

3. Емкостные преобразователи
В простейшем случае емкостные преобразователи представляют собой плоский конденсатор, состоящий из двух пластин с расстоянием δ, площадью S и диэлектрической проницаемостью среды ε (рисунок 3.1.).
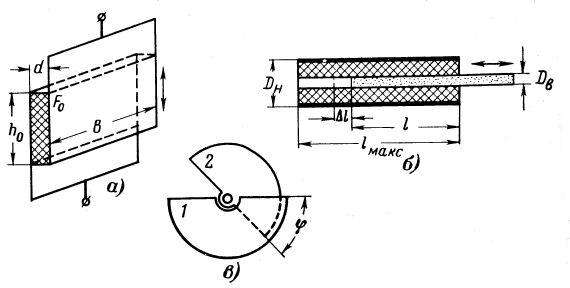
Рисунок 3.1. Ёмкостные преобразователи с изменяемой площадью:
а – плоский; б – цилиндрический; в – поворотный
Емкость плоского конденсатора определяется соотношением:
![]() ;
;
где S – действующая площадь обкладок, составляющих конденсатор; ε – относительная диэлектрическая проницаемость (для воздуха ε=1); ε0 – электрическая постоянная, равная 8,85·10−12 Ф/м; d – толщина диэлектрика (или расстояние между пластинами).
В зависимости от того, на какой параметр воздействует измеряемая величина, возможны следующие варианты:
![]() ,
ε=const
, d=
const;
,
ε=const
, d=
const;
![]() ,
F=const
, d=
const;
,
F=const
, d=
const;
![]() ,
F=const
, ε = const;
,
F=const
, ε = const;
Виды номинальных статических характеристик представлены на рисунке 3.2. Постоянство отмеченных параметров необходимо для уменьшения погрешности преобразования.
 Рисунок
3.2. Статические характеристики ёмкостных
преобразователей
Рисунок
3.2. Статические характеристики ёмкостных
преобразователей
(S – чувствительность преобразователя)
Некоторые применения ёмкостных преобразователей представлены на рисунках 3.3. – 3.8 [10 ].
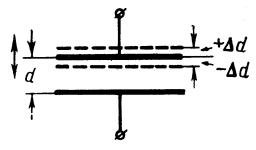
Рисунок 3.3. Ёмкостный преобразователь с изменением зазора
Абсолютное изменение
ёмкости
![]() а относительное изменение
а относительное изменение
![]() .
.
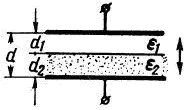
Рисунок 3.4. Преобразователь с переменной толщиной диэлектрика
а) б)
Рисунок 3.5. Ёмкостные преобразователи с переменным диэлектриком:
а) конструкция; б) эквивалентная схема
![]() ;
;
где b и h – линейные размеры пластин преобразователя.
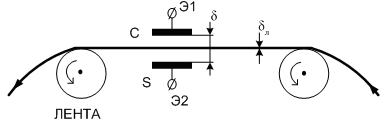
Рисунок 3.6. Изменение толщины диэлектрической ленты. δ – расстояние между пластинами, δл – толщина ленты, S – площадь пластин, ε0 – диэлектрическая проницаемость среды, εл – диэлектрическая проницаемость ленты
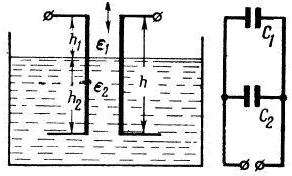
Рисунок 3.7. Изменение уровня волны
Емкость между электродами Э1, Э2 :
![]() ,
,
где R1, R2 – радиусы электродов; ln – длина электродов.
Рисунок 3.8. Дифференциальный емкостный преобразователь перемещения
Дифференциальный емкостный преобразователь специальной конструкции позволяет преобразовать перемещение от мм до мкм. Порог чувствительности составляет 10-14 м.
Преимущество емкостных преобразователей:
– низкая нагрузка на объект исследования;
– отсутствие шумов, возможность компенсации температурной погрешности, простота конструкции.
К недостаткам следует отнести высокое внутреннее сопротивление и малую выходную мощность.
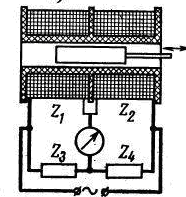
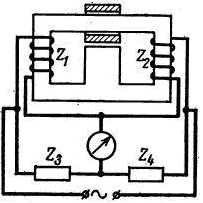
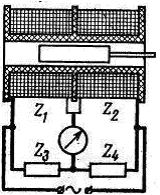
Возможные варианты измерительных схем с емкостными преобразователями представлены на рисунке 3.9.
 Рисунок
3.9. Измерительные схемы с емкостными
преобразователями: а – схема делителя;
б – мостовая дифференциальная схема;
в – схема с резонансным контуром
Рисунок
3.9. Измерительные схемы с емкостными
преобразователями: а – схема делителя;
б – мостовая дифференциальная схема;
в – схема с резонансным контуром
4. Индуктивные преобразователи
Принцип действия преобразователей основан на изменении индуктивности и комплексного сопротивления катушки под воздействием измеряемой неэлектрической величины.
В случае преобразования небольшого зазора δ.
 ,
,
где lж
– средняя
длина магнитной силовой линии в якоре
и ярме; F,
![]() – площадь сечения якоря и воздушного
зазора, δ – возникающие зазоры. В этой
формуле не учитываются потери на вихревые
токи и гистерезис, Rж
и R0
– магнитное сопротивление сердечника
и зазора;
– площадь сечения якоря и воздушного
зазора, δ – возникающие зазоры. В этой
формуле не учитываются потери на вихревые
токи и гистерезис, Rж
и R0
– магнитное сопротивление сердечника
и зазора;
![]() – число витков катушки.
– число витков катушки.
В случае Rж >> R0 индуктивность определяется по формуле
![]() .
.
Удовлетворительная линейность имеет место тогда, когда Δδ<<δзаз:
![]() .
.
Относительное изменение сопротивления Z и тока I будет тем больше, чем выше добротность катушки:
![]() .
.
Чувствительность индуктивного преобразователя
![]() ,
,
а полное сопротивление его обмотки на частоте
![]() ,
,
где
![]() -
активная составляющая сопротивления.
-
активная составляющая сопротивления.
Ток в обмотке определяется по формуле
![]() .
.
Рассмотрим схемы различных видов преобразователей.
На рисунке 4.1 представлен индуктивный дроссельный преобразователь.
Рисунок 4.1. Индуктивные преобразователи: а – с переменной площадью зазора (пределы изменения l=0-20 мм). На схеме Ст – статор ; Я – якорь; Zн – сопротивление нагрузки; Jн – ток в нагрузке; Ф – магнитный поток; W – число витков катушки
При этом изменяется сопротивление магнитному потоку, изменяется индуктивность катушки и комплексное сопротивление катушки:
На рисунке 4.2 представлен cоленоидальный преобразователь.
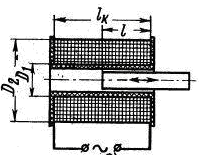
а) б)
Рисунок 4.2. Индуктивные сонолеидальные преобразователи: а – дифференциальный преобразователь; б – соленоидальный преобразователь; Z1 – Z4 – плечи моста; Д1, Д2 – габаритные размеры преобразователя
Линейные перемещения от l до 2000 мм. Индуктивность катушки L равна
![]() ,
,
где μж – магнитная проницаемость сердечника.
На рисунке 4.3 представлен трансформаторный преобразователь с изменением зазора
Рисунок 4.3. Трансформаторный преобразователь перемещения
При изменении воздушного зазора изменяется сопротивление магнитному потоку, при этом изменяется комплексное сопротивление катушки w1, следовательно изменяется и падение напряжения на этой обмотке, U1, вместе с Zн они образуют делитель напряжения, следовательно, будет изменяться выходное напряжение
![]() .
.
На рисунке 4.4 изображены разновидности конструкций и схем трансформаторных индуктивных преобразователей.
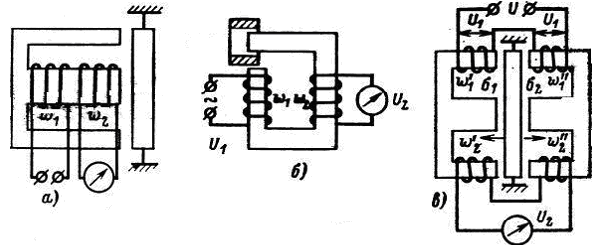
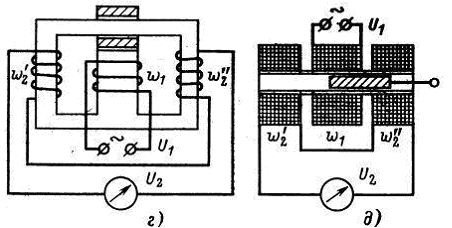
Рисунок 4.4. Конструкции и схемы трансформаторных индуктивных преобразователей
На рисунке 4.5 представлены конструкции и схемы включения дифференциальных индуктивных преобразователей
а) б) в)
Рисунок 4.5. Конструкции и схемы включения дифференциальных индуктивных преобразователей: а – с переменным зазором; б – с переменной площадью экрана ; в – соленоидного типа
Дифференциальной называется схема потому, что при уменьшении δ1 будет увеличиваться зазор δ2, т.е изменяться с разными знаками. При изменении зазоров δ изменяется комплексные сопротивления Z1 и Z 2 . При этом увеличивается в два раза чувствительность, уменьшается подавляющее большинство погрешностей, внешние влияния с одинаковым знаком компенсируются, расширяется линейный участок характеристики (до 30 %). Такая схема обнаруживает направление изменения δ и используется в фазочувствительных схемах.
5. МАГНИТОУПРУГИЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
Принцип работы заключается в следующем: если подвергнуть механическим деформациям ферромагнитный сердечник, то можно наблюдать изменение его магнитной проницаемости (рисунок 5.1.):
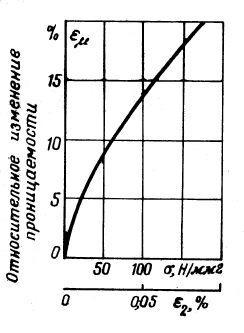
Рисунок 5.1. – график изменения относительной магнитной проницаемости железа армко от механического напряжения
При изменении магнитной проницаемости под воздействием давления изменяется индуктивность преобразователя и, следовательно, полное сопротивление катушки и тока, протекающего через катушку: р-σ-μ-L-Z-I:
![]()
где
Sж
– сечение
железа, l
– длина магнита,
![]() – сопротивление потерь в стали, ω –
круговая частота, Ф – эффективное
значение магнитного потока в сердечнике,
– сопротивление потерь в стали, ω –
круговая частота, Ф – эффективное
значение магнитного потока в сердечнике,
![]() – сопротивление потерь в стали. Полное
сопротивление катушки:
– сопротивление потерь в стали. Полное
сопротивление катушки:
![]() ,
,
![]() –
активное сопротивление
магнитопровода ;
–
активное сопротивление
магнитопровода ;
![]() –
реактивная
составляющая сопротивления (вихревые
токи, потери на гистерезис);
–
реактивная
составляющая сопротивления (вихревые
токи, потери на гистерезис);
![]() – мощность потерь в стали ;
– мощность потерь в стали ;
![]() - круговая частота
источника питания;
Ф – эффективное значение магнитной
индукции.
- круговая частота
источника питания;
Ф – эффективное значение магнитной
индукции.

Рисунок 5.2. Конструкции и схемы магнитоупругих преобразователей: а, б – дроссельные; в – трансформаторные; д – преобразователь со скрещёнными обмотками
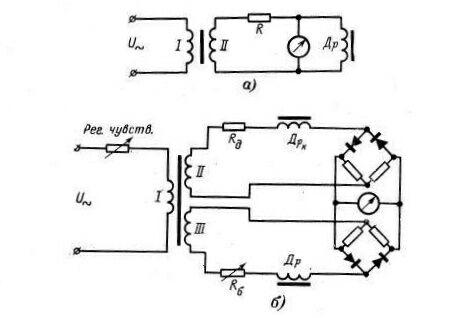
Рисунок 5.3. схемы включения магнитоупругих преобразователей: а – последовательная; б – компенсационная; Др – магнитоупругие преобразователи; Дрк – компенсационный преобразователь
Основными источниками погрешности являются: температурная погрешность (μ=f(t0)) и погрешность от гистерезиса. Для уменьшения этих погрешностей используется дифференциальная измерительная схема. Схемы включения магнитоупругих преобразователей приведены на рисунке 5.3.