§1.3. Обратные связи и их назначение
Из анализа процесса управления видно, что в организации самого процесса большую и решающую роль играет получение информации о результатах управления. При получении такой информации решение об управляющих действиях существенно зависит от результатов управления. Иными словами – первичный элемент, управляющий действием, зависит от вторичного элемента, вызываемый управляющим действием, т.е. причина, вызывающая изменение состояния ОУ находится в зависимости от того, какой результат она вызовет. Такая связь причины и следствия называется причинно-следственной или обратной связью.
Обратная связь – это связь по которой информация о состоянии ОУ (контролирующее воздействие, соответствующее действительному значению управляемой величины) передается с выхода системы на ее вход.
Обратные связи подразделяются:
отрицательные и положительные;
жесткие и гибкие;
местные и главные.
Если воздействие обратной связи, поступающее на вход системы по знаку совпадает со знаком задающего воздействия, то ее называют положительной, в противном случае связь определяют как отрицательную.
В автоматике ООС и ПОС принято указывать, начиная с функциональных схем следующим образом.
Если передаваемое воздействие зависит только от выходной величины и не зависит от времени – связь считают жесткой. Жесткие обратные связи, действуют как в установленном, так и в переходном режиме.
Обратная связь, оказывающая влияние на работу системы только в переходном процессе (режиме) называется гибкой. Такие связи реагируют на приращение воздействий, поступающих на вход системы. Те из них, что реагируют на производные от воздействий называются дифференцирующими гибкими связями, а те, которые реагируют на интегралы от воздействий, называются интегрирующими обратными гибкими связями.
Если обратная связь соединяет выход системы с ее входом, то ее называют главной, а остальные же обратные связи называют местными.
Такие связи служат для улучшения регулировочных свойств отдельных элементов или их групп, соединяя выход элемента, или группы с соответствующим входом. Такие связи, кроме названия местные именуют корректирующими. Местные и главные связи могут быть как жесткими, так и гибкими.
В случае размыкания главной обратной связи система работающая по замкнутому циклу переходит в режим работы по разомкнутому циклу. В случае же размыкания местной обратной связи система продолжает работать по заложенному в нее циклу.
§1.4. Управление по разомкнутому и замкнутому циклам
Поддержание управляемой величины в определенных пределах или изменение ее по заданному закону в процессе работы системы может быть выполнена как по разомкнутому, так и по замкнутому циклам.
Разомкнутый цикл управления
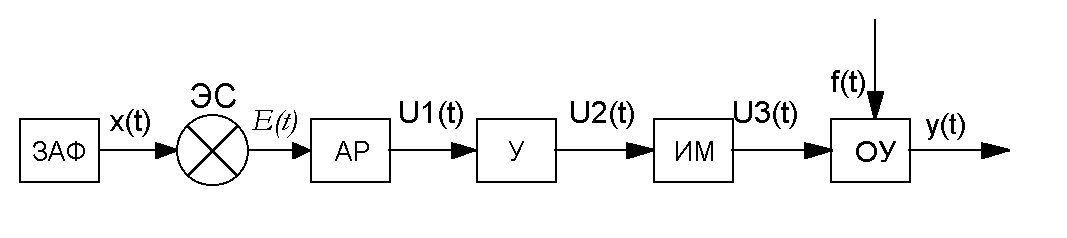
Воздействие x(t), поступающее на автоматическое устройство управления или автоматический регулятор от задатчика алгоритма функционирования не является функцией результата этого воздействия на объект управления – оно задается. Определенному значению x(t) будет соответствовать определенное текущее значение y(t), если возмущение f(t) не изменяется во времени (f(t)=const).
По сути, разомкнутая система представляет собой передаточную цель, в которой x(t) после определенной обработки АУУ или АР преобразуется во внутренние воздействия U1(t) и U2(t) и передается ОУ, но при этом нет обратного воздействия на АУУ или АР.
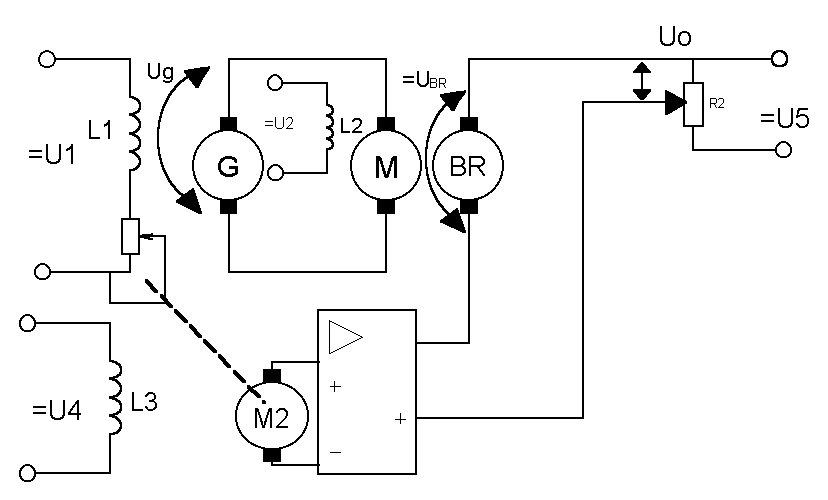
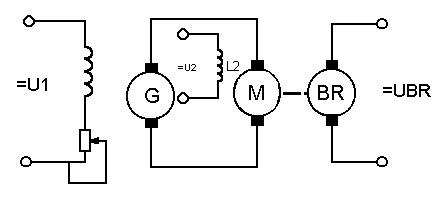
Покажем пример такого цикла функционирования, рассмотрев систему регулирования скоростью вращения ДПТ.
Замкнутый цикл управления
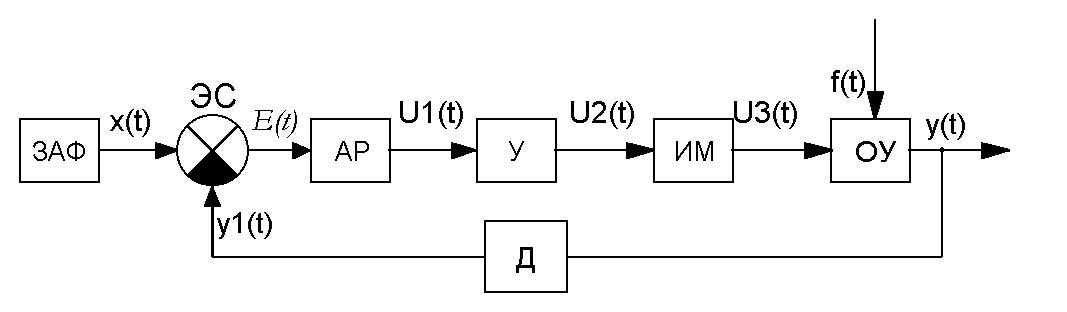
По замкнутому циклу САУ работает если соединить ее выход со входом АР или АУУ так, чтобы на него все время поступало 2 воздействия – с задатчика и с выхода ОУ, т.е. в рассматриваемой системе существует воздействие не только АУУ или АР на ОУ, но и ОУ на АУУ или АР.
Покажем пример работы системы АУ скорости вращения ДПТ, работающей по замкнутому циклу.