

Перевод в цветовое пространство st
Цветовое пространство RGB не является наиболее подходящим для решения поставленной задачи. Хорошо зарекомендовало себя пространство ST (название образовано по начальным буквам основных характеристик – Saturation Tint – Насыщенность Тон)[15, 16].
Переход из цветового пространства RGB в пространство ST осуществляется по следующим формулам:

 ,
,
где
![]() ,
,
![]() .
.
Для реализации предложенного метода, необходимо перевести в пространство ST как изображения входной выборки, так и исследуемое изображение.
Значения компонент S и T следует нормировать по формулам [7]:
![]() ,
,
![]() ,
где
MinS
и MaxS
– минимальное и максимальное соответственно
значения компоненты S,
а MaxT
– максимальное значение T
компоненты.
,
где
MinS
и MaxS
– минимальное и максимальное соответственно
значения компоненты S,
а MaxT
– максимальное значение T
компоненты.
В ходе работы программы производилась также визуализация ST пространства. На Рис.7. представлены слева – ненормализованное, справа – нормализованное ST пространство.

Рис.7.
Усреднение по тренировочному набору и расчет дисперсии
Для работы алгоритма необходимо найти средние значения компонент S и T для тренировочной выборки. Для этого найдем среднее арифметическое значений S и T для каждого пикселя 16 изображений набора. Также рассчитаем дисперсию.
Вычисление расстояния Махаланобиса
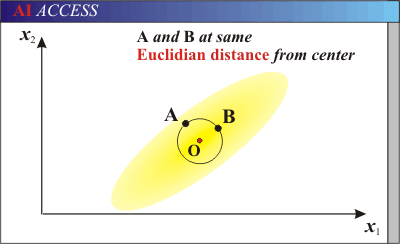
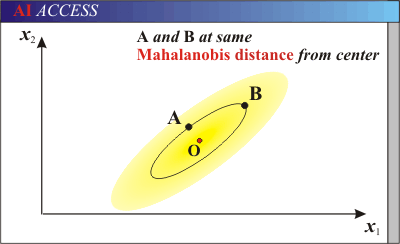
Расстояние Махаланобиса – метрика, предложенная индийским ученым Прасантой Чандра Махаланобисом в 1936 году. Данное расстояние очень показательно для определения различий между известным и новым набором данных. На Рис.8. представлены наглядные различия между Евклидовой метрикой (а) и метрикой Махаланобиса (б).
а) б)
Рис. 8.
Применительно к поставленной задаче расстояние Махаланобиса будет вычисляться по формуле:

![]() – среднее
значение компоненты S изображений из
тренировочной выборки,
– среднее
значение компоненты S изображений из
тренировочной выборки,
![]() – среднее
значение компоненты T изображений из
тренировочной выборки,
– среднее
значение компоненты T изображений из
тренировочной выборки,
![]() – дисперсия
– среднее отклонение значений на
тренировочной выборке,
– дисперсия
– среднее отклонение значений на
тренировочной выборке,
![]() – значение
компоненты T в пикселе с координатами
[i,j] входного изображения,
– значение
компоненты T в пикселе с координатами
[i,j] входного изображения,
![]() – значение
компоненты S в пикселе с координатами
[i,j] входного изображения.
– значение
компоненты S в пикселе с координатами
[i,j] входного изображения.
Классификация
Прежде,
чем строить классификатор, определяющий,
какие точки будут отнесены к пикселям
кожи, а какие – нет, необходимо нормировать
величину
![]() .
Для этого найдем максимальное значение
расстояния Махаланобиса и разделим
на него. Тогда
.
Для этого найдем максимальное значение
расстояния Махаланобиса и разделим
на него. Тогда
 .
.
 -
нормированное значение расстояния
Махаланобиса.
-
нормированное значение расстояния
Махаланобиса.
Пиксель маркируется, как пиксель кожи, если нормированное расстояние Махаланобиса для него меньше 0.7. Константа 0.7 была подобрана из изучения экспериментальных данных, в разработанной программе пользователю предоставляется возможность изменять ее значения и видеть различие результатов для различных изображений.
Поиск глаз
Получение оценок на радиус глаза
На предыдущем этапе был выделен кожный покров на входной фотографии. Оценка на радиус глаза строится исходя из площади кожного покрова на изображении, что позволит работать с изображениями лиц под любым углом наклона.
Вычислив
площадь кожи Sskin,
считаем, что радиус глаза reye
=
![]() .
.
На Рис.9. графически изображена оценка радиуса глаза.
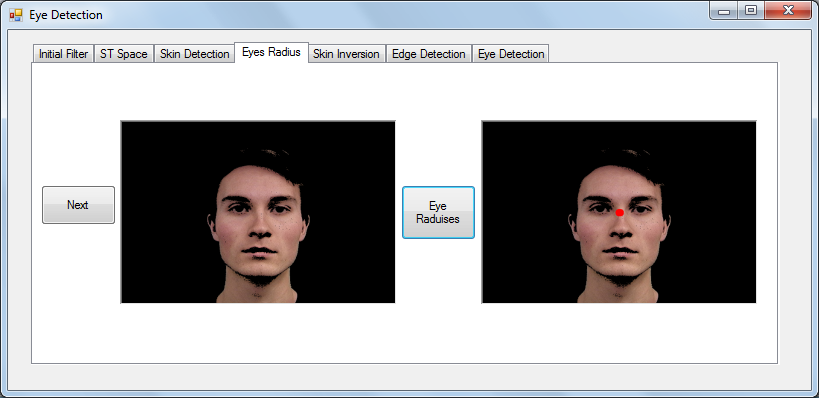
Рис.9.
Удаление областей, не относящихся к коже
Для того чтобы избавиться от лишних областей рассмотрения и ложных «кандидатов» глаз, удалим «шум» на границах. Шумом будем считать группы пикселей менее 5 стоящих рядом. Удаление проводилось путем прохода по изображению по вертикали и горизонтали и анализа групп пикселей, стоящих рядом.
На Рис.10. приведен результат работы данного этапа алгоритма.
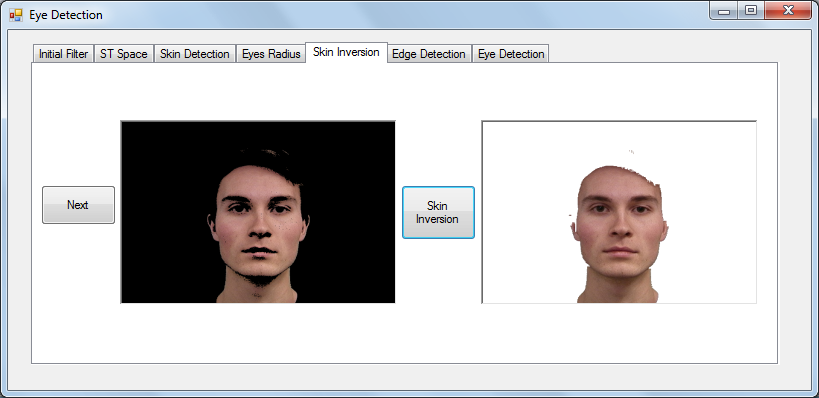
Рис.10.
Применение детектора границ Канни
Основные этапы работы алгоритма Канни
Основная идея этого подхода заключается в создании скалярной функции, определяющей величину границы и ее ориентацию для каждого пикселя. Сами же границы определяются путем применения минимаксного подхода и пороговой классификацией функции границ [17, 18].
Граница (контур, край) – это резкий переход яркости. Возможны различные причины его возникновения:
Резкое изменение нормали поверхности
Резкое изменение глубины сцены
Резкое изменение цвета поверхности
Резкое изменение освещенности
Нахождение таких областей возможно организовать на основе анализа первой и второй производной изображения.
Предположим, график изображения имеет такой вид:
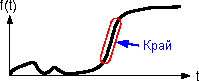
Тогда график его
первой производной будет таковым: второй производной:
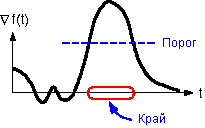
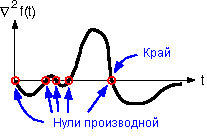
Известно, что наибольшее изменение функции происходит в направлении ее градиента.

Величина изменения измеряется абсолютной величиной градиента.

Направление градиента задается равным:
![]()
«Направление края» считается направление, перпендикулярное градиенту.
Абсолютную величину градиента, задающуюся следующей формулой:

принято называть «силой края».
Первым этапом было размытие входного изображения при помощи фильтра Гаусса, который является сверткой по функции:

Параметр задает степень размытия. В предлагаемой программе = 1.
Сверткой функции принято называть операцию, показывающую степень «схожести» одной функции с отраженной и сдвинутой копией другой [18].
В разработанном приложении пользователю предоставлена возможность самостоятельно регулировать радиус и ширину ядра свертки (Gaussian Kernel Radius и Gaussian Kernel Width соответственно), отвечающие за степень размытия.
Далее производится расчет градиентов изображения при помощи выше описанных формул, также вычисляется сила краев и все пиксели, сила краев которых меньше T, убираются из рассмотрения, для гарантии тонкости полученного контура.
Для получения связанного контура применяем алгоритм поиска локальных максимумов (минимаксный подход):
Выбираем еще не обработанную точку локального максимума p, в которой сила края
Прослеживаем край выбранного локального максимума p:
А) Предсказываем следующую точку края q,
Б)
Проверяем условие
![]() ,
где
,
где
![]()
В) Если неравенство пункта Б) верно, то p=q, переходим на начало шага 2.
Г) Иначе переходим к шагу 1.

Для
того чтобы уменьшить влияние шума при
инициализации, используем порог
![]() ,
а для обеспечения связности получаемых
контуров используем меньший порог
,
а для обеспечения связности получаемых
контуров используем меньший порог
![]() .
.

В предложенной реализации детектор границ также учитывает полученные ранее оценки на радиус глаза.
На Рис.11. приведен результат работы данного этапа алгоритма.
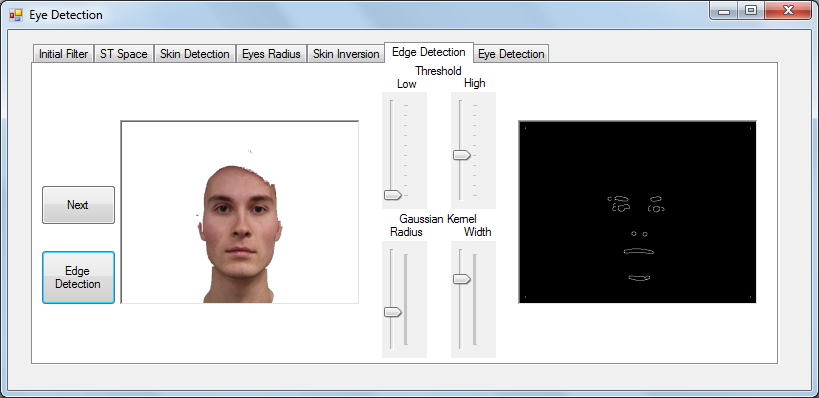
Рис.11.