§1.6. Основные законы управления
Под законом управления в автоматике понимают математическую зависимость, по которой управляющее устройство или регулятор воздействует на объект управления. В автоматике будут рассмотрены только простейшие законы управления, в которых управляющие воздействия линейно зависят от отклонения от его интеграла и дифференциала.
Пропорциональный закон (П-закон).
Это закон реализуется пропорциональным регулятором (П-регулятором). П-регулятор реализует статическое регулирование. Рассматриваемы законы регулирования реализуются при помощи автоматических устройств или регуляторов, на вход которых подается отклонение управляемой величины (сигнал рассогласования), а на выходе формируется управляющее воздействие.
Уравнение П-закона имеет вид:
![]() 1.1
1.1
где кр - коэффициент передачи регулятора (коэффициент усиления регулятора).
U(t) – управляющее воздействие (формируется на выходе регулятора).
(t) – отклонение управляемой (регулируемой) величины от заданного значения (поступает на вход регулятора).
Интегральный закон (И-закон).
Рассматриваемый закон реализуется И-регулятором в процессе астатического регулирования. Уравнение закона:
![]() 1.2
1.2
![]() 1.3
1.3
где кр – коэффициент передачи И-регулятора
Ти – постоянная времени интегрирования И-регулятора
Пропорционально-интегральный закон (ПИ-закон)
Данный закон регулируется ПИ-регулятором, т.е. происходит пропорциональное регулирование с интегральной коррекцией. Регулирование в данном случае является астатическим. Выражение ПИ-закона:
![]() 1.4
1.4
![]() 1.5
1.5
Пропорционально-интегрально-дифференциальный закон (ПИД-закон).
Данный закон регулируется ПИД-регулятором, а само регулирование является астатическим. Выражение этого закона:
![]() 1 1.6
1 1.6
где Ти; Тд – постоянные времени интегрирования и дифференцирования ПИД-регулятора.
Графики поведения управления управляемой величины во времени, при участии в системе различных регуляторов. Рассматриваемый ОУ обладает свойством саморегулирования.
1 – система самовыравнивания без регулирования.
2 – система с П-регулятором.
3 – система с И-регулятором.
4 – система с ПИ-регулятором.
5 – система с ПИД-регулятором.
§1.7. Принципы действия систем автоматического управления.
При проектировании САУ решают, как наиболее простым и технико-обоснованным способом получить и передать необходимый объем информации. Для этого исследуют принципы построения систем. Основными принципами построения систем являются:
принцип разомкнутого управления.
принцип управления по отклонению.
принцип компенсации.
принцип комбинированного управления.
Принцип разомкнутого управления.
Данный принцип заключается в том, что алгоритм управления строится только на основе алгоритма функционирования путем предварительного выбора законов, определяющее действие управляемого устройства или регулятора с учетом свойств управляемого объекта. Алгоритм функционирования может задаваться отдельным устройством (ЗАФ) или может быть заложен в конструкцию управляющего устройства или регулятора.
Примером данного принципа может служить пример разомкнутого цикла управления.
Принцип управления по отклонению.
Этот принцип также именуется принципом Уатта-Ползунова. Рассматриваемый принцип управления основан на том, что управляющее воздействие в автоматическом устройстве управления или регуляторе вырабатывается с учетом информации об отклонении.
Управление величины от заданного значения. Чтобы реализовать этот принцип, в автоматическом устройстве управления или в автоматическом регуляторе должно происходить сравнение действительного значения y(t) с заданным или предписанным x(t), и в зависимости от результатов полученного сравнения, формируется управляющее воздействие. Примером реализации данного принципа может служить пример замкнутого цикла функционирования.
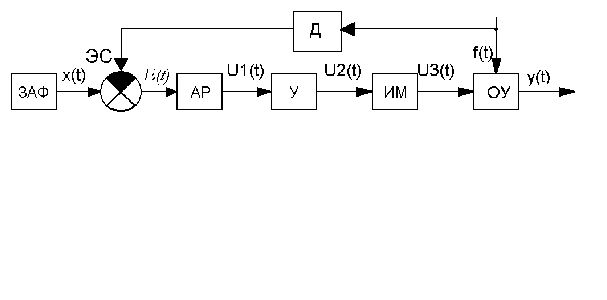
Принцип управления по возмущению (принцип компенсации возмущения).
Рассматриваемый принцип основан на том, что управляющее воздействие в САУ выбираются в зависимости от результатов измерения возмущающего воздействия, оказывающего влияние на ОУ. Функциональная схема управления такой САУ имеет вид:
Пример реализации принципа компенсации возмущения (управления по нагрузке):
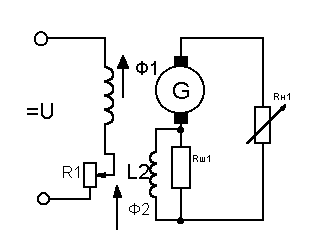
Напряжение на выходе генератора UГ – пропорционально суммарному магнитному потоку. Увеличение или уменьшение тока нагрузки зависит от сопротивления нагрузки. Такое изменение тока нагрузки не окажет никакого влияния на выходное напряжение генератора, т.к. ток нагрузки пропорционален магнитному потоку Ф2 и компенсирует изменение Ф1, т.е. значение суммарного потока постоянно при любых колебаниях нагрузки. Такой принцип носит название принципа управления по нагрузки.
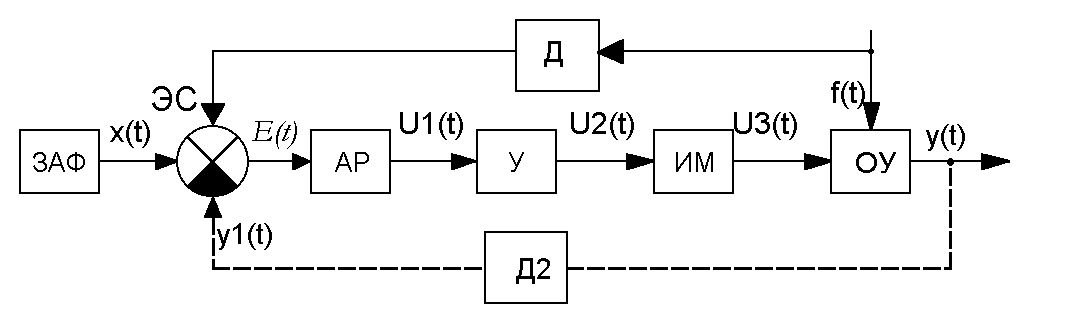
Принцип комбинированного управления.
Данный принцип реализуется путем совмещения двух принципов:
Принцип управления по отклонению.
Принцип управления по возмущению.
Совмещение этих двух принципов дает возможность улучшить качество управления, т.е. предписанное значение регулируемой величины будет более точно с меньшей погрешностью воспроизводиться на выходе системы.