

4.6.3. Определение числа возможных планетарных механизмов
Количество возможных схем ПКП будет определяться числом сочетаний из n звеньев, получившихся в предыдущем пункте, по m элементам ПМ равным 3:
![]()
где –общее количество звеньев, а m – количество элементов ПМ.
В нашем случае мы берем n=6 и m=3, получится C=20.
4.6.4. Построение плана скоростей
1) План угловых скоростей основных звеньев ПКП представляет собой графическое изображение угловых скоростей всех основных звеньев ПКП (центральных зубчатых колёс – солнечных и эпициклических, а также водил), как функций независимой переменной (аргумента), в качестве которой выбирается угловая скорость ведомого вала ωx. План скоростей строится в прямоугольных (декартовых) координатах (ωx 0 ω). Для построения плана скоростей в масштабе, в первом квадранте определяется масштабная точка е с координатами: 1,0; 1,0.
2) Поскольку угловая скорость ведущего вала 0 и связанных с ним звеньев ПМ принята постоянной и равной 1, то через масштабную точку е в первом и втором квадрантах проводится горизонтальный луч с ординатой 1. Этому лучу присваивается индекс 0 (двигатель). На рисунке 4.10 красный луч.
3) Через масштабную точку е и начало координат 0 в первом и третьем квадрантах проводится луч угловой скорости ведомого вала X ПКП и связанных с ним звеньев ПМ. Этому лучу присваивается индекс х (ход). На рисунке 4.10 зеленый луч.
4) Через масштабную точку е и точки оси абсцисс (ωx), соответствующие значениям угловых скоростей ωx ведомого вала ПКП на передаче заднего хода (-1) и на 1, 2, 3 передачах переднего хода (ПХ) (см. исходные данные), проводятся лучи угловых скоростей тормозных звеньев ПКП, с помощью которых и получают все непрямые передачи ПКП. 1 передаче на рисунке 4.10 соответствует желтый луч, 2 передаче соответствует фиолетовый луч, 3 передаче голубой, заднего хода (-1) соответствует синий луч.
Значение ωx для передач определяется по формуле:
![]()
где
![]() – скорость ведомого вала на данной
передаче, а
– скорость ведомого вала на данной
передаче, а
![]() – скорость ведущего вала, принимаем
равную 1,
– скорость ведущего вала, принимаем
равную 1,
![]() – передаточное
число на данной передаче .
– передаточное
число на данной передаче .
5) Через точки оси абсцисс, соответствующие нулевым угловым скоростям тормозных звеньев на непрямых передачах (-I, I, II, III) и через проекции на каждой передаче ПКП, проведем вертикальные линии и отметим на них номера передач. Значения ординат точек пересечения лучей основных звеньев, ПКП с каждой вертикальной линией соответствуют величинам абсолютных угловых скоростей этих звеньев на соответствующей передаче.
Заметим, что состояние ПКП на оси ординат соответствует стоповому режиму ПКП или, что тоже самое, режиму трогания машины с места (ωx=0) при работающем двигателе (ωд=1). Для удобства дальнейшей работы с планом скоростей ПКП, используя подобие треугольников на плане скоростей, вычислим значения ординат или абсолютных угловых скоростей основных звеньев на передаче заднего хода. Из рисунка 4.10 видно, что именно на этой передаче относительные угловые скорости основных звеньев или разности ординат максимальны.
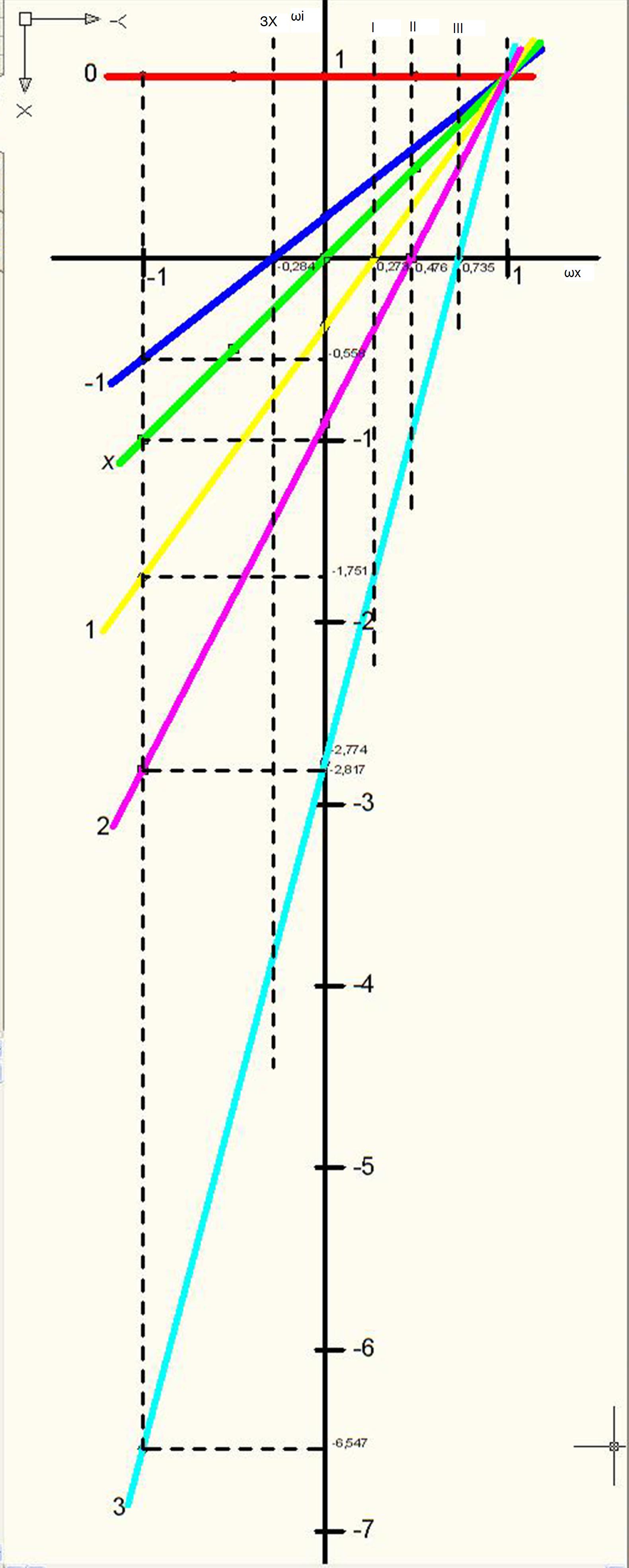
Рисунок 4.10 – План скоростей основных звеньев ПКП
Из плана скоростей видно, что, останавливая поочередно эти тормозные звенья, мы будем обеспечивать ведомому валу скорости, соответствующие непрямым передачам. Присвоим лучам угловых скоростей тормозных звеньев индексы 1, 2, 3. Торможение звена 1 обеспечивает первую передачу (I), торможение звена 2 обеспечивает вторую передачу (II),а торможение звена 3 обеспечивает передачу заднего хода (ЗХ). Третью (высшую) прямую передачу (III) мы будем получать блокировкой ПКП при помощи блокировочного фрикциона, устанавливаемого между какими-либо двумя основными звеньями ПКП. На прямой передаче в ПКП уравниваются угловые скорости всех её основных звеньев, что соответствует масштабной точке е на плане скоростей.