

§1.2. Понятие о воздействиях и сигналах
В процессе работы САУ в целом, а также, если рассматривать отдельные ее части, то либо система, либо ее составляющие, испытывают на себе воздействие различных факторов.
Воздействием в автоматике называют взаимодействие между автоматической системой и внешней средой, или одной ее части и другой, при котором в самой система происходят изменения. Соответственно различают внешние и внутренние воздействия.
Внутренними воздействиями называют такие, которые передаются от одной части системы на другую, образуя последовательную цепь воздействий, обеспечивающих протекание ТП с заданными показателями. Также воздействия называют управляющими и обозначают в функции времени как U(t).
Внешние воздействия разделяют на 2 вида:
Такие, которые необходимы для нормального протекания технологического процесса. Их подают на вход системы намеренно в соответствии с алгоритмом функционирования, обозначают x(t) или xз(t) и соответственно при этом называют задающими или предписанными.
Такие, которые поступают непосредственно в систему или объект из внешней среды, т.е. из окружающего пространства, или от технических средств и устройств, не принадлежащих рассматриваемой сичстеме. Также воздействие носят незапланированный, зачастую случайный характер, обозначаются как f(t) и называются возмущающими воздействиями или возмущениями.
Возмущения делятся на нагрузку и помеху.
Нагрузка – возмущение, поступающее в систему, помимо управляющего воздействия, влияющее на переменные состояния и параметры, которые характеризуют динамические свойства ОУ.
Помеха – возмущение, искажающее поступающую в управляющее устройство информацию о нагрузке, о состоянии и динамических свойствах ОУ, а также влияющее на переменное состояние и параметры управляющего устройства (УУ). Возмущения могут быть контролируемыми и не контролируемыми, детерминированными (заданными функцией времени) и стохастическими (случайными), основными и второстепенными.
Под влиянием заданного значения x(t) в системе автоматического управления происходят различные количественные и качественные изменения, в результате чего управляемые или регулируемые величины, обозначаемые как y(t) приобретают заданные значения, или получают требуемый характер изменения.
Значение управляемой величины, предусмотренное алгоритмом функционироваия называется предписанным, а измеренное, т.е. фактическое значение – действительным.
Кроме того, задающее значение x(t) называют входным, а управляемую величину y(t) – выходной.
Изобразим простейший алгоритм регулирования температуры внутри нагревательной камеры.
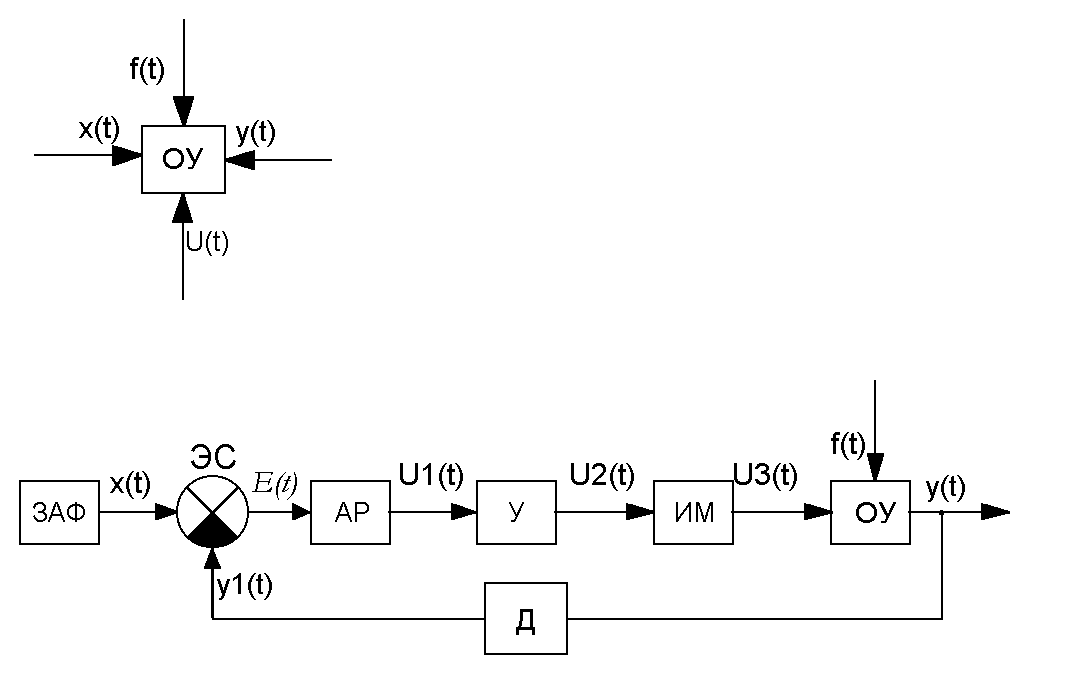
Управлять объектом – это значит вырабатывать управляющее воздействие U(t) с таким расчетом, чтобы управляемая или регулируемая величина y(t) изменялась по заданному закону и с требуемой точностью независимо от влияния на объект, а возмущающего воздействия f(t).
Любая САУ может быть представлена как взаимодействие автоматического управляющего устройства или автоматического регулятора и объекта управления.
Более просто можно показать влияние сигналов и воздействий, если рассмотреть только ОУ:
Если в системе одна управляемая величина, то такая система называется одноконтурной, а если этих величин несколько, причем изменение одной влияет на другие, то такую систему называют многоконтурной.