

3.3 Построение характеристик трансформатора
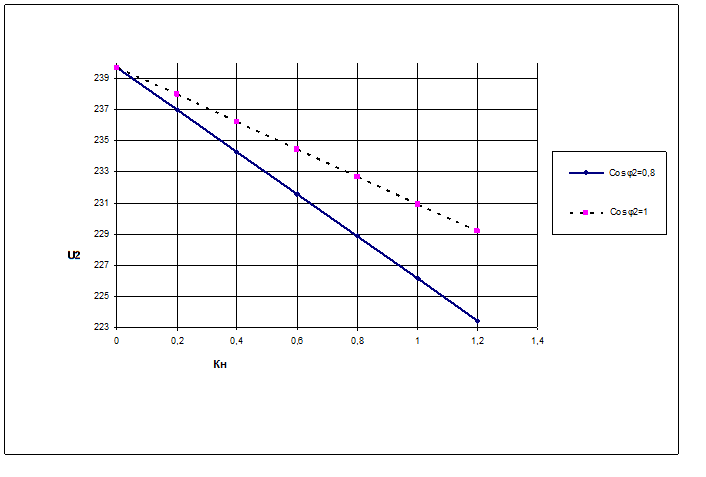
Рисунок 3.3 – Внешние характеристики U2= f(kн)

Рисунок 3.4 – Зависимость КПД от нагрузки трансформатора η= f(kн)
4 Анализ трехфазного асинхронного двигателя
Асинхронная машина (АМ) является машиной переменного тока, у которой в установившемся режиме круговое магнитное поле и ротор вращаются с разными угловыми скоростями (асинхронно). В зависимости от конструкции ротора могут быть АМ с короткозамкнутым или фазным ротором.
АМ, как все электрические машины, обратима, т.е. в режиме двигателя она может преобразовывать электрическую энергию в механическую, в режиме генератора – механическую в электрическую.
На практике в основном АМ используется в двигательном режиме, асинхронные двигатели являются основными двигателями в электроприводах большинства промышленных предприятий.
В основе принципа действия всех электрических машин (в том числе и асинхронных) лежат закон электромагнитной индукции Фарадея – Максвелла и закон электромагнитной силы Ампера.
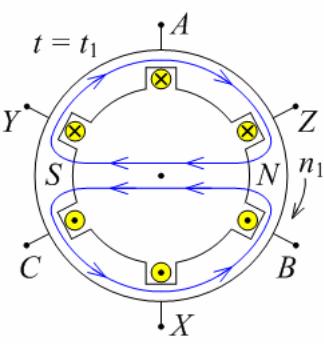
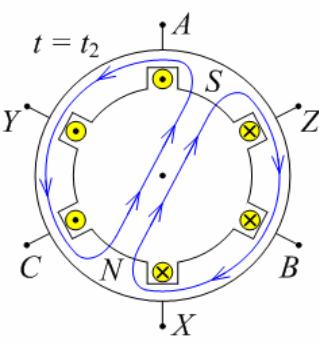
Основным физическим явлением в работе АМ является процесс образования кругового вращающегося магнитного поля неподвижной трехфазной обмоткой статора. Образование вращающегося магнитного поля можно рассмотреть на разрезах статора АМ с упрощенной трехфазной обмоткой из одновитковых диаметральных катушек AX, BY, CZ. При допущении линейной зависимости индукции от тока, картины результирующего магнитного поля для нескольких моментов времени при максимуме токов в фазах: A при t1 (рис. 4.1, б), B при t2 (рис. 4.1, в) и C при t3 (рис. 4.1, г).
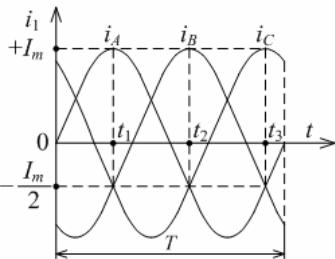
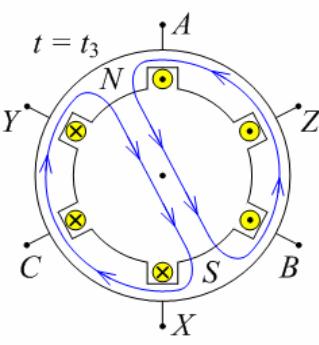
а б в г
Рисунок 4.1-Образование обмоткой статора вращающегося магнитного поля
Сопоставление магнитных полей для разных моментов времени указывает на вращение всей картины токов и магнитного поля по часовой стрелке. За один период токов для рассмотренного примера поле делает полный оборот.
Условия образования вращающегося магнитного поля трехфазной обмоткой: смещение катушек разных фаз на 2τ/3; сдвиг токов в катушках
п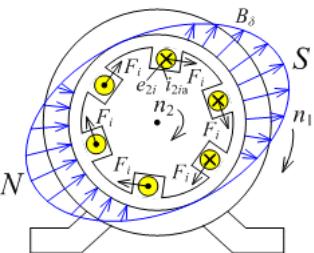 о
фазе на 2π/3; равенство действующих фазных
магнитодвижущих сил фазных обмоток.
о
фазе на 2π/3; равенство действующих фазных
магнитодвижущих сил фазных обмоток.
Принцип действия асинхронного двигателя можно объяснить с использованием рис. 4.2, на котором изображено двухполюсное вращающееся магнитное поле в виде «волны» магнитной индукции Bδ с синусоидальным распределением в воздушном зазоре.
Рисунок
4.2- Разрез асинхронной машины
![]() (4.1)
(4.1)
ЭДС в проводниках ротора создают токи, отстающие по фазе от ЭДС, т.е. имеют активную и реактивную составляющие. Активная составляющая совпадает по фазе с ЭДС и создает вращающий момент, реактивная составляющая обусловлена наличием магнитных полей, создает знакопеременную силу.
Электромагнитная сила, действующая на проводник периодически изменяется с двойной частотой. Среднее значение (постоянная составляющая) силы:
![]() (4.2)
(4.2)
где I2ia – действующее значение активной составляющей тока ротора, А;
Bδ~ – действующее значение магнитной индукции в воздушном зазоре, Тл.
Вращающий электромагнитный момент ротора:
![]() (4.3)
(4.3)
где D – диаметр ротора, м;
N – количество проводников (пазов) ротора.
Относительную разность частот вращения поля и ротора характеризует скольжение:
![]() (4.4)
(4.4)
где n2 – частота вращения ротора, об/мин;
n1 – частота вращения магнитного поля статора, об/мин:
![]() (4.5)
(4.5)
где f1 – частота питающего напряжения, Гц;
p – число пар полюсов обмотки статора (число из натурального ряда).
А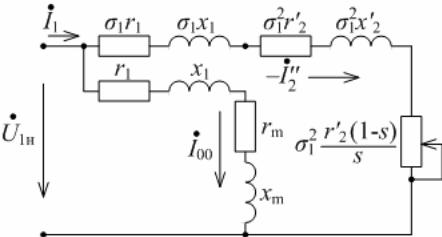 М
в большинстве случаев трехфазные. Для
анализа трехфазной электрической машины
принимают ее симметричной и рассматривают
одну фазу.
М
в большинстве случаев трехфазные. Для
анализа трехфазной электрической машины
принимают ее симметричной и рассматривают
одну фазу.
Рисунок
4.3- Г-образная схема замещения асинхронной
 (4.6)
(4.6)
При анализе АМ рассматривают с неподвижным ротором, механическая мощность, развиваемая двигателем на валу при его вращении, будет равна электрической мощности.
Для анализа АМ большее значение имеет Г-образная схема замещения , полученная путем преобразований выражений (4.6).
Переход от Т-образной к Г-образной схеме замещения необходим, т.к. при неизменном напряжении сети в Т-образной схеме замещения происходит изменение токов не только в главной цепи, но и в ответвленной цепи намагничивания. Токи всех ветвей изменяются при изменении скольжения. В Г-образной схеме ток I00в ответвленном контуре при U1н = const и изменении скольжения остается постоянным, а изменяется лишь ток в главной цепи I′′2.
Физический смысл параметров математической модели (4.6): активные сопротивление обмоток статора и ротора (r1 и r2); индуктивные сопротивления рассеяния обмоток статора и ротора (x1 и x2); индуктивное сопротивление взаимоиндукции приведенной обмотки ротора и обмотки статора (xm); активное сопротивление, эквивалентное потерям в стали статора (rm). Потери в стали ротора не учитываются, т.к. в нормальном режиме частота перемагничивания стали ротора мала. Комплексное число σ1 является коэффициентом приведения тока I2′к I′′2.
В соответствии с вариантом 44 дано:
Таблица 4.1-Технические данные асинхронных двигателей с короткозамкнутым ротором
Последняя цифра варианта |
Типоразмер двигателя |
P2 ном, кВ |
U1л ном, В |
n2 ном, об/мин |
kм |
4 |
4А200М4У3 |
37 |
380 |
1475 |
2,2 |
|
|
|
|
|
|
K = 0.54
Число пар полюсов обмотки статора асинхронной машины p образуют натуральный ряд: 1, 2, 3 и т.д. В соответствии с выражением (4.5) частоты вращения магнитного поля, соответствующие различным значениям p, при промышленной частоте 50 Гц в питающей сети: 3000; 1500; 1000 об/мин и т.д.
Номинальная частота вращения ротора асинхронного двигателя равна 734 об/мин, поэтому частота вращения магнитного поля статора (синхронная частота) будет равна ближайшему большему значению из ряда синхронных частот 750 об/мин, соответственно, число пар полюсов: p = 4.
Скольжение в номинальном режиме по (4.4):
![]()
В двигательном режиме асинхронной машины скольжение изменяется в диапазоне 0 < S < 1. Механическую характеристику n2 = f(M2) и характеристику электромагнитного момента M2 = f(S) АМ можно построить с использованием формулы Клосса:
![]() (4.7)
(4.7)
где kм – кратность максимального момента;
Sкр – критическое скольжение;
Mном – номинальный момент на валу, Н·м:
![]() (4.8)
(4.8)
Нм
Частоту вращения ротора по известным значениям скольжения можно определить по выражению, об/мин:
![]() (4.9)
(4.9)
Критическое скольжение, соответствующее максимальному моменту:
![]() (4.10)
(4.10)
![]()
Для построения характеристики электромагнитного момента M2 = f(S) и механической характеристики n2 = f(M2) для двигательного режима асинхронной машины необходимо использовать выражения (4.7) и (4.9), результаты расчетов необходимо свести в таблицу.
Таблица 4.2-Расчет характеристик асинхронного двигателя
S |
0 |
Sном =0.017 |
0,04 |
Sкр =0.069 |
0,20 |
0,40 |
0,60 |
0,80 |
Sпуск = 1 |
n2, об/мин |
1500 |
1475 |
1440 |
1397 |
1200 |
900 |
600 |
300 |
0 |
M, Н·м |
0 |
Mном =239.66 |
457.54 |
Mmax =527.25 |
325.11 |
176.65 |
119.69 |
90.28 |
Mпуск =72.14 |
При
S=0.04
 Нм; n2=n1(1-S)=1500(1-0.04)=1440
об/мин
Нм; n2=n1(1-S)=1500(1-0.04)=1440
об/мин
при S=0.2 Нм; n2=n1(1-S)=1500(1-0.2)=1200 об/мин
при S=0.4 Нм; n2=n1(1-S)=1500(1-0.4)=900 об/мин
при S=0.6 Нм; n2=n1(1-S)=1500(1-0.6)=600 об/мин
при S=0.8 Нм; n2=n1(1-S)=1500(1-0.8)=300 об/мин
при S=1 Нм; n2=n1(1-S)=1500(1-1)=0 об/мин
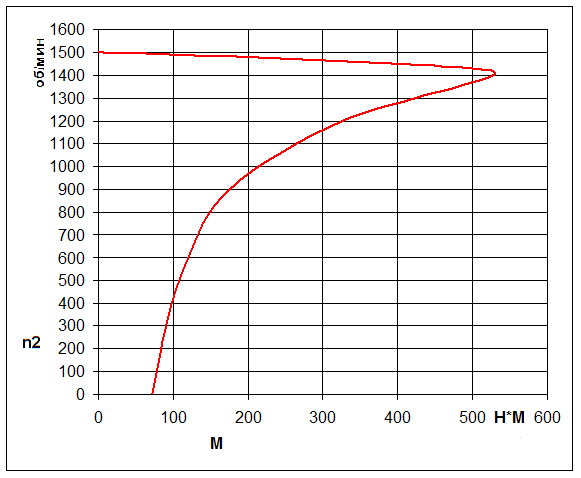
Рисунок 4.4 – Механическая характеристика n2= f(М) асинхронного двигателя
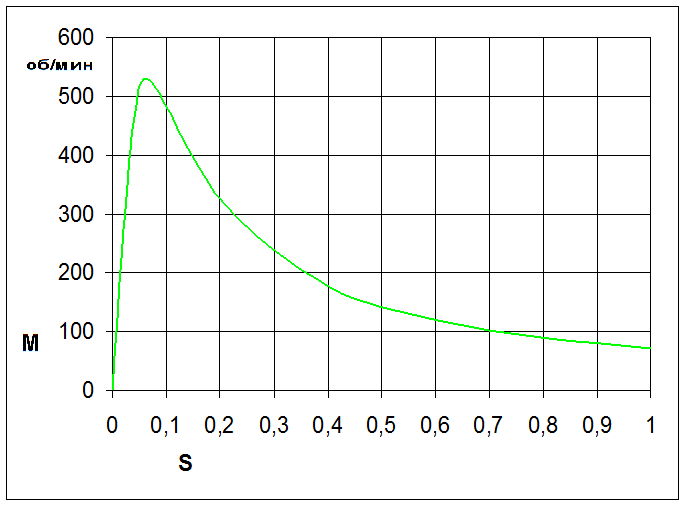
Рисунок 4.5 –Характеристика М= f(S) электромагнитного момента двигателя
ЗАКЛЮЧЕНИЕ
В результате анализа электротехнических устройств и электронных схем изучена конструкция, принцип действия асинхронного двигателя, трансформаторов.
Таким образом изучен принцип действия основных схем выпрямления. Рассчитан выпрямитель для питания электронной схемы при неизменной нагрузке, определены основные параметры схемы замещения силового двухобмоточного трехфазного трансформатора, коэффициент трансформации (), абсолютное значение тока холостого хода (А), значение тока короткого замыкания первичной обмотки при коротком замыкании вторичной обмотки (А), действующие значения тока первичной обмотки (А), при которых КПД трансформатора имеет максимальное значение и составляет 0,989. Построены зависимости М от S, и М от n2 Определено число пар полюсов обмотки статора и частота вращения магнитного поля, рассчитана и построена характеристика электромагнитного момента и механическая характеристика для двигательного режима асинхронной машины, а также максимальный и пусковой момент асинхронного двигателя и частота вращения ротора при заданном моменте сопротивления на валу двигателя.
Для выполнения расчетов выбраны: диод Д7А, стабилитрон Д815В. Тип силового трехфазного двухобмоточного трансформатора - ТМ-400/10, асинхронных двигателей с короткозамкнутым ротором 4А200М4У3.
Б иблиографический
список
иблиографический
список
Электротехника / Под ред. В. Г. Г е р а с и м о в А. – М.: Высшая школа, 1985. 480 с.
2. К а с а т к и н А. С., Н е м ц о в Н. В. Электротехника. – М.: Высшая школа,
3. Анализ электротехнических устройств и электронных схем. А в и л о в В. Д., М о с к а л е в Ю. В., П о п о в Д. И. – Омск 2011