

5.Рульове керування
Для рульового керування визначають кінематичне іω та силове іp передавальні числа:
![]() ,
(5.1);
,
(5.1);
![]() ,
(5.2);
,
(5.2);
Чисельне значення:
![]()
![]()
де αр.к, αк.к – кути повороту відповідно рульового й керованого коліс,
αр.к = 540...1080°, αк.к = 35. ..40°;
іωм і іωп ,ір.м. і ір.п – кінематичне і силове передавальні числа відповідно рульового механізму і рульового приводу;
![]() –
сумарний
момент опору повороту керованих коліс;
–
сумарний
момент опору повороту керованих коліс;
G=8515 Н – вага, що припадає на керовані колеса;
f=0,018– коефіцієнт опору коченню;
ц = 0,6...0,8 – коефіцієнт зчеплення шини з полотном дороги;
rковз = (0,12...0,15) rк – радіус ковзання шини, м;
rк – радіус кочення колеса, м (rк ≈ rст ≈ rд);
R = 0,2...0,25 м – радіус рульового колеса, м;
Mрк= Рр к ·R=350∙0.25=87,5 Н∙м – момент, який прикладається до рульового колеса;
СР.к – зусилля, яке водій прикладає до рульового колеса, З; Необхідно виконання умови Рр.к ≤ 400 Н.
С – радіус повороту (радіус обкочування) керованого колеса, (довжина перепендикуляра, опущеного з центра п’ятна контакту шини з полотном дороги на подовження осі шворня).
5.1Рульовий механізм
Необхідне зусилля на рульовому колесі
![]() (5.3);
(5.3);
Чисельне значення:
![]() Н
Н
де ηр.м – 0,6...0,7 – ККД рульового механізму (прямий);
ηр.к = 0,85...0,95 – ККД рульового приводу.
Оскільки отримано при розрахунку 400Н > 124 Н необхідності встановлювати гідро підсилювач немає.
5.2Рульовий привід
Значення кутів повороту керованих коліс автомобіля (без урахування кутів бокового уводу шин) знаходяться із залежності:
![]() (5.4);
(5.4);
 де
αз, αвн
– кути повороту
відповідно зовнішнього і внутрішнього
коліс;
де
αз, αвн
– кути повороту
відповідно зовнішнього і внутрішнього
коліс;
М – відстань між осями повороту керованих коліс (між осями шворнів);
L – база автомобіля.
Основні розміри рульової трапеції M, m, n визначаються за схемою на рисунку 5.1.

Рисунок 5.1 – Схема визначення геометричних розмірів трапеції
Для визначення величини М задаються довжиною поворотної цапфи (із конструктивних міркувань). При тороїдних шинах орієнтовно можна прийняти lц = Вш , де Вш – ширина профілю шини.
Кут и знаходимо за формулою:
![]() (5.5);
(5.5);
Чисельне значення:
![]()
за умови, що m/n = 0,12...0,16.
Без урахування еластичності шин можна прийняти x = 0,7. Тоді
 (5.6);
(5.6);
Чисельне значення:
![]() м
м
Далі перевіряємо точність виконання залежності (5.4) за знайденими значеннями геометричних розмірів трапеції. Для цього в масштабі не менше ніж 1: 10 креслять схему рульової трапеції (рисунок 5.2). Потім, повертаючи одне з коліс (графічно) через 5° у межах можливого кута повороту, визначають кут повороту іншого колеса. Одержані дані заносимо у таблицю 5.1 і будуємо рисунок 5.2.
1,4
71
71
1,299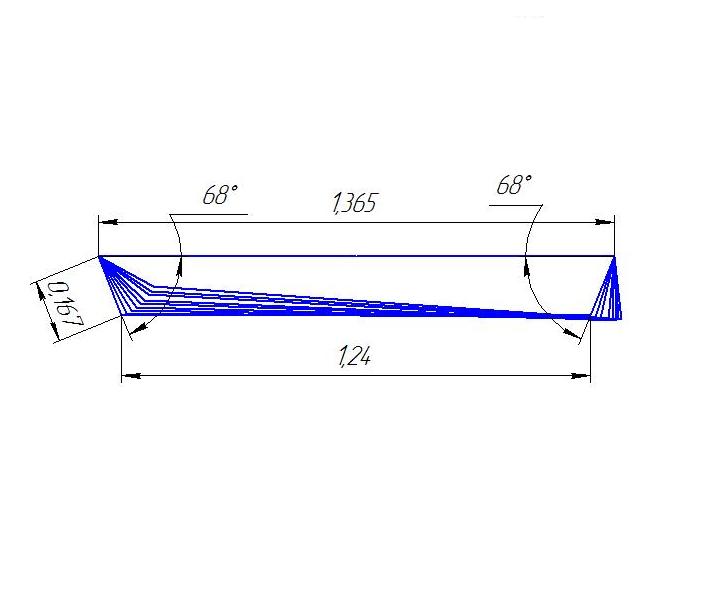
Рисунок 5.2 – Схема для визначення залежності між кутами повороту керованих коліс
Таблиця 5.1 – Кути повороту керованих коліс
Кути повороту колеса |
Внутрішній αвн |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
|
Зовнішній αз |
теоретичний |
9,7 |
19,8 |
28,9 |
38,5 |
47,4 |
56,8 |
65,37 |
|
графічний |
9,3 |
19,5 |
28,2 |
37,8 |
47,1 |
55,7 |
65,7 |
||
Теоретичні значення αз обчислюємо за виразом (5.4). Далі за даними таблиці 5.1 будуємо графіки залежності αз = f(αвн) (рисунок 5.3).
αз
αвн

Рисунок 5.3– Залежність між кутами повороту керованих коліс автомобіля
Геометричні параметри рульової трапеції вважають задовільними, якщо при повороті коліс на кут до 20° графічна та теоретична залежності збігаються (відхилення не перевищує 2 ... 3°).