

7 Расчет потерь
7.1 Потери в стали основные
 для
стали 2013
для
стали 2013


где
 ;
;

7.2 Поверхностные потери в роторе

где


для


7.3 Пульсационные потери в зубцах ротора


где


 где
где


7.4 Сумма добавочных потерь в стали

( и
и
 ).
).
7.5 Полные потери в стали

7.6 Механические потери

для
двигателей с
 коэффициент
коэффициент

7.7 Холостой ход двигателя




8 Расчет рабочих характеристик
8.1 Параметры



используем
приближенную формулу, так как


Активная составляющая тока синхронного холостого хода





Потери, не изменяющиеся при изменении скольжения

8.2
Рассчитываем рабочие характеристики
для скольжений
 принимая
предварительно что
принимая
предварительно что
 Результаты расчета сведены в таблицу
1. После построения рабочих характеристик
(рисунок 3) уточняем значение номинального
скольжения
Результаты расчета сведены в таблицу
1. После построения рабочих характеристик
(рисунок 3) уточняем значение номинального
скольжения

Номинальные данные спроектированного двигателя





Рабочие характеристики асинхронного двигателя (таблица 1)
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Таблица 1.1 - Рабочие характеристики асинхронного двигателя
|
Расчетная формула |
Раз- мер- но- сть |
Скольжение, S |
||||||
0,005 |
0,01 |
0,015 |
0,02 |
0,025 |
0,03 |
Sном= 0.042 |
|||
1 |
|
Ом |
47.86 |
23.93 |
15.95 |
11.96 |
9.57 |
7.97 |
10.03 |
2 |
|
Ом |
48.21 |
24.28 |
16.3 |
12.32 |
9.92 |
8.33 |
10.38 |
3 |
|
Ом |
1.97 |
1.97 |
1.97 |
1.97 |
1.97 |
1.97 |
1.97 |


4 |
|
Ом |
48.25 |
24.36 |
16.42 |
12.47 |
10.12 |
8.56 |
10.57 |
5 |
|
А |
7.87 |
15.59 |
23.14 |
30.47 |
37.56 |
44.4 |
35.96 |
6 |
|
_ |
0.9992 |
0,9967 |
0,9927 |
0,9874 |
0,9807 |
0,973 |
0,9824 |
7 |
|
_ |
0,0409 |
0,0811 |
0.1203 |
0.1584 |
0.1953 |
0.2308 |
0.187 |
8 |
|
А |
8.7 |
16.38 |
23.8 |
30.92 |
37.67 |
44.04 |
36.16 |
9 |
|
А |
16.7 |
17.65 |
19.17 |
21.2 |
23.7 |
26.63 |
23.1 |
10 |
|
А |
18.83 |
24.08 |
30.56 |
37.49 |
44.52 |
51.46 |
42.92 |
11 |
|
А |
8.17 |
16.18 |
24.01 |
31.61 |
38.97 |
46.07 |
37.32 |
12 |
|
кВт |
9.93 |
18.68 |
27.14 |
35.25 |
42.95 |
50.2 |
41.23 |
13 |
|
кВт |
0.359 |
0.587 |
0.946 |
1.423 |
2.01 |
2.68 |
1.86 |
14 |
|
кВт |
0,044 |
0.174 |
0.384 |
0.666 |
1.013 |
1.415 |
0.928 |
15 |
|
кВт |
0.049 |
0.093 |
0.136 |
0.176 |
0.215 |
0.251 |
0.206 |
16 |
|
кВт |
1.86 |
2.26 |
2.87 |
3.67 |
4.64 |
5.76 |
4.41 |
17 |
|
кВт |
8.06 |
16.41 |
24.26 |
31.57 |
38.3 |
44.44 |
36.8 |
18 |
|
_ |
0.812 |
0.878 |
0.894 |
0.895 |
0.891 |
0.885 |
0.893 |
19 |
|
_ |
0.462 |
0.68 |
0.778 |
0.825 |
0.846 |
0.856 |
0.843 |




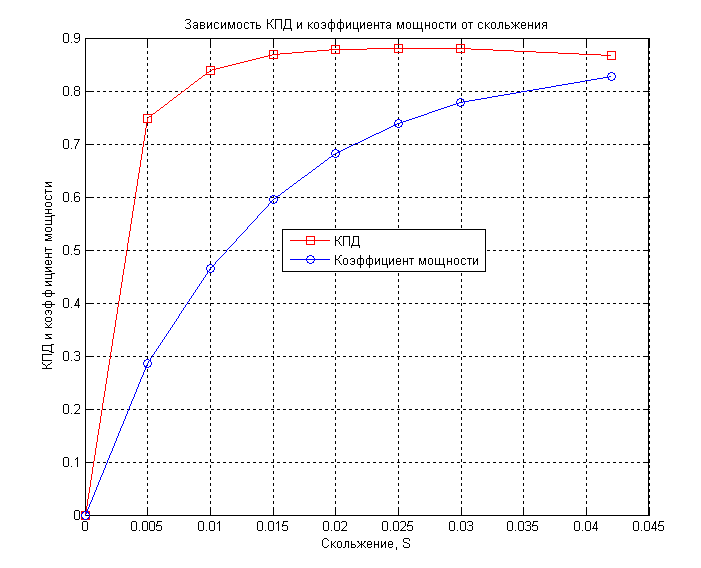
Рисунок 1.3 – Зависимость КПД и коэффициента мощности от скольжения
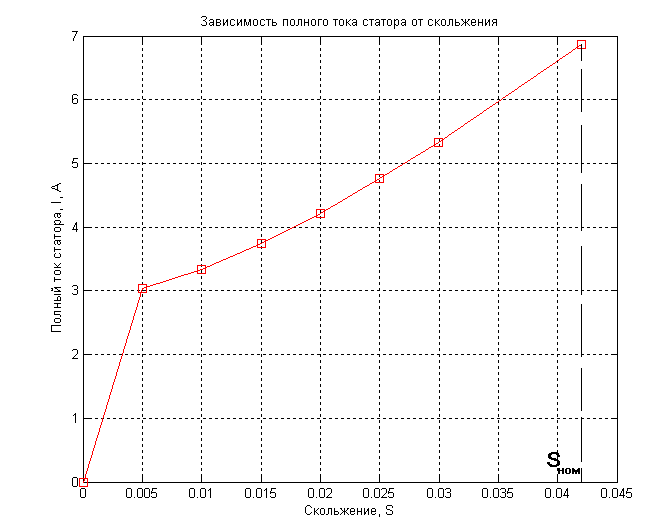
Рисунок 1.4 – Зависимость полного тока статора и мощности от скольжения