

21. Гироскоп: определение, устройство прибора, свойства.
Положение ЛА относительно плоскости горизонта определяется углами крена и тангажа. Для измерения углов крена и тангажа на самолетах используются устройства, называемые гировертикалями, основным элементом которых является гироскоп.
Классическим гироскопом принято называть симметричное относительно оси вращения быстровращающееся тело, ось которого имеет возможность изменять свое положение в пространстве.
У гироскопов, применяемых в технике, свободный поворот оси гироскопа можно обеспечить, закрепив сё в рамках (кольцах) 1, 2 так называемого карданового подвеса (рис. 5.4), позволяющего оси AB занять любое положение в пространстве. Такой гироскоп имеет 3 степени свободы: он может совершать 3 независимых поворота вокруг осей AB, DE и GK, пересекающихся в центре подвеса O, который остаётся по отношению к основанию 3 неподвижным. Если центр тяжести гироскопа совпадает с центром O, то он называется астатическим (уравновешенным), в противном случае – тяжёлым.
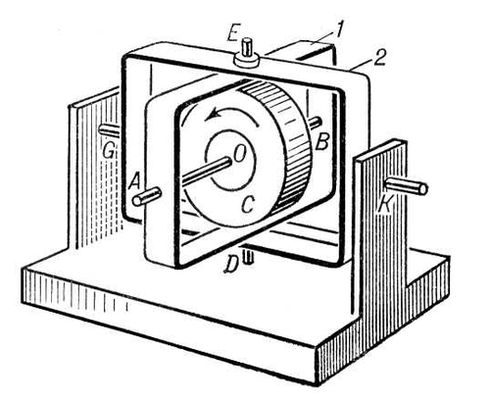
Рис. 5.4. Гироскоп в кардановом подвесе: ротор С, кроме вращения вокруг своей оси АВ, может вместе с рамкой 1 поворачиваться вокруг оси DE и вместе с рамкой 2 – вокруг оси GK; следовательно, ось ротора может занять любое положение в пространстве. О – центр подвеса, совпадающий с центром тяжести гироскопа.
Первое свойство уравновешенного гироскопа с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление.
Второе свойство гироскопа обнаруживается, когда на его ось (или рамку) начинают действовать сила, стремящаяся привести ось в движение. Под действием силы P конец A оси AB гироскопа будет отклонять не в сторону действия силы, а в направлении, перпендикулярном к этой силе; в результате гироскоп вместе с рамкой 1 начнёт вращаться вокруг оси DE с постоянной угловой скоростью. Это вращение называется прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси AB сам гироскоп. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия и ось AB мгновенно остановится, т.е. прецессионное движение гироскопа безынерционно.
22. Устройство и принцип действия авиагоризонта.
Гировертикаль, имеющая визуальную индикацию углов крена и тангажа, называется авиагоризонтом. Основным элементом авиагоризонта является гироскоп с тремя степенями свободы. Поскольку гироскоп сохраняет положение оси собственного вращения в инерциальном пространстве, в авиагоризонтах ось гироскопа приводится в вертикальное положение по отношению к Земле с помощью физического маятника, который используется для этой цели в то время, когда ЛА не имеет ускорений. В противном случае физический маятник показывает не истинную вертикаль, а направление, образованное равнодействующей от силы тяжести и инерционной силы.
В авиагоризонте собственная ось вращения гироскопа приводится в вертикальное положение системой маятниковой коррекции, в которую входят два однокоординатных электролитических маятника, управляющих коррекционными двигателями (датчиками моментов). В цепи поперечной коррекции имеется контакт, который разрывает цепь при совершении самолетом разворотов, уменьшая виражную погрешность.
Индикация по крену осуществляется с помощью силуэта самолета, механически связанного с внешней осью карданового подвеса гироскопа через трибки, а по тангажу с помощью шкалы, перемещающейся следящей системой, где датчиком угла является сельсин, установленный на оси тангажа. Время готовности прибора к работе в авиагоризонте сокращают с помощью механического арретира. Арретир приводит оси прибора в определенное положение относительно осей самолета. Если самолет находится в горизонтальном положении, то собственная ось вращения гироскопа устанавливается в вертикальное положение.