

22 Технические средства управления приводом электровоза
Для управления приводом электровоза используются аппаратуры ТЭРА-1 для аккумуляторных электровозов АРП14, АРП28; УКТН для контактных электровозов.
Аппаратура ТЭРА-1 обеспечивает выполнение следующих основных функций:
Плавный разгон и регулирование скорости.
Плавное электродинамическое торможение.
Обеспечение начала движения только с нулевой скорости.
Выдачу сигналов на управление рельсовыми электромагнитными тормозами, стрелочными переводами и др.
В основу работу аппаратуры ТЭРА-1 положена работа двух силовых импульсно-тиристорных преобразователей.
Аппаратура УКТН в сравнении с ТЭРА-1 дополнительно выполняет следующие функции:
Бесступенчатое задание скорости электровоза и автоматическую ее стабилизацию.
Разрешение управления только из одной кабины электровоза
23 Автоматизация погрузочных пунктов
Автоматизация погрузочных пунктов должна предусматривать управление такими технологическими операциями: загрузка вагонеток с конвейера или аккумулирующего бункера, перемещение состава в процессе загрузки вагонетки и при смене вагонеток, перекрытие межвагонеточного пространства при смене вагонеток, пылеподавление, уплотнение угля в вагонетке (при необходимости), контроль степени загрузки вагонетки и точности ее установки. При этом должно обеспечиваться автоматическое выполнение заданной последовательности технологических операций, необходимые защиты и блокировки.
Автоматизированные комплексы погрузочных пунктов КАП служат для загрузки составов шахтных вагонеток и секционных поездов. В состав комплекса входит (см. рисунок) маслостанция, гидравлический толкатель 3, перекрыватель 5 межвагонеточного пространства с гидравлическим приводом 1, датчики контроля заполнения вагонетки ДПЗ и датчики положения вагонетки ДП7, ДП2 с рабочим органом 2 под загрузочным устройством.
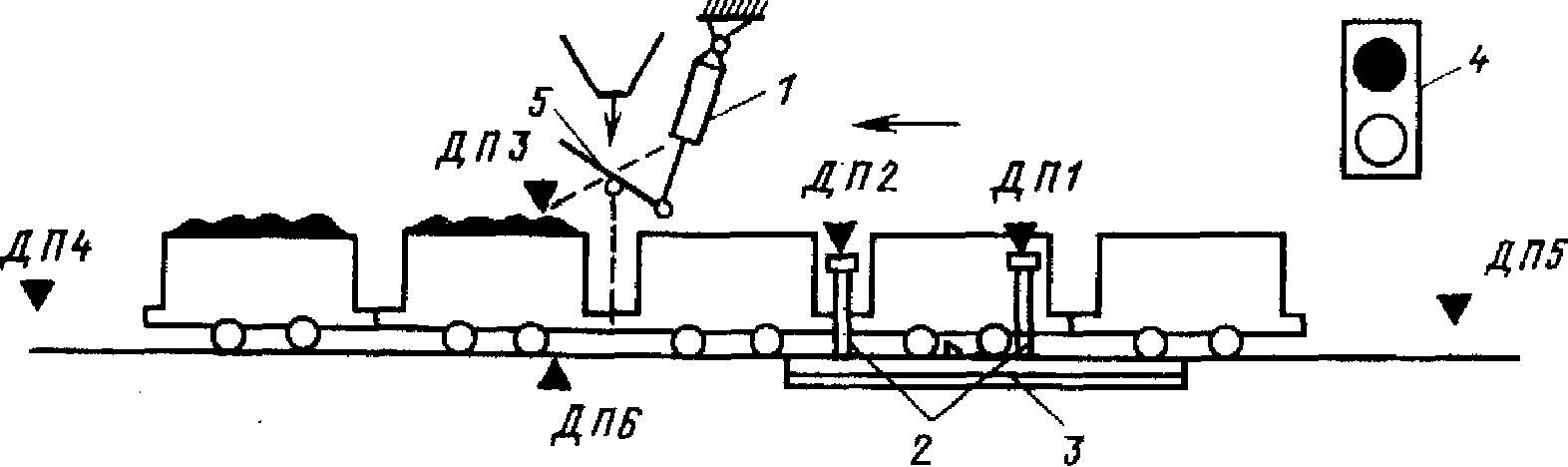
Рисунок - Технологическая схема автоматизированного погрузочного пункта
В процессе загрузки вагонетки датчик заполнения контролирует уровень загрузки вагонетки. При подъеме конуса угля створки датчика поднимаются вверх и воздействуют через трехходовой кран на подачу жидкости в гидроцилиндр толкателя для проталкивания вагонетки. Насыпанный конус угля уходит из зоны датчика, створки его опускаются, трехходовой кран перекрывается и останавливает толкатель на время насыпки следующего конуса угля и т. д.
В электрическую схему комплекса входят контактные датчики положения вагонетки. Датчик ДП1 контролирует приход первой порожней вагонетки в зону толкателя и включает красный огонь светофора 4, запрещающий машинисту дальнейшую подачу состава. Датчики ДП2 и ДП1 при отсутствии вагонеток в их зоне выдают сигнал на прекращение работы погрузочного пункта и включают зеленый сигнал светофора. Датчик ДПЗ контролирует пересып вагонетки. Датчик ДП4 выдает сигнал на запрет работы погрузочного пункта, чтобы предупредить выход первой груженой вагонетки состава за пределы разминовки. Датчик ДП5 выдает запрет на работы при заходе электровоза в зону разминовки погрузочного пункта. Сигнал от датчика ДП6 используется для счета вагонеток при погрузке.