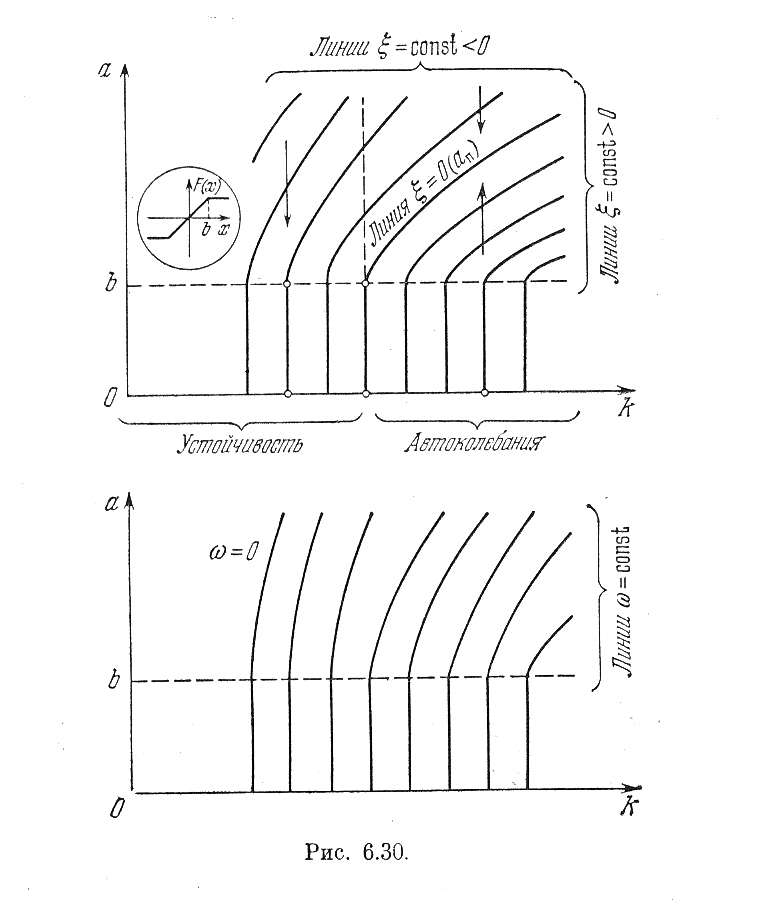
Рис.6.30
Нелинейная характеристика F(x) расположена в секторе [0, km] (рис. 6.31, б) и может иметь произвольное очертание. Данный способ оценки быстроты затухания
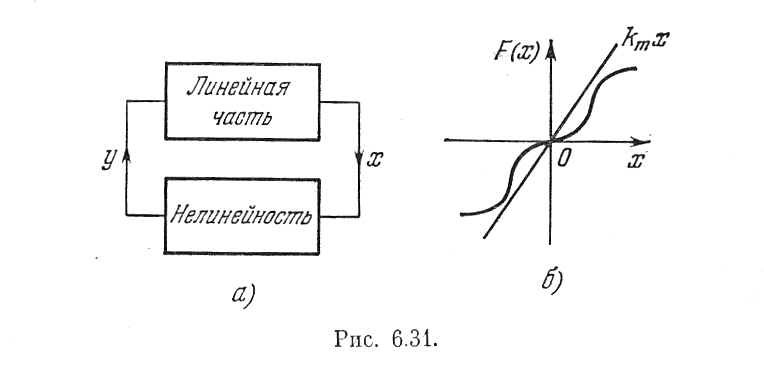
Рис 6.31
На комплексной плоскости вместо модифицированной (5.48) строится смещенная частотная характеристика, определяемая следующим образом:
 (6.56)
(6.56)
где


Можно определить предельное значение km, при котором в системе имеет место показатель затухания, не меньше , как показано на рис. 6.33.
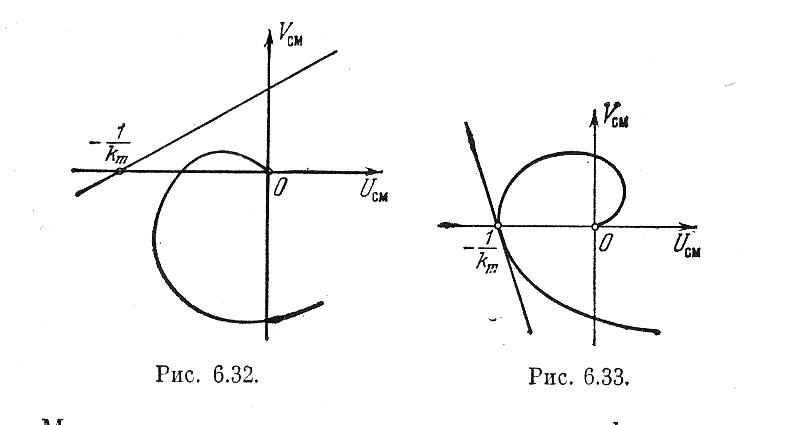
Рис.6.32 Рис.6.33
Если построить серию смещенных частотных характеристик для разных значений ξ, то получим зависимость ξ (km), т. е. зависимость показателя затухания от размера сектора, в котором лежит нелинейная характеристика.