

Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Северо-Западный государственный заочный
технический университет
Механико-технологический институт
Контрольная работа № 1
по дисциплине «Металлорежущие станки».
Тема: “Настройка зубофрезерного станка для нарезания
червячного колеса методом тангенциальной подачи”.
Выполнил студент:
МТИ
Курс: IV
Специальность: 151001.65
Шифр: 057
Оценка:
Преподаватель: Денисов Валентин Александрович
Дата:
Санкт-Петербург 2011 г.
План
I. Кинематическая схема станка
II. Настройка цепи главного движения
III. Настройка цепи обката (деления)
IV. Настройка цепи тангенциальной подачи
V . Настройка цепи дифференциала
I. Кинематическая схема станка
Нам дана кинематическая схема зубофрезерного станка, работающего по методу обката (деления) червячной фрезы.
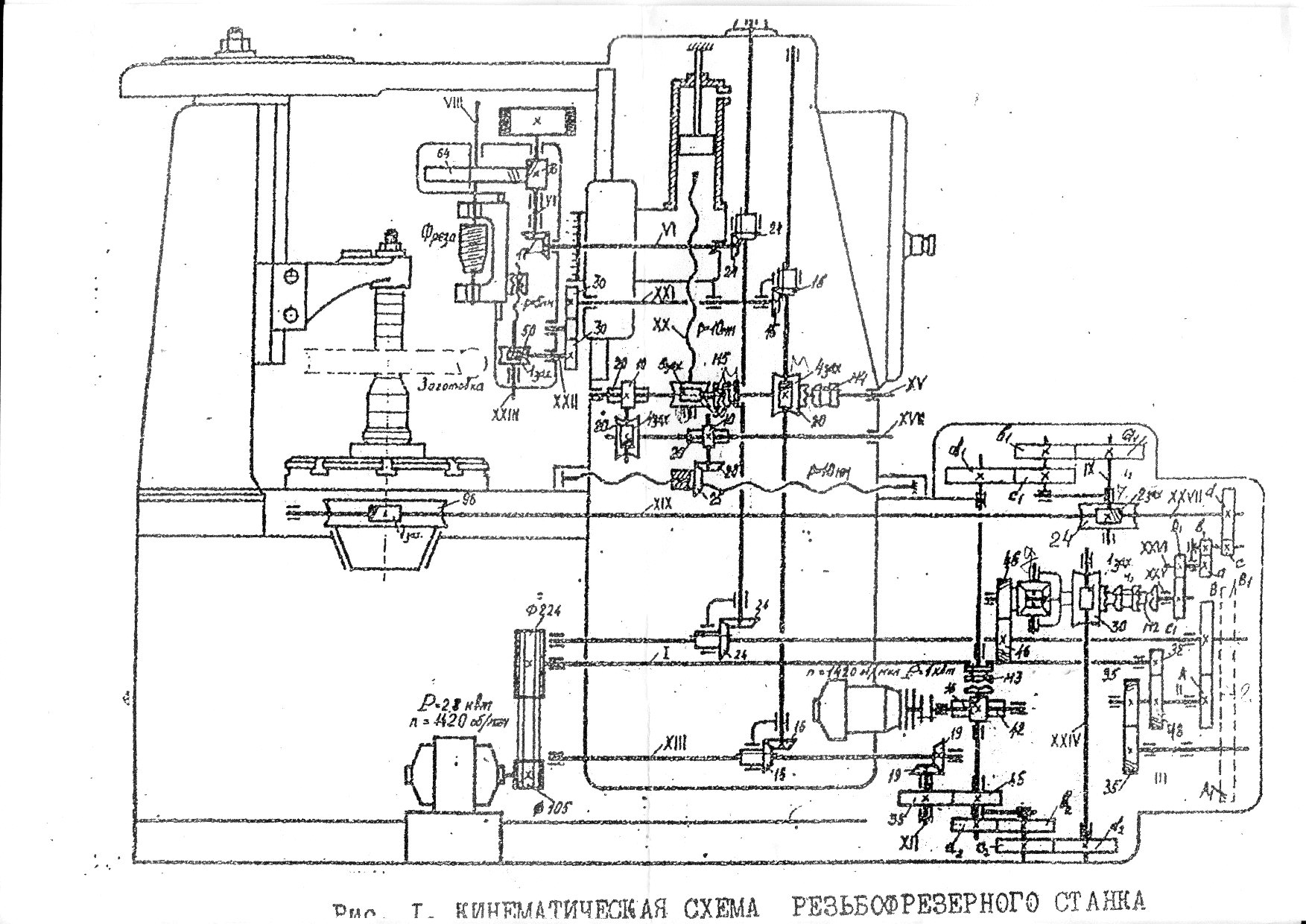
Рис. 1. Кинематическая схема зубофрезерного станка
Требуется настроить станок для нарезания червячного колеса методом тангенциальной подачи. Для этого необходимо настроить четыре кинематические цепи:
цепь главного движения,
цепь обката (деления),
цепь тангенциальной подачи,
цепь дифференциала.
Исходные данные представлены в таблице.
Параметры |
Исходные данные |
|
z |
52 |
По последней цифре шифра |
dao, мм |
57,4 |
|
ms, мм |
3,5 |
|
V, мм/мин |
25 |
По предпоследней цифре шифра |
S, мм/об |
1,4 |
|
z — число зубьев обрабатываемой детали,
dao, мм — наружный диаметр однозаходной червячной фрезы,
ms, мм — осевой модуль однозаходной червячной фрезы,
V, мм/мин — скорость резания,
S, мм/об — подача.
Под кинематической настройкой станка понимают настройку его цепей, обеспечивающую требуемые скорости движений исполнительных органов станка, а также, при необходимости, условия кинематического согласования перемещений или скоростей исполнительных органов между собой. Цель таких согласований — образование поверхности с заданными формой, размерами, точностью и шероховатостью. Кинематическая настройка является составной частью наладки станка.
В большинстве металлорежущих станков с механическими связями для настройки кинематических цепей применяют органы кинематической настройки в виде гитар сменных зубчатых колёс, а также ременных передач, вариаторов, регулируемых электродвигателей, коробок скоростей и подач, характеристикой которых является общее передаточное отношение ί органа. Значение передаточного отношения органа настройки определяют по формуле настройки и затем реализуют в гитарах сменных зубчатых колёс подбором и установкой соответствующих колёс в гитаре, а в коробках скоростей и подач — зацеплением соответствующих зубчатых колёс.
Для вывода формулы настройки любого органа кинематической настройки необходимо по кинематической схеме станка наметить такую цепь передач, в которой расположен данный орган и известны перемещения или скорости конечных звеньев этой цепи, связанные функциональной или требуемой зависимостью. Желательно, чтобы такая цепь передач, называемая в дальнейшем цепью согласования, включала в себя только один орган настройки, для которого выводят формулу.
Для выбранной цепи согласования составляют условие кинематического согласования перемещений её конечных звеньев, совершающихся в течение определённого промежутка времени, или их скоростей. Эти перемещения могут быть угловыми, линейно-угловыми и линейными. С учётом условия согласования перемещений или скоростей составляют уравнение кинематического баланса цепи согласования, в котором неизвестным является передаточное отношение ί органа настройки. При этом следует учитывать, что при совпадении порядка записи с направлением передачи движения через орган настройки символ ί записывают в числитель; при отсутствии этого условия — в знаменатель. Уравнение баланса можно записывать от любого конца цепи согласования. Решение уравнения баланса относительно передаточного отношения органа настройки представляет собой формулу настройки. В общем виде формула настройки показывает зависимость передаточного отношения органа настройки от переменных параметров условия кинематического согласования перемещении конечных звеньев цепи согласования и её постоянной, то есть ί = f (C, переменные параметры условия согласования), где ί — передаточное отношение органа настройки; C — постоянная цепи согласования, зависящая от передаточных отношений её промежуточных передач и постоянных параметров условия согласования перемещений.