

2.2 Электроконтактные преобразователи и преобразователи контактного сопротивления
По своему назначению электроконтактные преобразователи (ЭКП) подразделяют на три группы: преобразователи с невысокой точностью фиксации положения контролируемого тела; преобразователи контроля размеров изделий, обеспечивающие высокую точность релейного преобразования перемещения в электрическое сопротивления; преобразователи, реагирующие не на механические перемещения, а на другие величины, например ускорение, магнитное поле и другие. К первой группе относятся микропереключатели, ко второй электроконтактные измерительные головки рисунок 2.1,а, к третьим герконы – герметизированные контакты. Принцип работы ЭКП заключается в том, что измеряемое механическое перемещение преобразуется в замкнутое или разомкнутое состояние контактов, управляющих электрической цепью. Для обеспечения метрологических характеристик в течение эксплуатации контакты выполняют из вольфрама, палладия, серебра и сплавов, ограничивают механические усилия на контакты и разрывную мощность электрической цепи. Наиболее широкое применение ЭКП получили в автоматических контрольных автоматах.
Рисунок 2.1. Контактный преобразователь а) и преобразователь контактного сопротивления б). Токоподводы Э1 и Э2 к электродам; ИШ – измерительный шток; ИЗ – изделие; К – электрический контакт; 1 – электрод; 2 – электропроводящая пластина; 3 – клей; 4 – изолятор из резины
Преобразователи контактного сопротивления рисунок 2.1(б) основаны на изменении под действием давления сопротивления между проводящими элементами, разделенными слоями полупроводящего материала. В качестве таких материалов используются электропроводящая резина, графитовые шайбы, металлические пластины, на которые напылением нанесен высокоомный резистивный слой. Преобразователи не отличаются высокой точностью, но просты конструктивно, высоконадежны, имеют достаточно большую выходную мощность. Они используются в основном в качестве тактильных датчиков роботов и манипуляторов, биоэлектрических протезах.
2.3 Реостатные измерительные преобразователи
Реостатным преобразователем называют реостат, движок которого попутно перемещается в соответствии со значением преобразуемой неэлектрической величины. Входной величиной реостатных преобразователей является линейное или угловое перемещения, а выходной величиной является изменение сопротивления по пути движка.
Реостатные преобразователи выполняются проводом, намотанным на каркас круглого или прямоугольного сечения. В качестве провода используют: манганин, константан, фехраль и в ответственных случаях, когда требования к износоустойчивости контактной поверхности особенно велика или когда контактные давления очень малы , применяют сплав платины с иридием , платины с палладием, рутением , осмием. Провод должен быть с эмалевой изоляцией. Движок (щётка) выполняют либо из двух-трёх проволок, изготовленных из сплава платины с иридием или из платины с бериллием, либо в виде пластинчатых щёток из серебра или фосфористой бронзы. В случае проволочных щёток контактные усилия должны быть порядка 0,003 ÷ 0,005 Н, а в случае пластинчатых 0,05 ÷ 0,1 Н.
Каркас реостатного преобразователя выполняется из текстолита или пластмассы, алюминия, покрытого изоляционным лаком или оксидной плёнкой толщиной до 10 мкм. Формы каркасов могут быть в виде плоской или цилиндрической пластины, плоского или цилиндрического кольца, плоского сегмента, реохорда.
Реостатные преобразователи являются ступенчатыми (дискретными) преобразователями. Это вызывает возникновение погрешности, определённой его разрешающей способностью γ=100 %/2W, где W – число витков (не менее 100 ÷ 200).
Характер шкалы прибора зависит также от измерительной цепи прибора. На рисунке 2.2. представлены наиболее типичные цепи приборов с реостатными преобразователями. Ток I в схеме «а» определяется выражением:
![]() ;
;
где l – отклонение движка, соответствующее текущему значению измеряемой величины; lн – номинальное значение сопротивления реостата (при Rр).
В цепи «б» реостат включен делителем напряжения, поэтому выходное напряжение определяется формулой:
 .
.
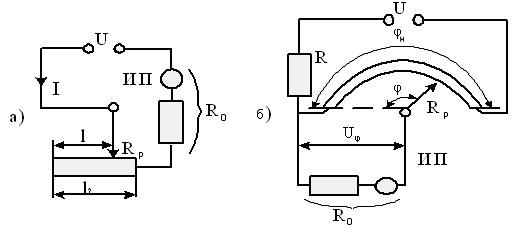

Рисунок 2.2 Типичные схемы приборов с реостатными преобразователями: а – реостатная, б – потенциометрическая, в – логометрическая, г – мостовая, схемы включения преобразователей
Наличие в знаменателе члена φ/φн приводит к нелинейной зависимости выходного напряжения Uφ от отклонения φ. Однако при бесконечном сопротивлении измерителя Rо этот член оказывается равным нулю и связь между Uφ и φ становится линейной:
 .
.
П
Схема «в» на рисунке 2.2 содержит реостат (потенциометр) с сопротивлением R=R1+R2 и две обмотки логометра, отклонение подвижной части которого α определяется соотношением:
![]() .
.
Преимущество логометрической схемы в том, что отклонение α не зависит от источника питания U.
Схема «г» представляет собой неравновесный мост, образованный участками сопротивления потенциометра r1, r2 и постоянными сопротивлениями R1, R2. Ток IИП через измерительный прибор ИП определяется соотношением:
![]() .
.
В отличие от равновесных схем неравновесные мостовые схемы отличаются сравнительно небольшой точностью, но большим быстродействием. Мостовые измерительные схемы позволяют получить дополнительную измерительную информацию в виде изменения знака выходной величины в зависимости от направления перемещения движка относительно его «нулевого» состояния.