

2. Лабораторная работа №2 «Автоматический измеритель сшт-11»
2.1. Цели работы автоматического измерителя сшт-11
СШТ-11 – автоматизация процесса ковки без механической связи подвижной поперечины пресса с датчиком.
Цель работы: ознакомиться со способами автоматизации процесса ковки на основе измерителя поковок СШТ-11 с радиоизотопным датчиком.
2.2. Устройство сшт-11
Принцип действия автоматического измерителя поковок СШТ-11 с радиоизотопным датчиком следующий.
На подвижной поперечине пресса монтируют источник 1 β- излучения (рис. 2.1). Рядом с прессом устанавливают механизм перемещения каретки с двумя радиоизотопными датчиками 2 и 3. Радиоизотопный датчик 2 является основным рабочим, а датчик 3 – резервным, на случай несрабатывания основной системы.

Рис. 3 Схема устройства СШТ-11
Перед ковкой оператор пресса с пульта управления устанавливает требуемый размер поковки по стрелочному указателю 4. При этом электродвигатель 5 вращает ходовой винт 6, и каретка 7 с датчиками перемещается на требуемый уровень. Вращение от винта через сельсин – датчик СД и сельсин-приемник СП передается на стрелочный уровень 4. Таким образом, установленному размеру будет соответствовать определенный уровень положения радиоизотопных датчиков. При перемещении подвижной поперечины вниз, как только источник 1 поравняется с датчиком 2, происходит облучение последнего, сигнал подается на блок управления 8, от которого поступает на электрозолотник 9 управления прессом. Поскольку скорость обратного хода постоянна, то величина обратного хода регулируется с помощью электронного реле времени.
2.3. Аппаратная реализация автоматического режима управления работой пресса
Измеритель поковок СШТ-11 обеспечивает автоматическую работу пресса при операциях вытяжки, раскатки, осадки, разгонки, шлихтовки в следующих режимах.
Автоматический реверс подвижной поперечины по достижении заданного размера. Все остальные команды осуществляет оператор пресса.
Автоматическая ковка до заданного размера с плавной регулировкой хода и выстоя поперечины в верхнем положении.
Автоматическая шлихтовка с числом ходов подвижной поперечины в минуту до 100 на прессах 2000-3000 тонн.
Для обеспечения работы в автоматических режимах в напорную (масляную) магистраль 1 (рис.4), идущую от насоса к штатному следящему сервомотору, встраивается гидравлическая аппаратура управления в соответствии со схемой автоматизации. Между тягой 2 управления и золотником следящего сервомотора 3 устанавливают дополнительный трехпозиционный сервомотор 4 с подвижной рамкой 8. В режиме ручного управления электромагниты Э1С, Э2В, Э3Н золотников 5, 6, 7 отключены. Полости А, Б и В сервомотора соединены со сливом и рамка 8 может свободно перемещаться по своим направляющим. Всеми перемещениями подвижной поперечины пресса оператор управляет с помощью рукоятки, расположенной на пульте
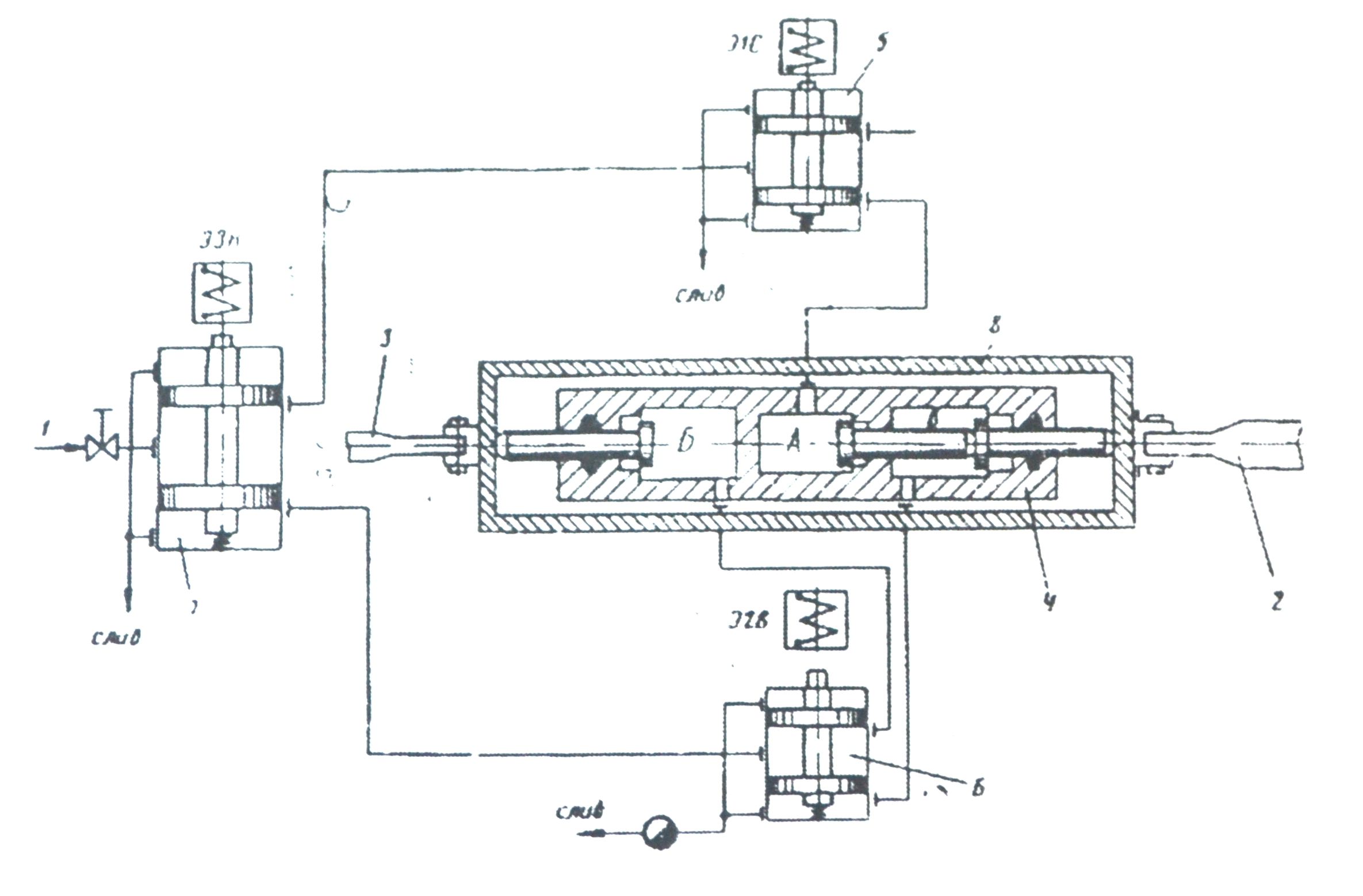
Рис. 4 Дополнительная гидроаппаратура для передачи команды от измерителя на сервопривод пресса
В режиме автоматического реверса пресс управляется вручную, но в момент достижения заданного размера включается электромагнит Э1С. В результате полость А сервомотора 4 через золотник 5 соединяется с напорной магистралью 1 и плунжер полости А перемещает рамку 8 в среднее положение, что соответствует обратному ходу подвижной поперечины. Через 30-40 мм хода поперечины вверх электромагнит Э1С отключается, после чего возможен очередной рабочий ход.