

5. Правило Крамера.
Теорема
(правило Крамера для системы nxn)
– Если главный определитель ∆ системы
линейных уравнений ≠ 0, то система
совместна и имеет 1 решение, которое
находится по формулам
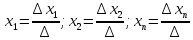 .
.
6. Решение систем линейных алгебраических уравнений матричным методом.
Имеем
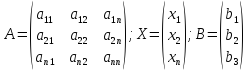 .
На основании правила умножения матриц
заменим систему уравнений матричным
уравнением с неизвестной матрицей Х:
AX=B. Пусть
А имеет обратную матрицу А-1,
умножив матричное уравнение на А-1
слева, получим: А-1∙А∙Х = А-1∙В.
.
На основании правила умножения матриц
заменим систему уравнений матричным
уравнением с неизвестной матрицей Х:
AX=B. Пусть
А имеет обратную матрицу А-1,
умножив матричное уравнение на А-1
слева, получим: А-1∙А∙Х = А-1∙В.
Т.к. А∙А-1 = Е, а Е∙Х = Х, то имеем Х = В∙А-1 – матричная запись решения системы линейных уравнений.
7. Векторы. Линейные операции над векторами и их свойства. Проекция вектора на ось.
Геометрическим
вектором называется направленный
отрезок АВ. Вектор ВА (или -АВ) –
противоположный вектору АВ. Длиной
вектора АВ или его модулем называется
длина соответствующего отрезка АВ.
Перемещение вектора в пространстве –
параллельный перенос. 2 вектора называются
равными, если параллельным переносом
их можно совместить ( ).
Если начало и конец вектора совпадают,
то такой вектор называется нулевым (
).
Если начало и конец вектора совпадают,
то такой вектор называется нулевым ( ).
Если
).
Если
 ,
то вектор называется единичным. Векторы
называются коллинеарными, если их можно
совместить (нулевой вектор коллинеарен
любому векторы). Векторы называются
компланарными, если их можно разместить
в одной плоскости. 1) Сложение 2-х векторов
,
то вектор называется единичным. Векторы
называются коллинеарными, если их можно
совместить (нулевой вектор коллинеарен
любому векторы). Векторы называются
компланарными, если их можно разместить
в одной плоскости. 1) Сложение 2-х векторов

2) Умножение вектора на число
Углом между
2-мя векторами называется меньший из
2-х угол между ними ( .
Если угол = 90о, то векторы называются
перпендикулярными (ОРТО). Имеем вектор
АВ
.
Если угол = 90о, то векторы называются
перпендикулярными (ОРТО). Имеем вектор
АВ
Число хВ
– хА – проекция вектора на ось
(может быть +, -, 0). Ох = .
.
8. Линейная зависимость векторов. Разложение вектора по базису.
Векторы а1, а2, … , аn называются линейно-зависимыми, если существуют такие числа с1, с2, … , сn, не все = 0, для которых имеет место равенство с1а1 + с2а2 + … + сnan = 0. Векторы а1, а2, … , аn линейно-независимы если равенство с1а1 + с2а2 + … + сnan = 0 выполняется только при условии с1 = с2 = … = сn = 0. Базис на прямой – любой ненулевой вектор этой прямой, на плоскости – любые 2 неколлинеарных вектора этой плоскости, взятые в определенном порядке, в пространстве – любые 3 некомпланарных вектора, выбранные в определенном порядке (на плоскости и в пространстве сколько угодно базисов). Если вектор а – базис на прямой и b – вектор этой прямой, то b = λa (а и b линейно-зависимы). Если (a, b) – базис на плоскости и c – вектор этой плоскости, то c = αa + βb (a, b, c, линейно-зависимы). Если (a, b, c) – базис в пространстве и d – вектор в этом пространстве, то d = αa + βb + γc (a, b, c, d линейно зависимы). Все числа единственны (α, β, γ, λ). Число λ – координата вектора b на прямой в базисе а и т.д.
9. Декартова система координат. Координаты вектора. Направляющие косинусы, длина вектора. Деление отрезка в данном соотношении.
Пусть i, j,
k единичные с общим началом
0 взаимно перпендикулярные 3 вектора
пространства и пусть (i,
j, k) – базис
этого пространства (ортонормированный).
Через эти вектора проведем Х, Y,
Z соответственно базисным
векторам (прямые – оси координат, точка
О – начало). Совокупность точки О и осей
– Декартовая система координат
пространства. Также и с прямоугольной
Декартовой системы на плоскости (базис
(i, j), оси X,
Y). Имеем систему координат
в пространстве, тогда вектор АВ имеет
координаты (х2-х1, у2-у1,
z2-z1).
Длина вектора |AB|= .
.