

1.5 Содержание проекта
1.5.1 Кинематический анализ механизмов
Построить механизм в одном из его положений. Обычно это первое положение, определяемое углом φ.
Построить план скоростей и ускорений по найденным значениям угловой скорости и углового ускорения входного звена.
Определить значения угловых и линейных параметров звеньев и точек механизма, полученных методом планов.
Определить эти же параметры аналитическим методом, сравнить их значения со значениями, полученными методом планов, и при расхождениях, не
превышающих 5 %, ввести входные и выходные параметры в компьютер и получить распечатки.
1.5.2 Силовой анализ механизмов
Произвести силовой анализ механизма и определить реакции в кинематических парах и уравновешивающую силу.
Построить безмасштабный план скоростей, повернутый на 90° и методом рычага Н.Е. Жуковского определить уравновешивающую силу.
Ввести в компьютер все входные параметры по кинематическому и силовому анализу и получить распечатку по силовому анализу.
1.5.3 Синтез и анализ кулачкового механизма
Выполнить:
Для поступательно движущегося или коромыслового толкателя (в зависимости от задания) определить все кинематические параметры. В дальнейшем, для удобства, ведомое звено кулачкового механизма будем называть просто толкателем или коромыслом в зависимости от вида его движения.
Построить диаграмму аналогов скоростей.
Определить радиус начальной шайбы кулачка и построить центровой профиль
кулачка.
4. Составить таблицу входных данных и рассчитать на ЭВМ центровой профиль кулачка.
5. По данным, выведенным на печать, построить центровой профиль кулачка на построенном ранее профиле.
Провести кинематическое исследование планетарной (дифференциальной) передачи графическим и аналитическим методами и сравнить результаты.
Ввести данные в ЭВМ и получить распечатку (при необходимости).
2. Задания к курсовому проекту
Табл. 2.1. Данные к заданию листов №1 и №2 курсового проектирования(стр. 9).
Табл. 2.2. Данные к заданию листа №3 курсового проектирования.
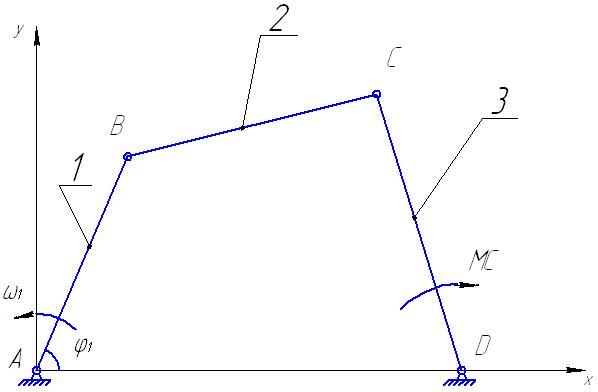
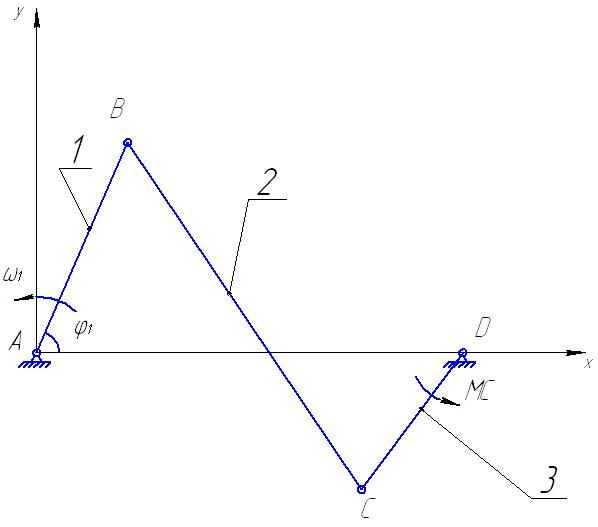
На рис. 2.1 - 2.4 представлены структурные схемы к курсовому проектированию.
Механизм №1 Механизм №2
Механизм №3 Механизм №4


Рис 2.1

II(1) II(2) II(3)
Рис 2.2
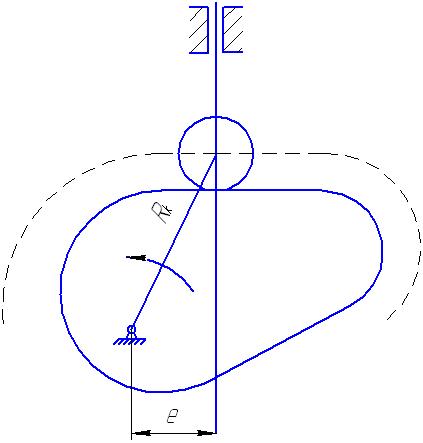

Рис 2.3 Рис 2.4
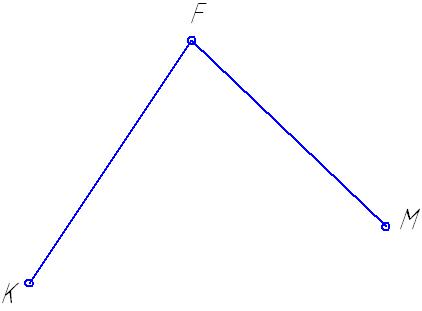
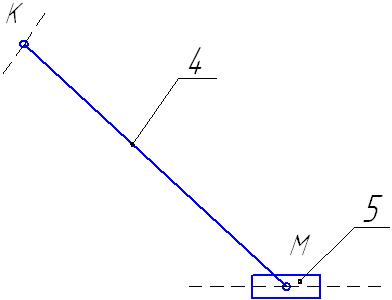
Звенья основного механизма, на которых располагаются точки К и М присоединяемых групп |
К |
1 |
2 |
0 |
2 |
3 |
2 |
2 |
1 |
2 |
1 |
2 |
2 |
2 |
1 |
||
М |
2 |
3 |
2 |
1 |
2 |
3 |
1 |
2 |
3 |
2 |
1 |
1 |
3 |
2 |
|||
Присоединяемая группа |
II(2) |
II(1) |
II(3) |
II(2) |
II(3) |
II(1) |
II(2) |
II(3) |
II(3) |
II(1) |
II(2) |
II(3) |
II(3) |
II(2) |
|||
Номер основного механизма |
1 |
2 |
3 |
3 |
1 |
2 |
3 |
3 |
1 |
2 |
3 |
3 |
1 |
3 |
|||
Угловое положение кривошипа φ, град |
30 |
Угловая скорость кривошипа Рад/с |
50 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
240 |
40 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
||
60 |
20 |
29 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
40 |
41 |
42 |
||
300 |
25 |
43 |
44 |
45 |
46 |
47 |
48 |
49 |
50 |
51 |
52 |
53 |
54 |
55 |
56 |
||
210 |
60 |
57 |
58 |
59 |
60 |
61 |
62 |
63 |
64 |
65 |
66 |
67 |
68 |
69 |
70 |
||
240 |
30 |
71 |
72 |
73 |
74 |
75 |
76 |
77 |
78 |
79 |
80 |
81 |
82 |
83 |
84 |
||
120 |
100 |
85 |
86 |
87 |
88 |
89 |
90 |
91 |
92 |
93 |
94 |
95 |
96 |
97 |
98 |
||
330 |
20 |
99 |
100 |
101 |
102 |
103 |
104 |
105 |
106 |
107 |
108 |
109 |
110 |
111 |
112 |
||
30 |
50 |
113 |
114 |
115 |
116 |
117 |
118 |
119 |
120 |
121 |
122 |
123 |
124 |
125 |
126 |
||
60 |
70 |
127 |
128 |
129 |
130 |
131 |
132 |
133 |
134 |
135 |
136 |
137 |
138 |
139 |
140 |
||
Размеры звеньев |
Кривошип АВ (L1) |
50 |
60 |
70 |
80 |
90 |
100 |
50 |
60 |
70 |
80 |
70 |
60 |
50 |
80 |
||
Шатун ВС (L2) |
100 |
90 |
180 |
120 |
200 |
250 |
80 |
120 |
150 |
200 |
120 |
150 |
100 |
150 |
|||
Коромысло CD (L3) |
80 |
70 |
|
100 |
150 |
120 |
70 |
100 |
80 |
150 |
100 |
80 |
70 |
120 |
|||
Между точками A и D(L0) |
Выбрать условия: L1+L2<=L3+L0 |
||||||||||||||||
Кулиса КЕ |
Конструкти 222 |
||||||||||||||||
АМ |
- |
- |
- |
АВ/2 |
- |
- |
- |
- |
- |
- |
- |
АВ/2 |
- |
|
|||
АК |
АВ/2 |
- |
АВ |
- |
- |
- |
- |
АВ/2 |
- |
- |
- |
- |
- |
АВ/2 |
|||
СМ |
- |
- |
ВС |
- |
- |
CD/2 |
- |
- |
CD/2 |
- |
- |
- |
CD/2 |
BC/2 |
|||
СК |
- |
BC/3 |
- |
BC/2 |
- |
- |
BC/2 |
- |
BC/2 |
- |
- |
- |
- |
- |
|||
Погонная масса q, кг/м |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
35 |
30 |
25 |
20 |
30 |
25 |
40 |
|||
Сила сопротивления Рс, Н |
- |
- |
50 |
60 |
- |
- |
60 |
40 |
- |
- |
40 |
60 |
- |
60 |
|||
Момент сопротивления Мс, Н*м |
5 |
10 |
- |
- |
8 |
7 |
- |
- |
10 |
6 |
- |
- |
5 |
-- |
|||
Таблица 2.2
Закон движения толкателя (коромысла) |
|
|
|
|
|
|
|
|
|
Максимальный ход толкателя S, мм |
Угол размаха коромысла |
|
Тип кулачкового механизма |
А |
Б |
А |
Б |
А |
Б |
А |
Б |
А |
|
|
|
Угловая скорость кулачкаWк, Рад/с |
30 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
40 |
35 |
40 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
70 |
40 |
|
20 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
50 |
50 |
|
10 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
30 |
60 |
|
30 |
37 |
38 |
39 |
40 |
41 |
42 |
43 |
44 |
45 |
60 |
37 |
|
50 |
46 |
47 |
48 |
49 |
50 |
51 |
52 |
53 |
54 |
70 |
45 |
|
20 |
55 |
56 |
57 |
58 |
59 |
60 |
61 |
62 |
63 |
80 |
50 |
|
30 |
64 |
65 |
66 |
67 |
68 |
69 |
70 |
71 |
72 |
50 |
60 |
|
40 |
73 |
74 |
75 |
76 |
77 |
78 |
79 |
80 |
81 |
30 |
40 |
|
10 |
82 |
83 |
84 |
85 |
86 |
87 |
88 |
89 |
90 |
40 |
30 |
|
Допустимый угол давления |
30 |
20 |
40 |
25 |
20 |
30 |
35 |
30 |
20 |
|
|
|
Дезаксия (для типа А), мм |
20 |
40 |
0 |
15 |
10 |
0 |
20 |
30 |
0 |
|
|
|
Длина коромысла (для типа Б) |
100 |
170 |
150 |
120 |
80 |
90 |
110 |
140 |
130 |
|
|
|
3. Задания на исследовательский курсовой проект
РАЗМЕРЫ ЗВЕНЬЕВ МЕХАНИЗМОВ
Во всех схемах
L = 600 ... 1200 мм.
Длина батана lO1C = R = 600 ... 800 мм,
а = 0,5R; lAO2 = 0,2R; lCE = 0,2R; LO1CE = 120°,
LAO2B = 90°.
Кроме того
для схем 1, 2, 4, 6, 7, и 9 LBO2 = 0,6R;
для схем 5, 6, 8, h = (0,8 ... 0,9)R;
для схем 4, 6, 9 lBF = lDF;
для схемы 8 lBD = lDC.
Батан показан в крайнем левом положении. При этом α = 60°
( в схеме 7 α0 = 0).
Сила прибоя P направлена перпендикулярно линии EO1 , приложена в т. E и изменяется по линейному закону от 0 до 100 H при повороте кулачкового вала на оборота (при подходе батана к крайнему правому положению).
Момент ¼ инерции рычага AO2B относительно оси вращения
![]() ,
где m1
– масса рычага (mi
= 2кг). Момент инерции шатуна относительно
его центра тяжести
,
где m1
– масса рычага (mi
= 2кг). Момент инерции шатуна относительно
его центра тяжести
![]() ,
где mi
– масса шатуна (mi
= 3кг), l1
– длина его. Момент инерции батана
относительно его ц.т.
,
где mi
– масса шатуна (mi
= 3кг), l1
– длина его. Момент инерции батана
относительно его ц.т.
![]() ,
где
,
где
![]() – масса батана (
= 30...50кг).
– масса батана (
= 30...50кг).
Массы остальных звеньев принять m = 2...3кг.
Массы ползуна не учитывать. Центр тяжести рычага AO2B в т. O2; батана 3 на расстоянии 2/3 R от оси вращения, остальных звеньев – посередине соответствующего звена.
Момент инерции кулака относительно оси вращения
I0 = (0,01...0,02) кгм2
Рисунки с данными на исследовательский курсовой проект:
Задание №1

Рис. 3.1
Задание №2

Рис. 3.2
Задание №3

Рис. 3.3
Задание №4 Задание №5

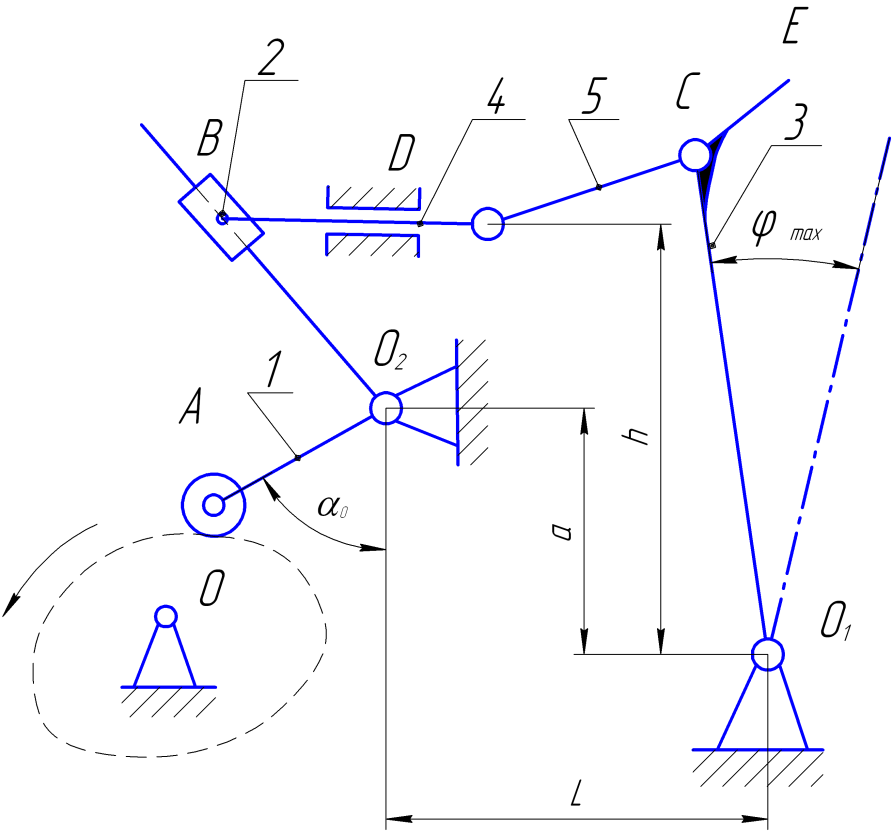
Рис. 3.4 Рис. 3.5
Задание №6 Задание №7. Механизм пуансона БШМ-2А
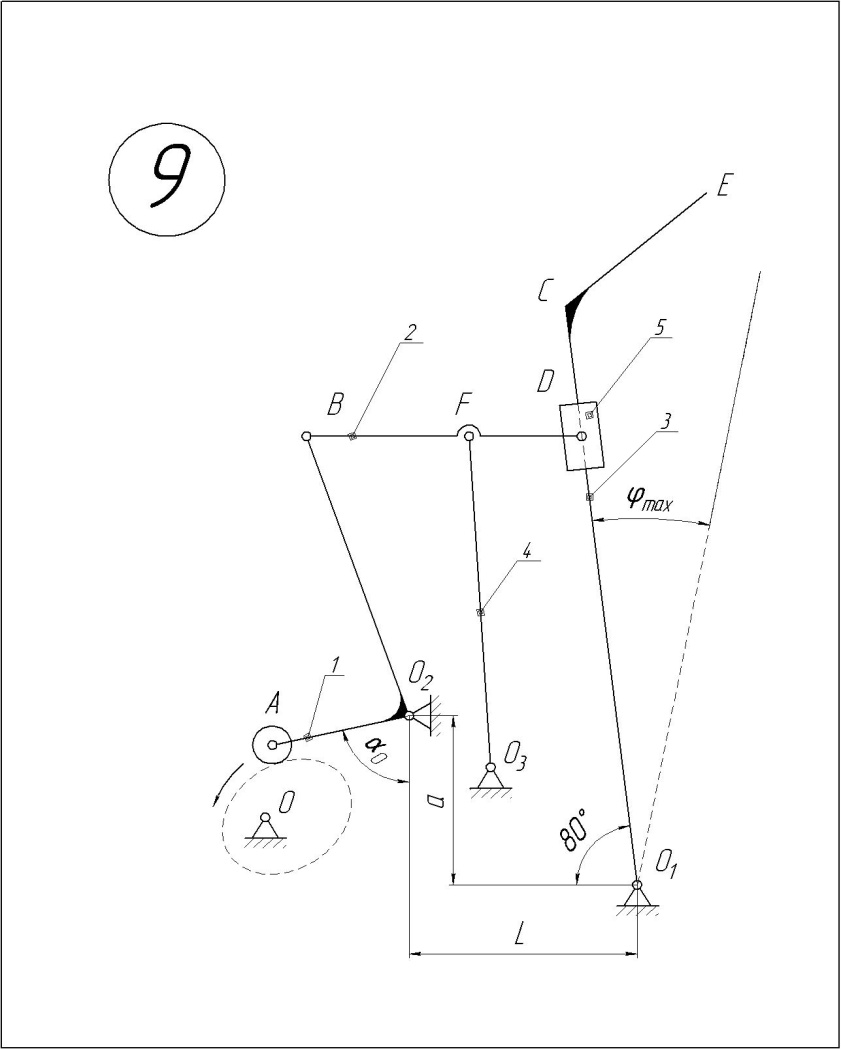

Рис. 3.6 Рис. 3.7
Задание №8. Механизм двигателя ткани Задание №9. Механизм вертикальных
Швейной машины 51-А класса перемещений иглы петельного
Полуавтомата 1025 класса


Рис. 3.8 Рис. 3.9
OA=10мм;20мм; δ2=120˚;150˚;
AB=50мм;70мм; GH=10мм;20мм;
BC30=мм;40мм; Хc=-65мм;-50мм;
CD=30мм;40мм; Yс=-10мм;-20мм;
DF=60мм;70мм; δ1=90˚;
FE=20мм;30мм;
OE=10мм;0 n1=3500 об/мин;2000 об/мин.
Задание №10.Механизм нитепритягивателя Задание №11.Механизм иглы петельного полуавтомата 1025 класса. краеобмёточной машины
208 класса.

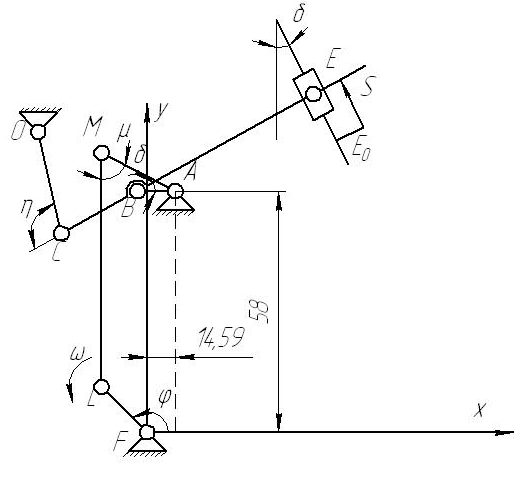
Рис.3.10 Рис. 3.11
FL=10мм;20мм; δ=15˚;20˚;
LM=50мм;60мм; ХА=15мм;20мм;
AM=20мм;30мм; YА=60мм;70мм;
AB=15мм;20мм; ХD=-20мм;-30мм;
BC=20мм;30мм; YD=80мм;90мм;
CD=30мм;40мм;
BE=40мм;50мм; nFL=5000об/мин;4000 об/мин.
Задание №12. Механизм вертикальных перемещений
транспортирующей лапки машины 897М класса.
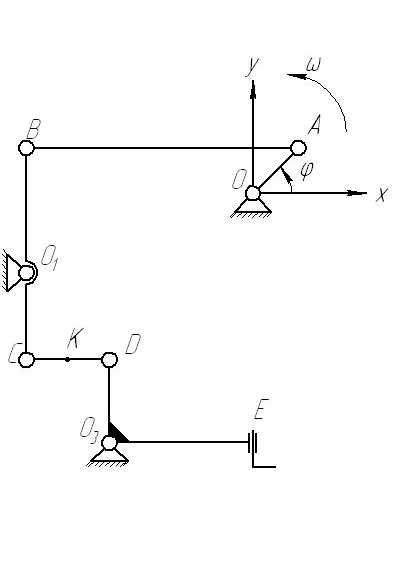
Рис. 3.12
Задание №13. Механизм двигателя ткани швейной машины.

Рис.3.13
Задание №14. Механизм обрезки края ткани машины 131 ряда.

Рис.3.14
FL=20мм; 30мм;
KL=20мм; 30мм;
ML=80мм; 100мм;
OA=10мм; 20мм; XM=-100мм; -150мм;
BC=20мм; 30мм; YE=-70мм; -80мм;
CD=20мм; 40мм; XK=-60мм; -70мм;
ED=30мм; 50мм; YK=-80мм; -90мм.
DF=70мм; 80мм
EF=40мм; 50мм n1=4000 об/мин; 5000 об/мин
Задание №15. Механизм качения челнока швейного полуавтомата 220 М класса.

Рис.3.15
OA=20мм; 25мм;
AB=160мм; 180мм;
BC=40мм; 30мм;
ED=20; 30;
δ=90˚; 60˚;
n1=2000 об/мин; 3000 об/мин;
YE=-190мм; -170мм; YC=-170мм; -150мм.
Задание №16. Кулисный механизм нитепритягивателя швейной машины.

Рис. 3.16
AB=20мм; 30мм;
BC=50мм; 70мм;
BE=10мм; 0;
BD=10мм; 20мм;
XO=-10мм; -20мм;
YO=30мм; 50мм; <δ=90˚; 60˚; <BED=90˚;
OK=50мм; 60мм; n1=2500 об/мин; 3000 об/мин.
Задание №17. Механизм иглы закрепочного полуавтомата 820 класса.
Рис. 3.17
OA=20мм; AB=52.8мм; n=2500 об/мин; m2=19.3 г;
m3=37г; XS₂=0; XS₃=0.9мм;
YS₂=34.8мм; YS₃=-4.8мм; IS₂=101 см2.
Задание №18. Механизм нитепритягивателя закрепочного полуавтомата 820 класса.

Рис. 3.18
OA=17мм; BD=4.3мм;
AB=24.9мм; BC=30.4мм;
n=2750 об/мин; BE=16.7мм;
m2=17.9 г; YC=28.9мм;
m3=21.2 г; XC=20.5мм;
XS₂=3.0; XS₃=0; IS₂=41.2 г/см2;
YS₂=11.1мм; YS₃=12мм; IS₃=28.3 г/см2.
Задание №19. Механизм нитепритягивателя.

Рис.3.19
OA=14.4мм; BD=34.9мм;
AB=24.9мм; BC=30.6мм;
n=4500 об/мин; α=0.431 рад;
m2=15 г; YC=28.4мм;
m3=12 г; XC=17.3мм; XS₂=2.8; XS₃=0; IS₂=53 г/см2.
Задание №20. Механизм иглы швейной машины 31 ряда.

Рис. 3.20
OA=18.5мм;
AB=66мм;
n=4500 об/мин;
m2=24.9 г;
m3=155 г;
XS₂=0; XS₃=6мм;
YS₂=44.2мм;
YS₃=25.4мм; IS₂=187 см2.